


أخذت جزءًا من تصميمي من تعليمات التجميع لـ Lego Technic 42029. والباقي هو ارتجالي. لذلك نحن بحاجة إلى:
- ليغو تكنيك 42029
- Arduino Nano 382P
- DRV 8833 (أفضل من Populus ، ولكن من الممكن أيضًا نظير صيني)
- 2 محرك سيرفو SG-90
- مستقبل الأشعة تحت الحمراء
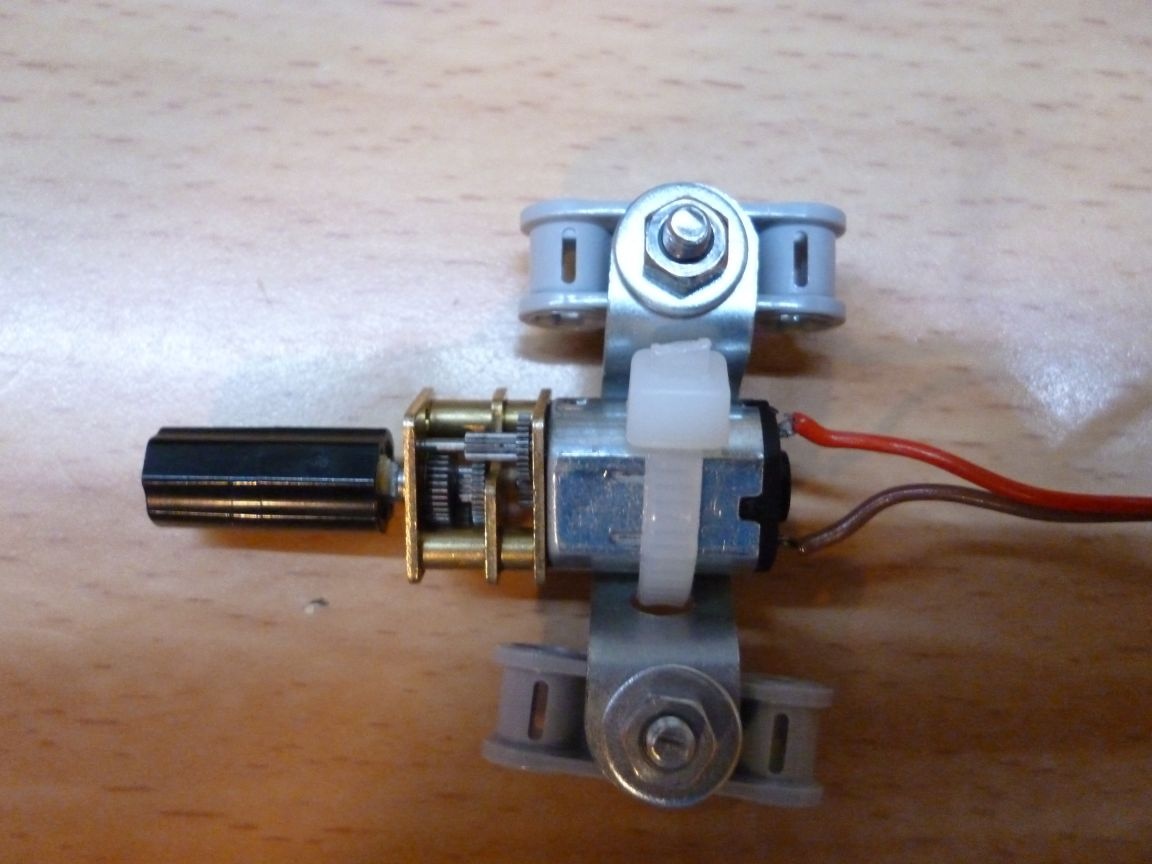
- علبة تروس المحرك 200 دورة في الدقيقة
- عدد 2 ليد
- مقاومتان 150 أوم
- مكثف 10 فولت 1000 فائق التوهج
- 2 صف واحد يمشط PLS-40
- عدد 2 وصلة PBS-20
- مغو 68mkGn
- 6 بطاريات NI-Mn 1.2v 1000mA
- موصل أبي ماما دبوسين إلى سلك
- Homutik
- أسلاك بألوان مختلفة
- جندى
- الصنوبري
- سكين القرطاسية
- لحام الحديد
- مسامير 3x40 وصواميل وغسالات لهم
- مسامير 3x60
- بطاريات Ni-Mn 1.2v 1000mA 6pcs.
