
هذا الروبوت يسيطر عليها الهاتف الذكي بلوتوث. يقيس مقياس التسارع للهاتف الذكي زاوية الهاتف إلى اليسار / اليمين ، لأعلى / لأسفل ، ويستخدم هذه البيانات لحساب سرعة المحركات الاتجاهية ، ويتم نقل البيانات عبر Bluetooth إلى اردوينو
ما تحتاجه لبناء روبوت.
Arduino uno ، وحدة بلوتوث HC-06 ، محركان تروس 300 دورة في الدقيقة 12 فولت ، H-Bridge L298N Dual H Bridge Motor Controller
12 إلى 1.3 ألف بطارية حمض الرصاص. يستهلك كل محرك 0.4A ، بالإضافة إلى استهلاك منطق السائق. أسلاك اردوينو وبطاريات 9 فولت العادية وموصل لتوصيل البطارية باردوينو. الأسلاك الكهربائية لتوصيل سائقي المحركات الكهربائية. كابل يو اس بي. هاتف يعمل بنظام Android الإصدار 4 والإصدارات الأحدث. 4 عجلات مطاطية دوارة 50 مم من Screwfix أو Toolstation ؛ محورين عالميين Lynxmotion HUB-02.










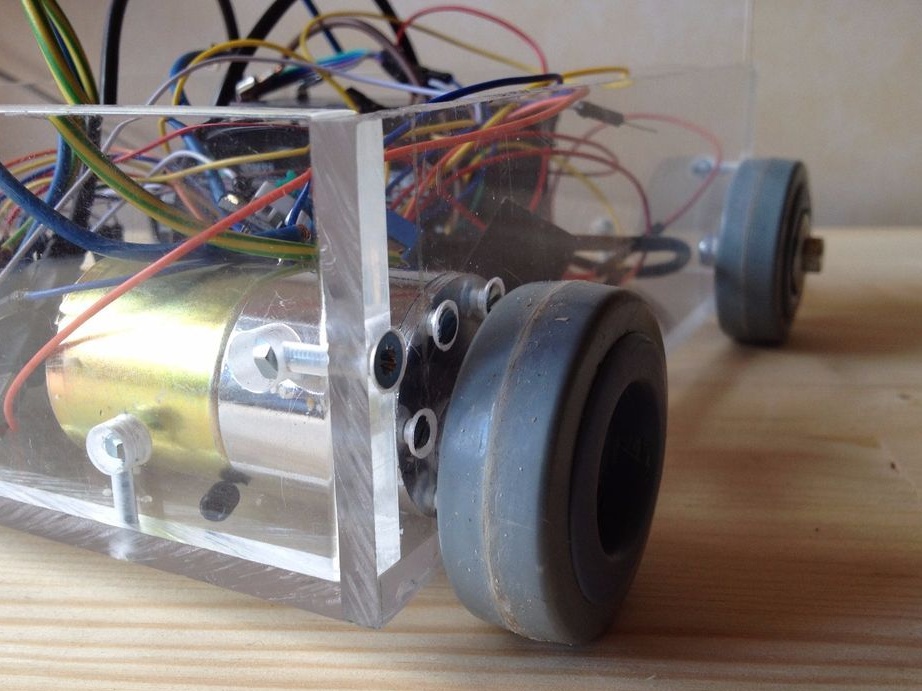
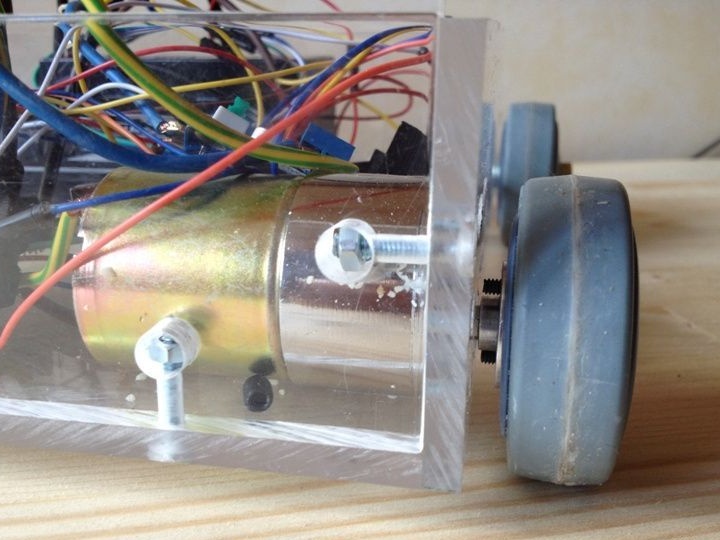