الخطوة 1 نقوم بجمع الجزء الخلفي من التعليق.
أولاً ، تحتاج إلى تجميع الجزء الخلفي من التعليق وفقًا لتعليمات Lego 42029 الجزء 1 ، بدءًا من 3 صفحات و 8 شاملة. بعد ذلك ، أضف بعض التفاصيل حتى تتمكن من تثبيت المحرك وعلبة التروس.

الخطوة 2 تعليق أمامي.
نقوم بتجميع الجزء الأمامي من التعليق وفقًا لتعليمات Lego 42029 الجزء 1 ، من الصفحة 21 إلى 23. نأخذ شبه المنحرف من الجزء الثاني من تعليمات Lego من الصفحة 6 إلى 11. نقوم بتجميع الرافعة من الجزء الثاني من الصفحة 14 - 22. والجزء الوفير من الثانية هو 34 -36 صفحة.
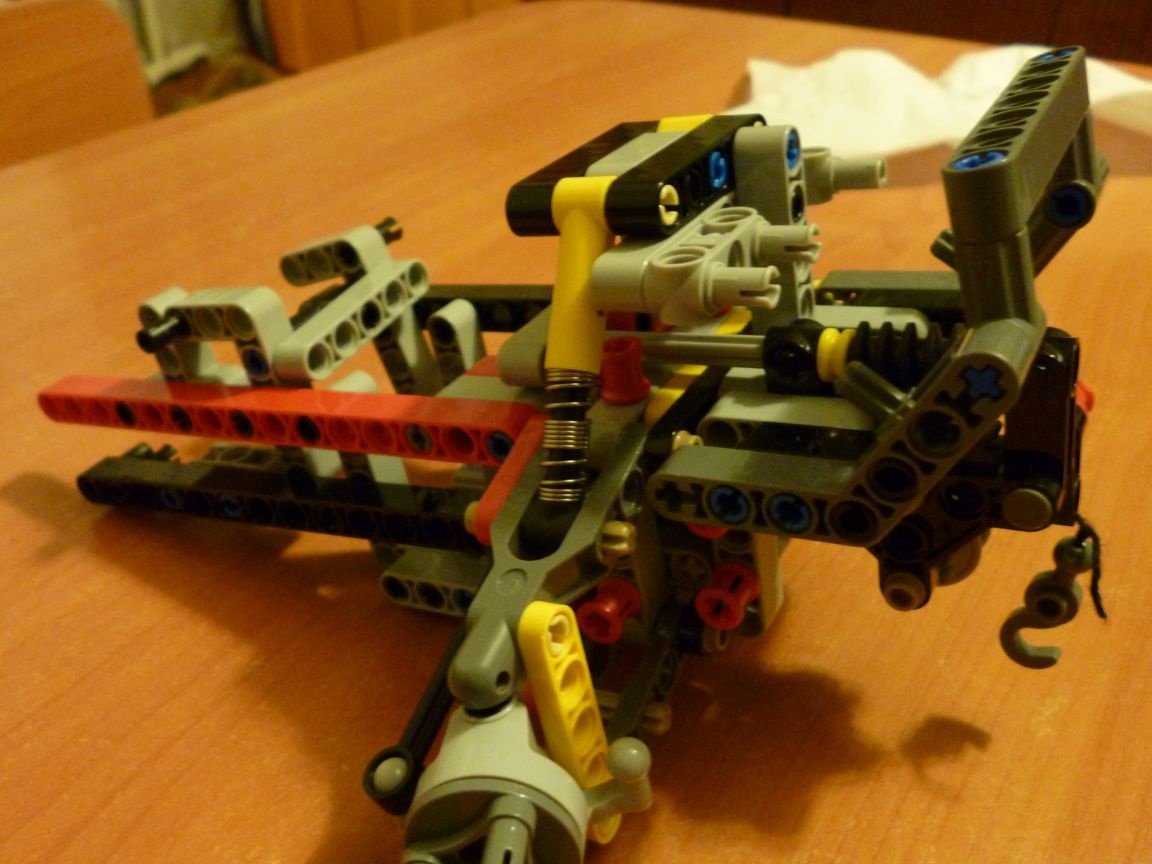
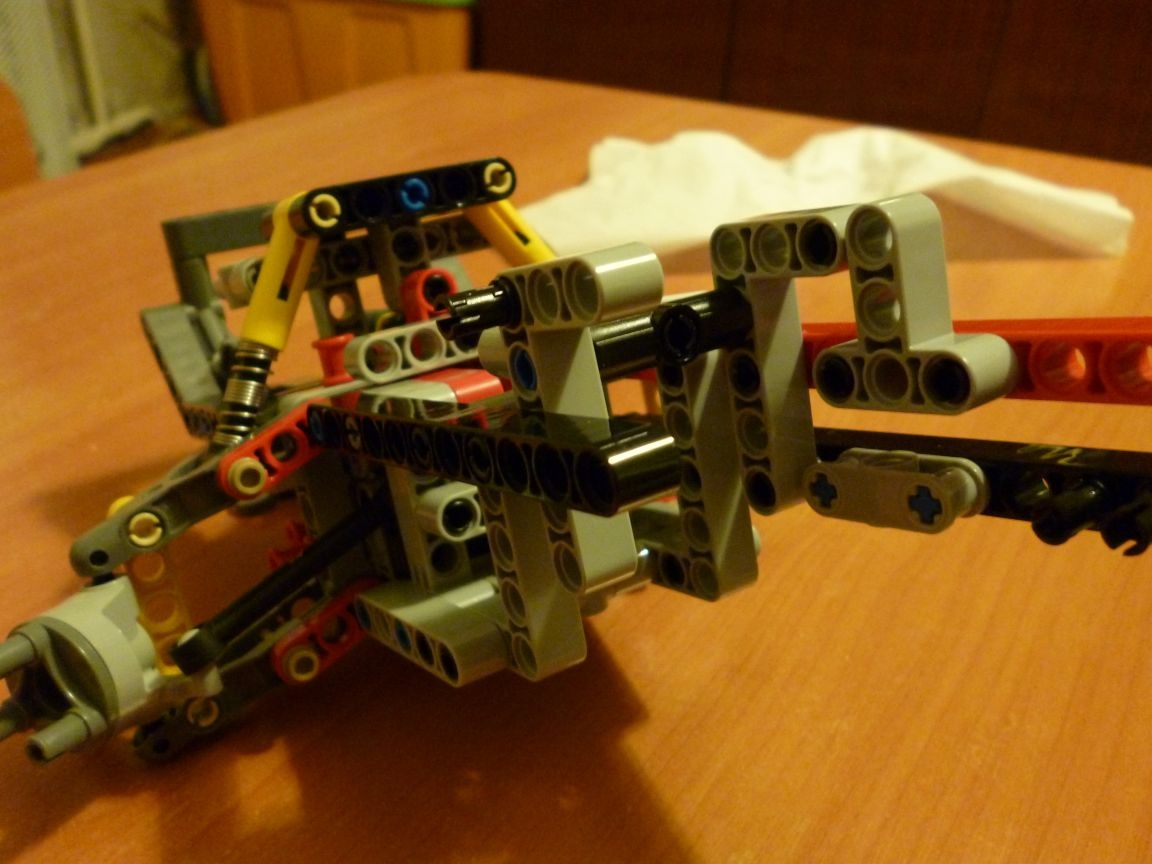
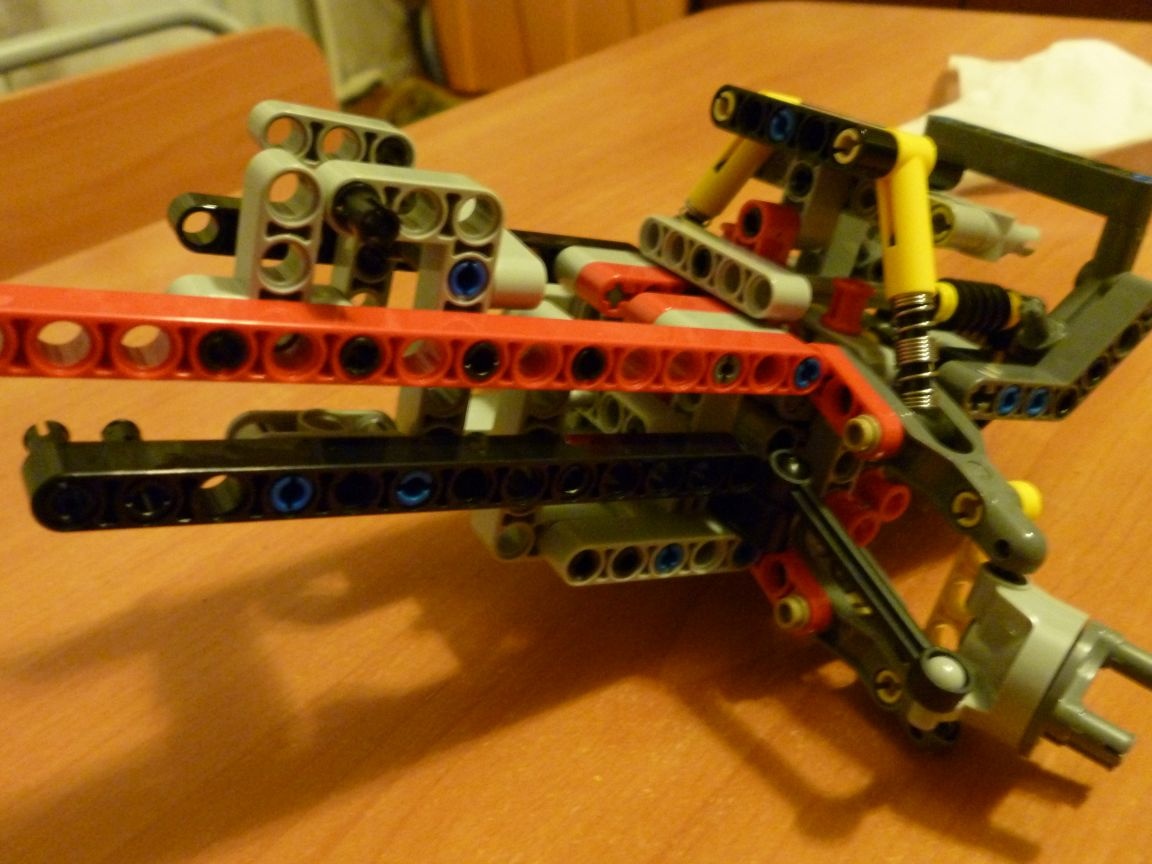

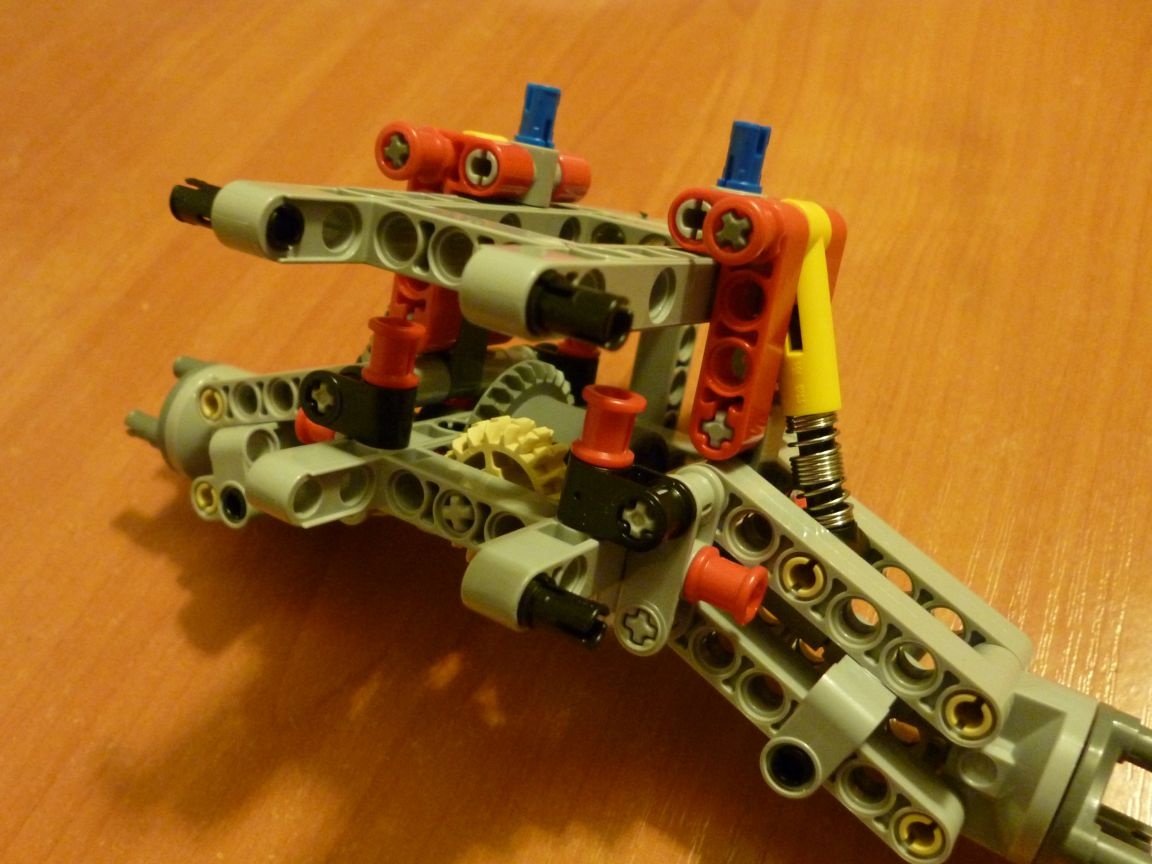
الخطوة 3 قم بتجميع الهيكل المعدني.
نقوم بتوصيل الجزئين كما هو موضح في الصورة:

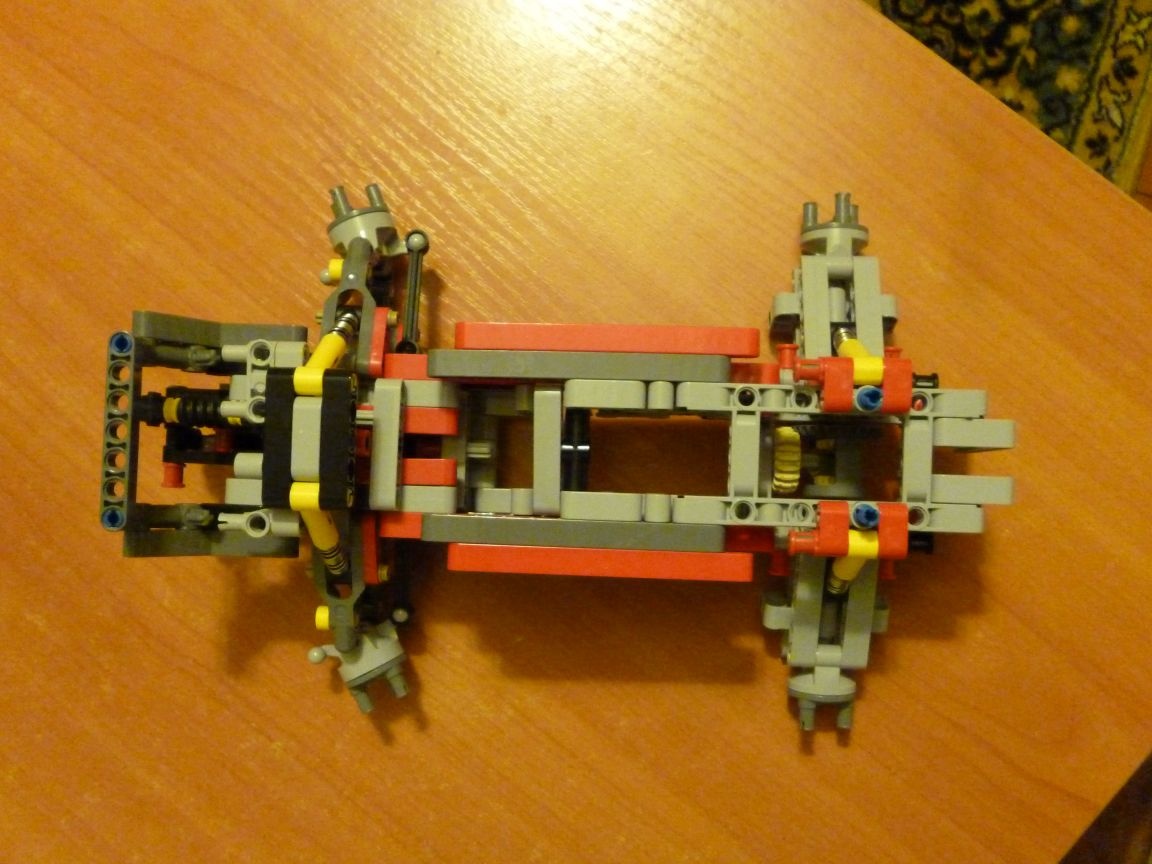
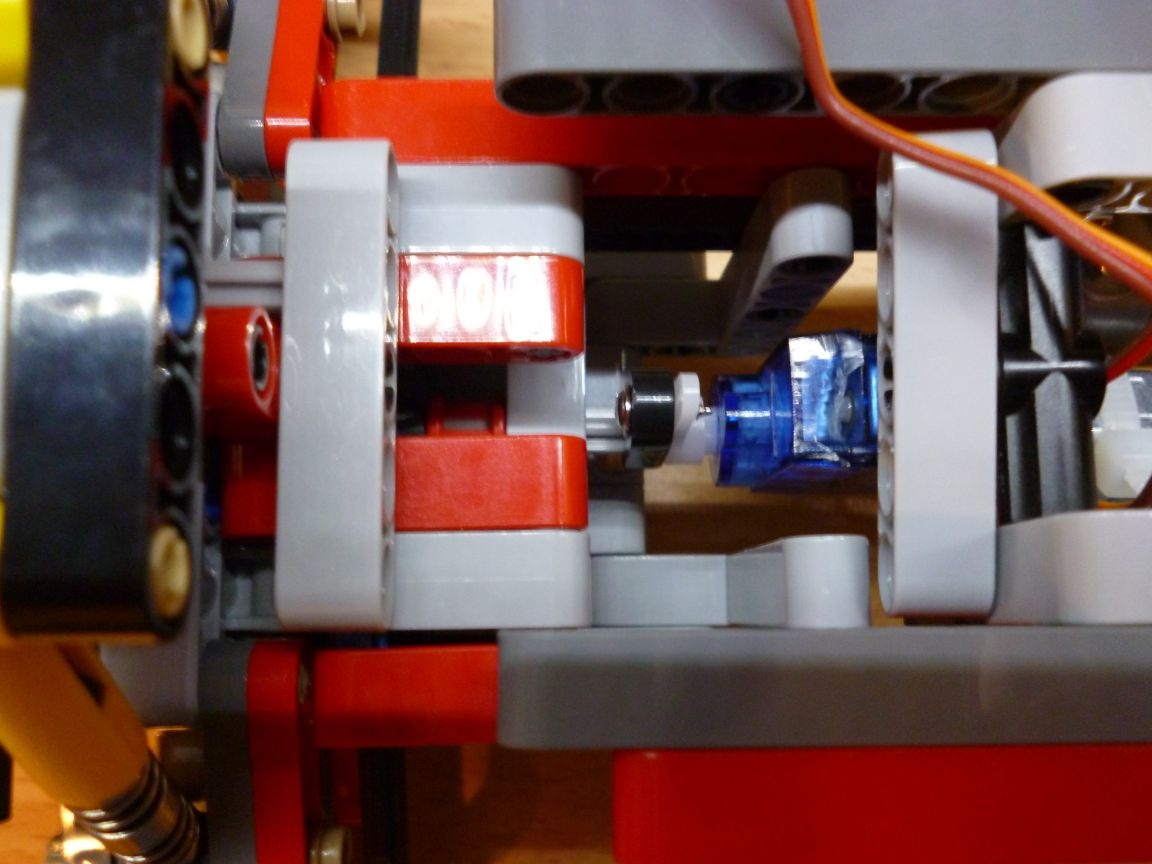
لقد قمت بحل مشكلة توصيل محرك التروس بأجزاء المصمم على النحو التالي: وضع على محور محرك التروس جلبة توصيل وإدخال قصاصة من المباراة لإصلاحها. لتركيب محرك التروس ، استخدم البلاستيك المعدني من مصمم حديد ومشبك.
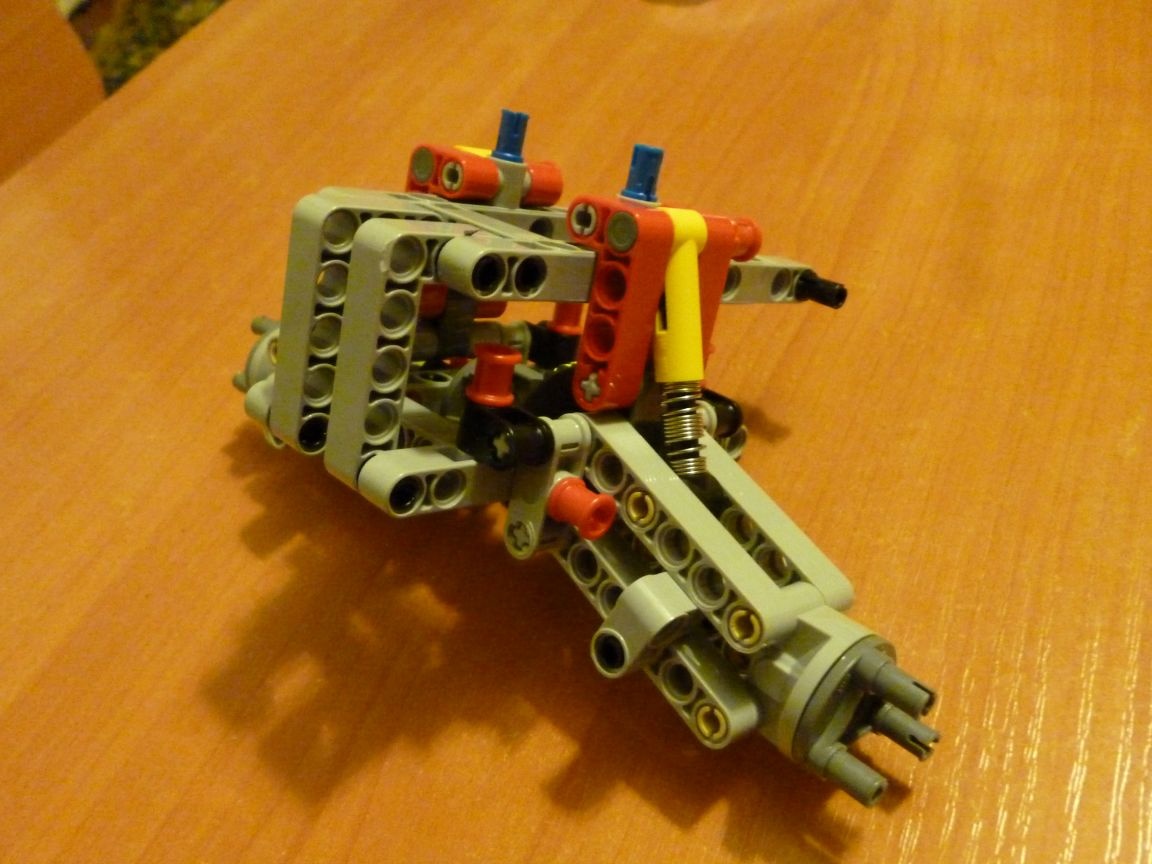
اتضح ما يلي:
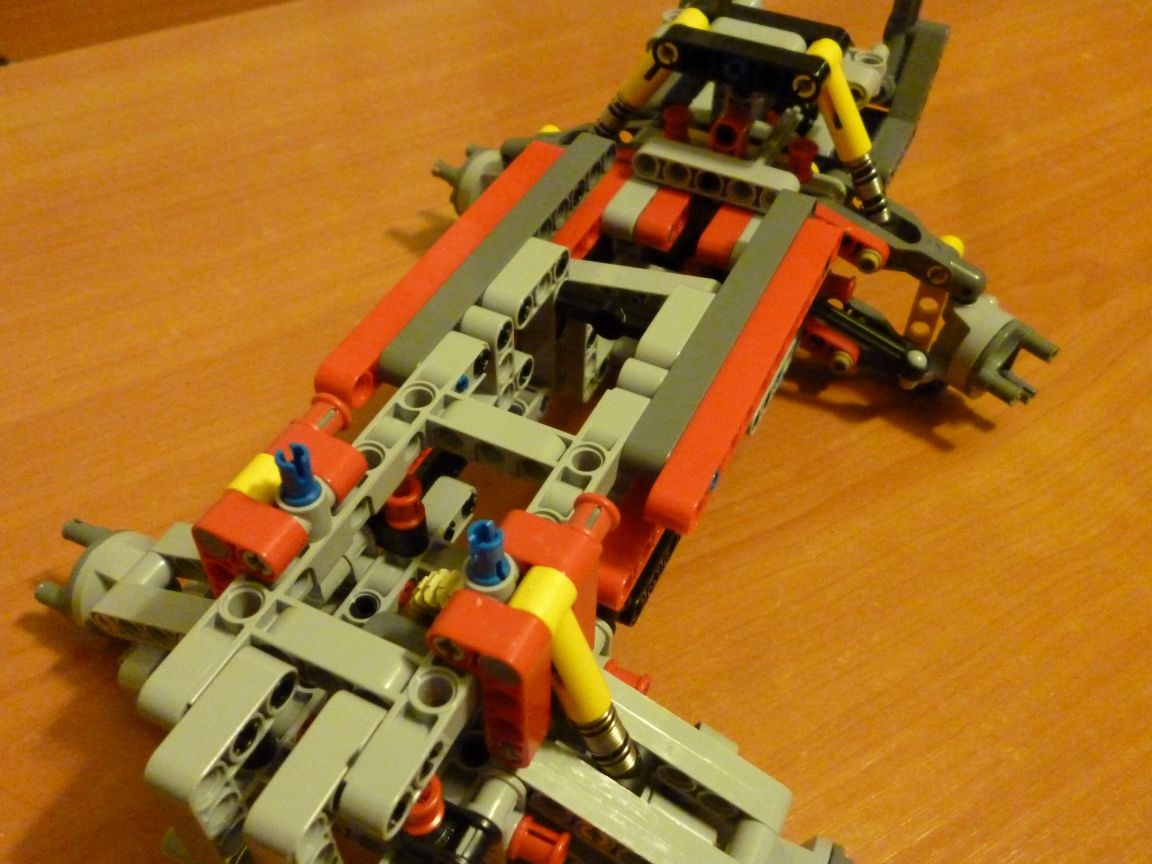
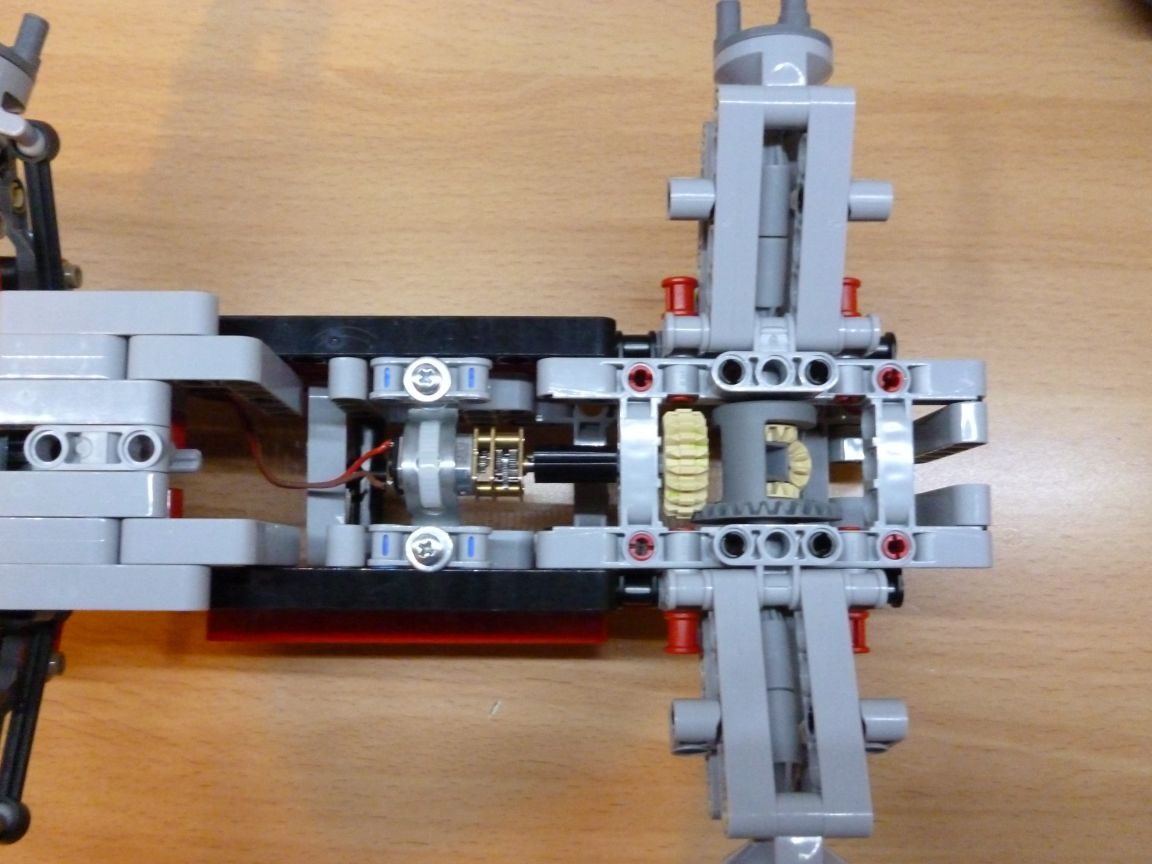
جبل على الهيكل:
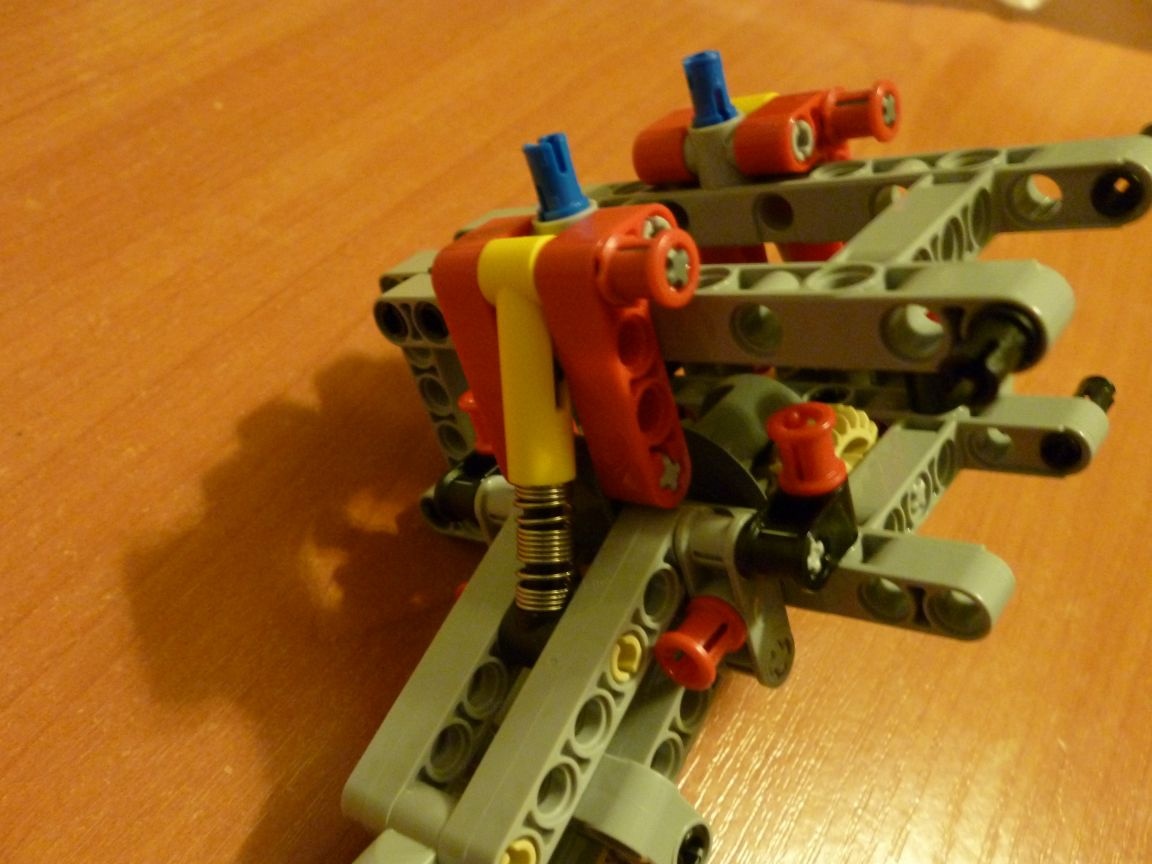
للقيام بالتناوب استغرق السيرفو SG-90. من الضروري الحفر بعناية ، حتى لا تلمس الأجزاء الداخلية ، من خلال ثقب بقطر 3.2 مم أو قطع بسكين القرطاسية. وكذلك قطع الأجزاء البارزة ("أجنحة" للتثبيت). نقوم بإدخال مسمار ملولب في الحفرة المصنوعة وإصلاحه بالمكسرات. على رمح المؤازرة نضع رافعة مع جزء مشدود من ليغو:
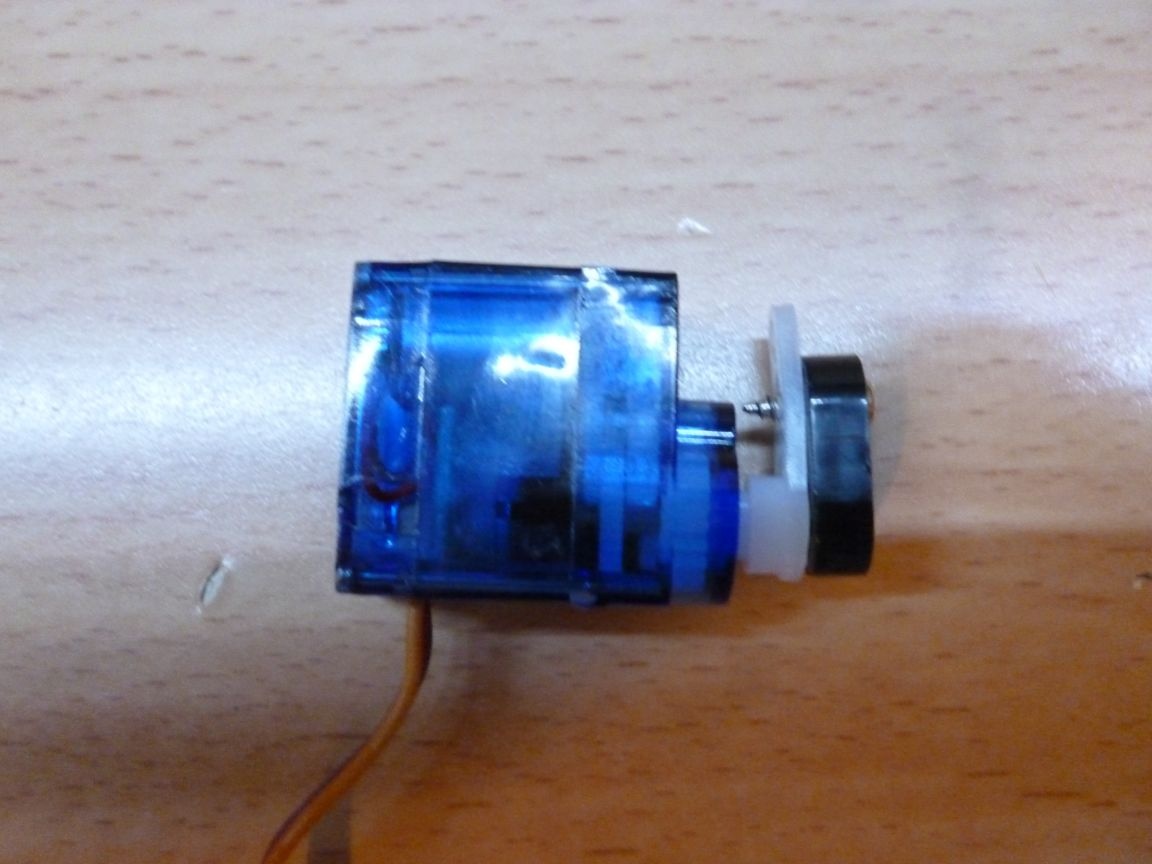
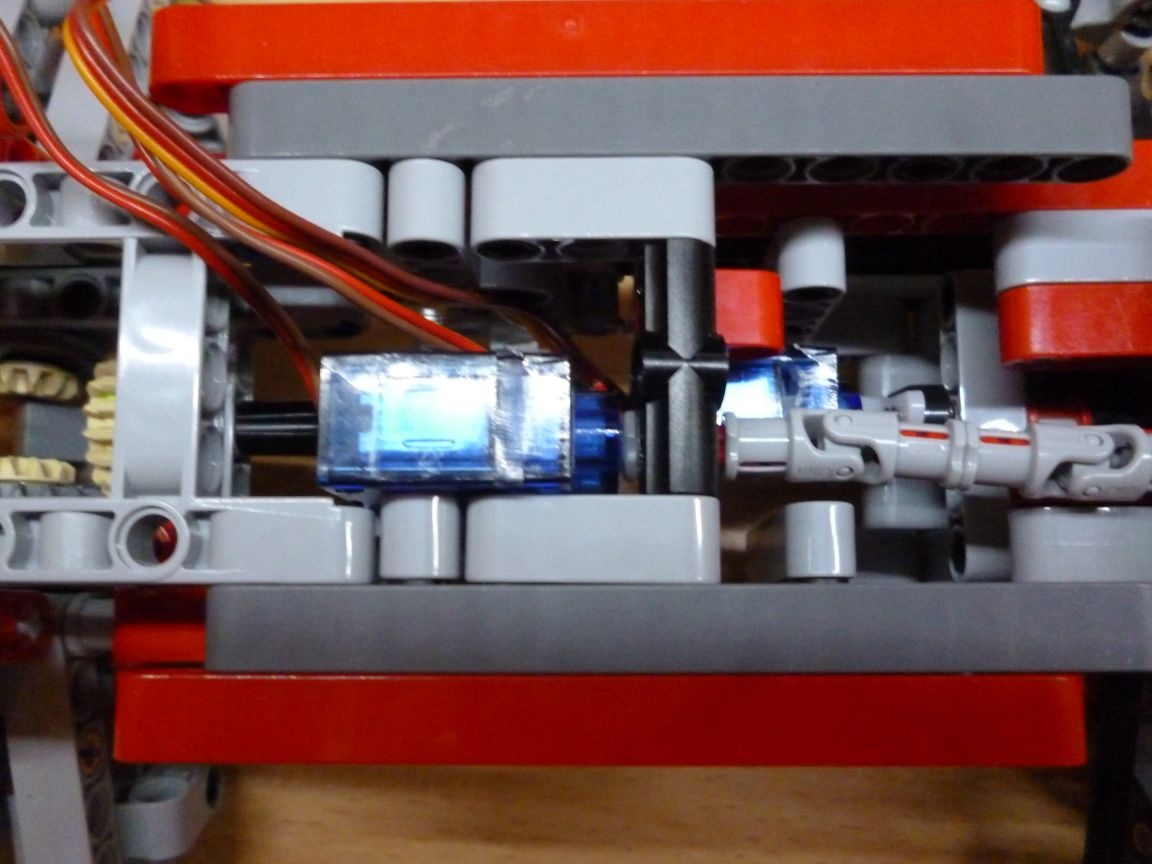
التثبيت:
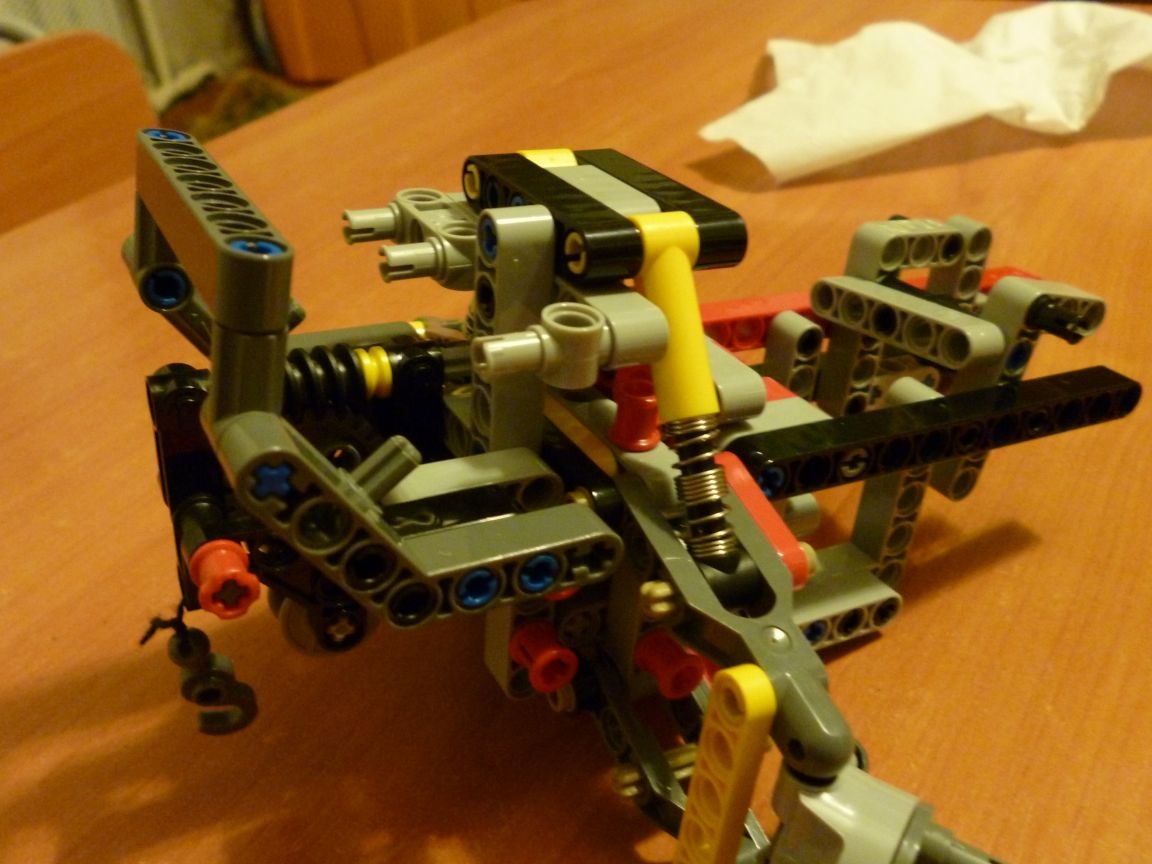
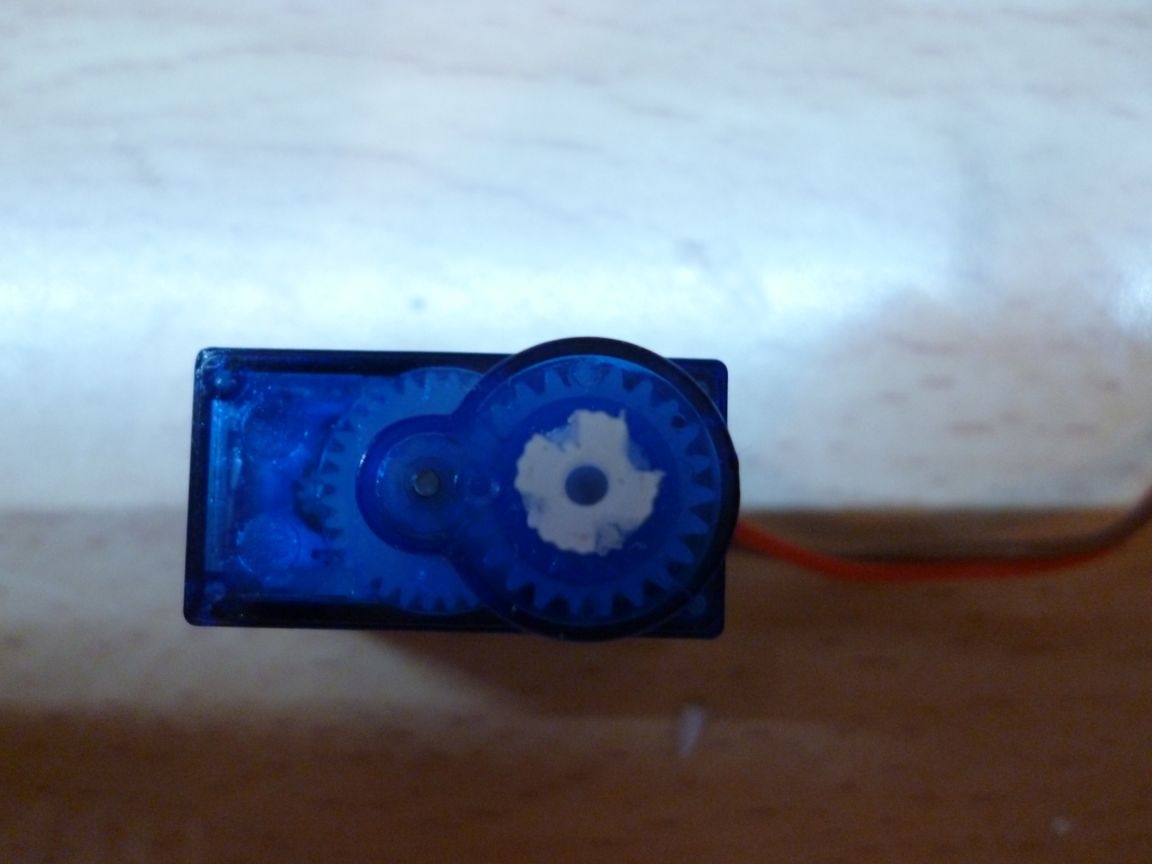
سوف نستخدم الماكينة الثانية للونش. نفعل نفس الشيء مع الأول. والآن ، يجب تحديثه بحيث يدور بحرية. للقيام بذلك ، نقوم بتفكيك محرك الأقراص المؤازر ، وإزالة اللوحة ولحام الأسلاك مباشرة إلى المحرك. نأخذ الترس الرئيسي ونقطع توقفه عن السفر.وأخيرًا ، نصنع فتحة بسكين كتابي على الترس الرئيسي كما في الصورة:
نقوم بتوصيل الونش الخاص بنا ووضعه على الهيكل:

الخطوة 4 إدارة وحدة التحكم
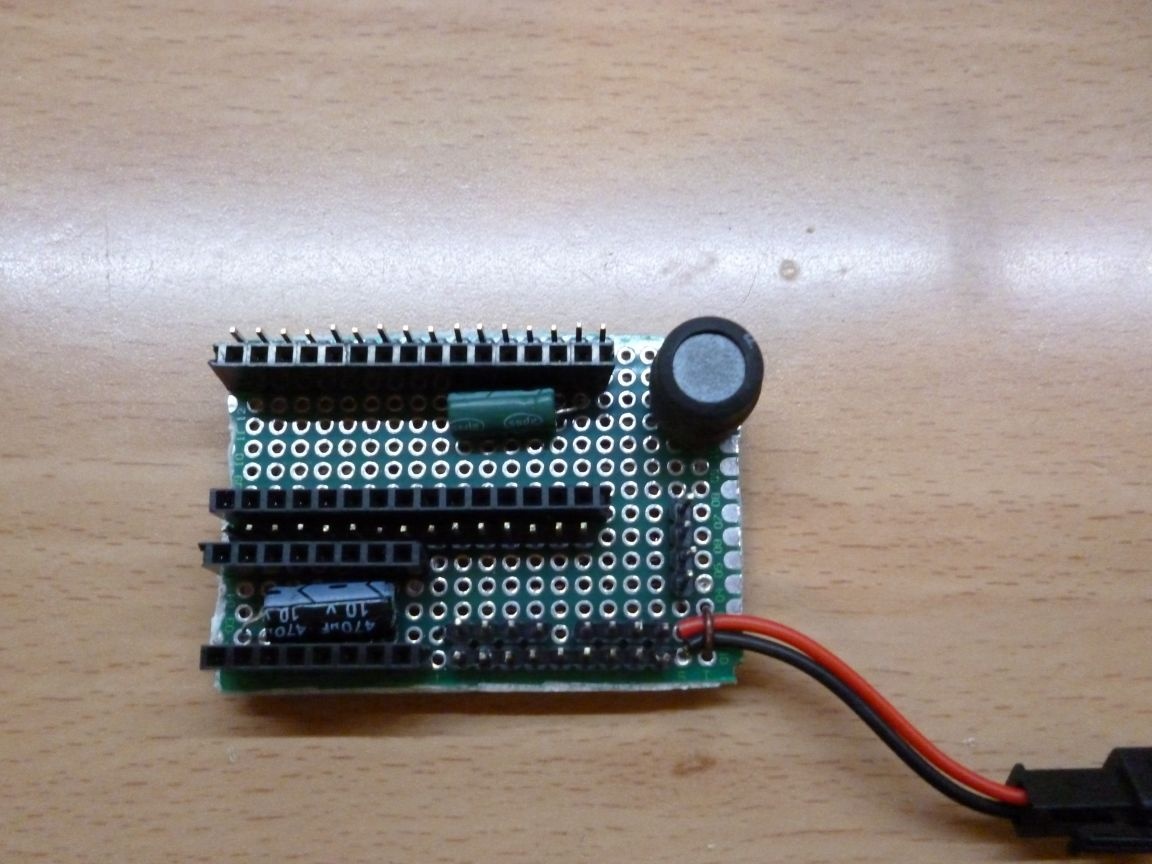
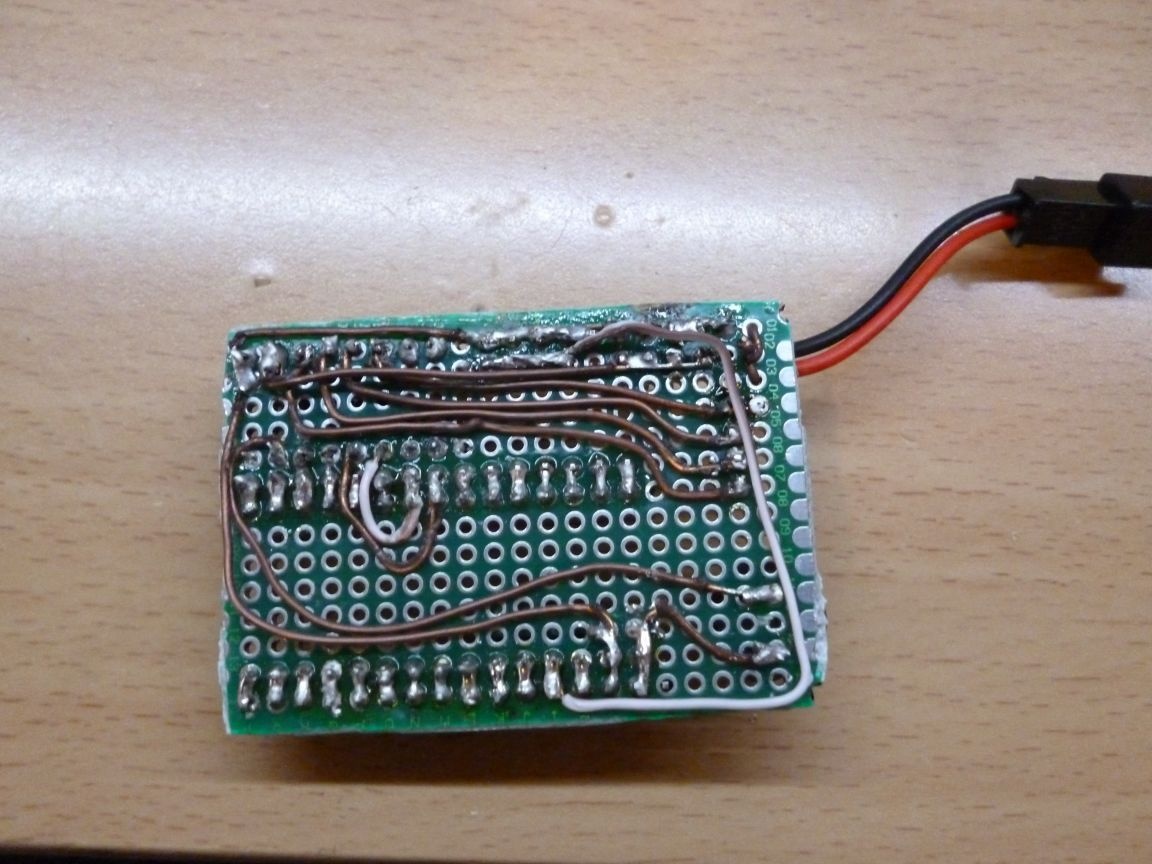
من أجل التحكم ، سنستخدم مستقبل Arduino و IR. نأخذ مكواة لحام ونجمع ما يلي على لوحة الدائرة:
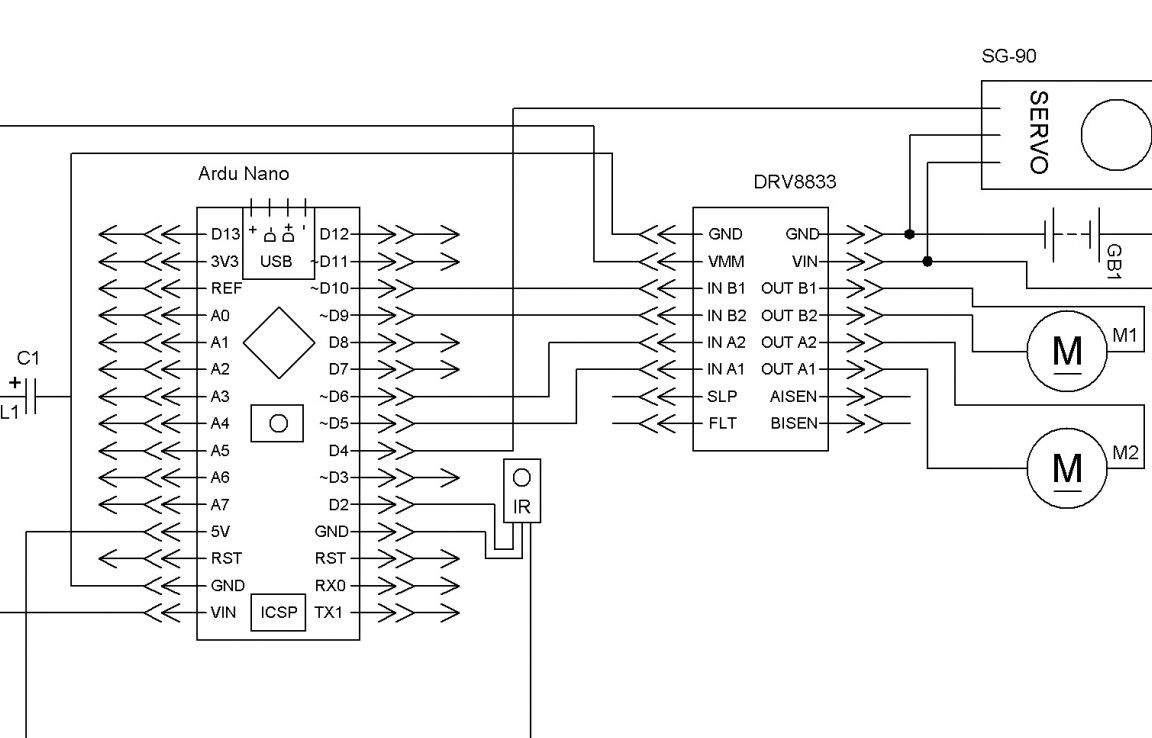
اشرح: أي مكثف منخفض الطاقة ، فإن ملف الحث ستجد أيضًا ، تحتاج إلى تثبيت جهد الميكروكونترولر. يتم اختيار المقاومات لمصابيح LED المستخدمة. يمكن أخذ جهاز استقبال الأشعة تحت الحمراء أو TSOP من لعبة قديمة ، أو شراؤها من متجر راديو. إذا كان هناك تداخل قوي ، فقم بإضافة مكثف إلى دائرة طاقة مستقبل IR.
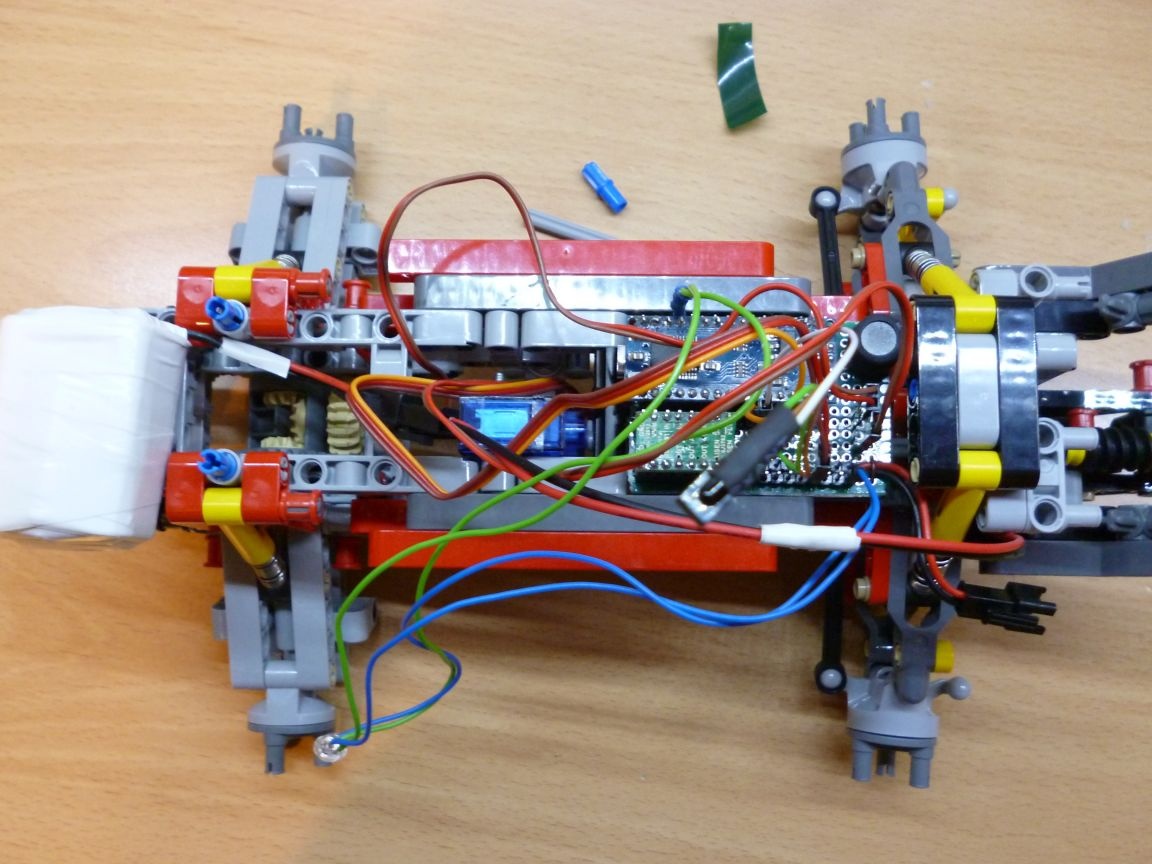
نتيجة لذلك ، نحصل على:
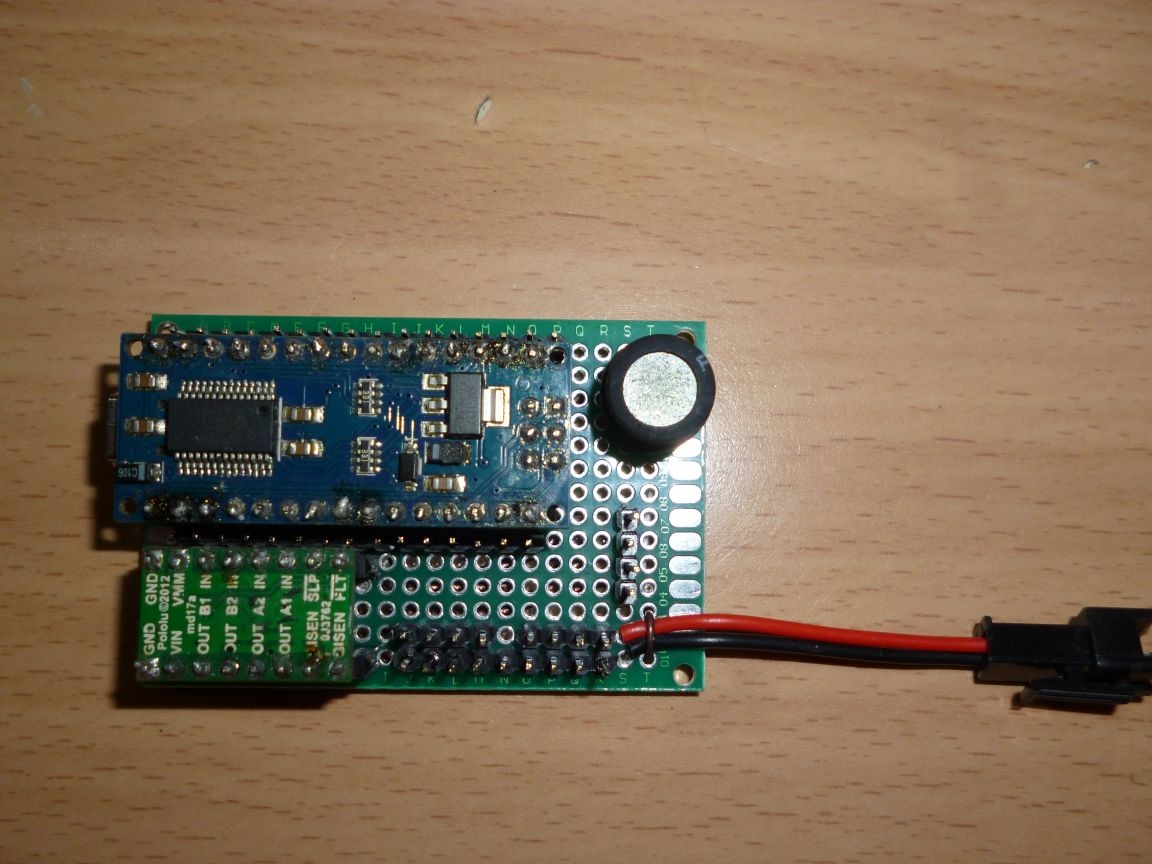
نقوم بتثبيت Arduino Nano و DRV 8833 في أماكنهم:
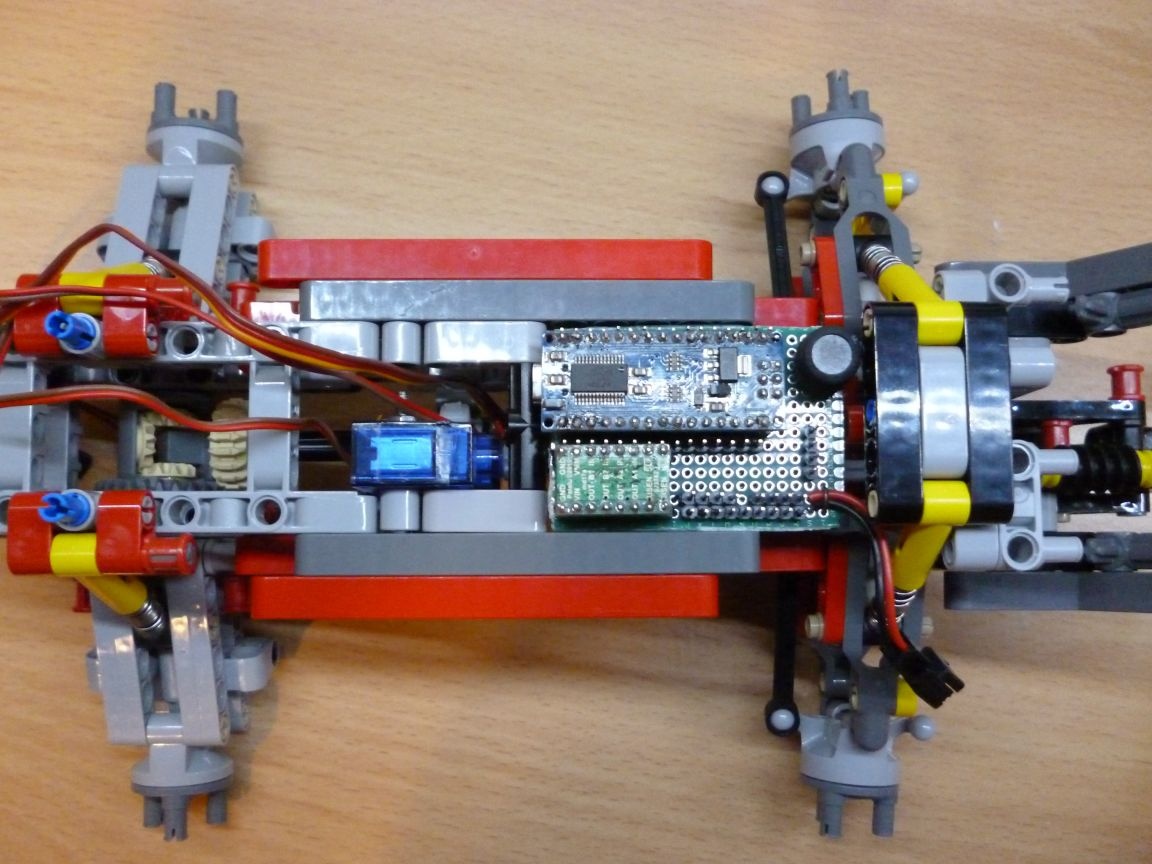
ووضع اللوحة على الهيكل:
مصدر الطاقة - 6 بطاريات Ni-Mn 1.2v 1000mA. من الضروري لحامها في سلسلة ولفها بشريط كهربائي. الغراء على الشريط على الوجهين في الجزء الخلفي من الهيكل.
نحن نربط هيكلنا بالكامل:
الخطوة 5 المقصورة
المقصورة هي ارتجالي شخصيًا ، ولا توجد تعليمات جاهزة ، لذلك تحتاج إلى جمعها من الصور الفوتوغرافية.



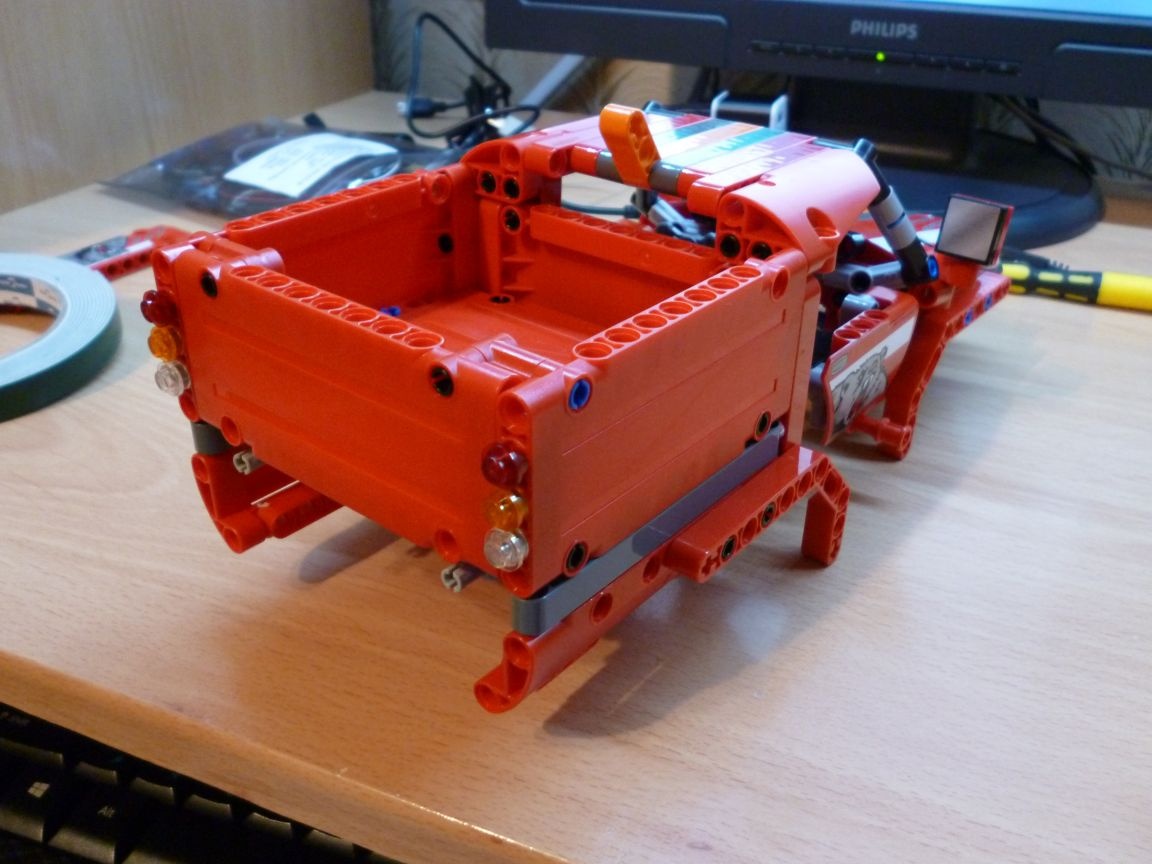
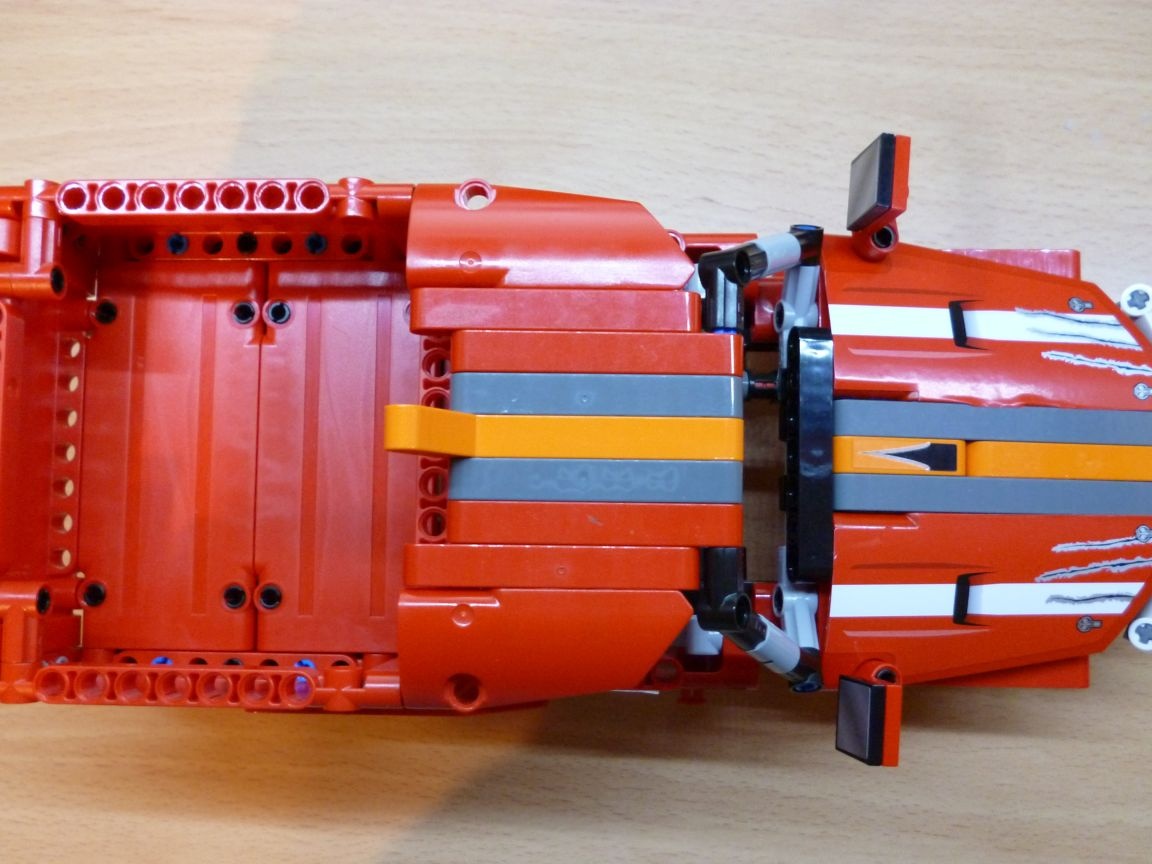
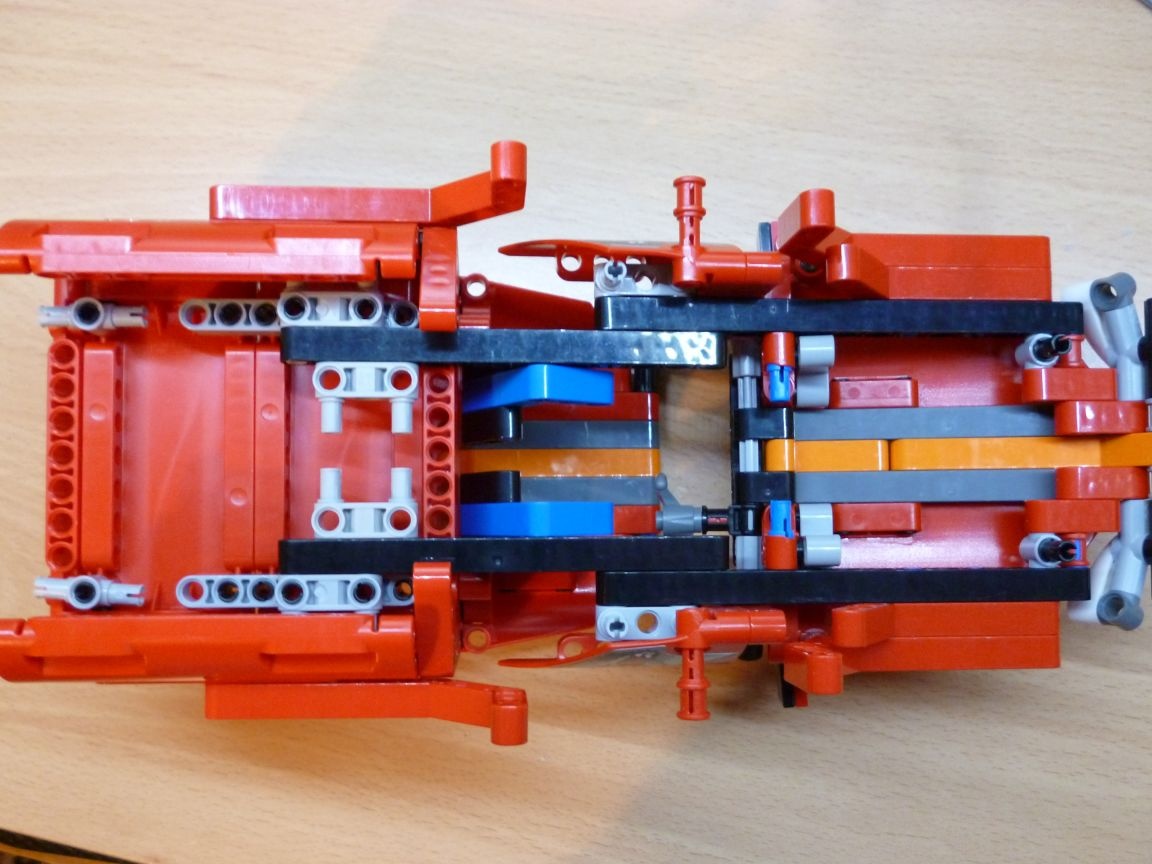
يمكنك تجميع نسختك الخاصة ، ما عليك سوى وضعها تحت الهيكل. الشيء الرئيسي هنا هو مطابقة التركيب مع الهيكل. يوجد أربعة منها ويمكن رؤيتها بوضوح في الصورة من أسفل الكابينة.
الخطوة 6 البرامج الثابتة.
اليوم ، وكما هو الحال دائمًا ، أبرمج في Arduino IDE. تحتاج أولاً إلى ملء البرامج الثابتة الخاصة بي ومن خلال نظرة طرفية على رموز التحكم عن بعد التي ستستخدمها. يمكنك أخذ أي جهاز تحكم عن بعد بالأشعة تحت الحمراء ، على سبيل المثال من جهاز تلفزيون أو مشغل DVD أو تجميع جهاز التحكم الخاص بك (لدي جهاز تحكم عن بعد محلي الصنع من عصا التحكم Sega). بالضغط على زر ، في المحطة سوف نرى رمز الزر المضغوط ، نكتبه على قطعة من الورق. نقوم بذلك مع جميع الأزرار التي نريد برمجة الإجراءات عليها. بعد ذلك ، قم بتحرير الرسم. نكتب رموزنا فيه لاتخاذ الإجراءات اللازمة ونعيد وميضه مرة أخرى. تم تكوين هذا البرنامج الثابت على جهاز التحكم عن بعد الخاص بجهاز Sega. في عملية اللعب مع الآلة ، لاحظت بعض الفروق الدقيقة أو المضايقات. من الصعب تحقيق استقبال موثوق لأوامر IR أثناء الحركة. ويحدث ذلك على النحو التالي: اضغط على السهم للأمام ، وتلقى الجهاز أمرًا بالذهاب ، وهرع للأمام ، وأطلق السهم ، ولكنه لم يتلق أمرًا بالتوقف ، ويستمر في القيادة حتى يتحطم أو يتعثر ، فهو محفوف بالعطل. جزئيًا ، يمكن حل هذه المشكلة عن طريق زيادة عدد مرات إعادة المحاولة لإرسال أمر ، ومع ذلك ، هذا ممكن فقط عند استخدام جهاز التحكم عن بعد بنفسك. لكنني سأختار حلًا أكثر جوهرية - سأتحول إلى استخدام جهاز استقبال - 433 ميجا هرتز - جهاز استقبال. سأكتب عن هذا في المقالة التالية.
الخطوة 7 وضعت على عجلات.
لذا ، علينا فقط أن نضع الكابينة على الشاسيه ، ونضع على العجلات ونتحقق من سيارات الدفع الرباعي لدينا في العمل.