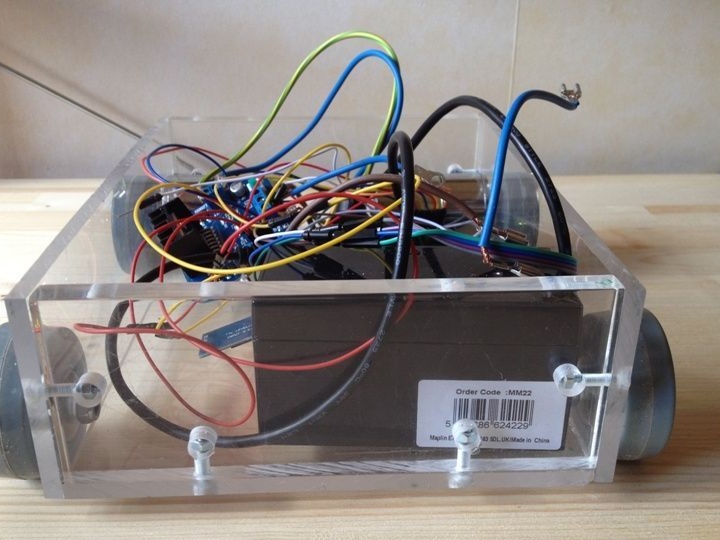
يتم تجميع العلبة من البلاستيك بطول 22 سم وعرض 17 سم. يجب توصيل محركين بالعمود وتثبيتهما بواسطة سن ملولب.
العجلات الأمامية
تتم إزالة المطاط من البكرات ويتم حفر فتحتين فيها وفقًا للفتحات الموجودة على المحاور. يتم تثبيت المحاور على المحاور التي تمر عبر السكن مع دبابيس ملولبة. بعد ذلك ، يتم تثبيت البكرات على المحاور ، ويتم وضع المطاط عليها.
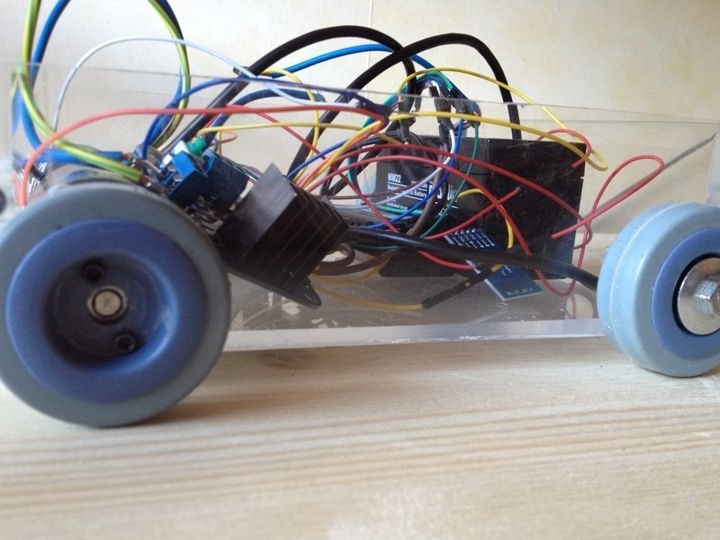
العجلات الخلفية
يتم فك العجلات الخلفية ببساطة من المفصلة وتثبيتها من خلال ثقوب محفورة في السكن.
التوصيلات الكهربائية.
ستكون هناك مشاكل في تحميل رمز البرنامج في Arduino. هذا يرجع إلى حقيقة أن وحدة Bluetooth ، جهات اتصال RX \ TX الخاصة بها ، متصلة بدبابيس Arduino 1 و 2 ، والتي يتم استخدامها أيضًا لنقل البيانات عبر USB. من الضروري تغيير جهات الاتصال 1 و 2 إلى 11 و 12 في المكتبة المتصلة ، والتي سيتم استخدامها لنقل البيانات.
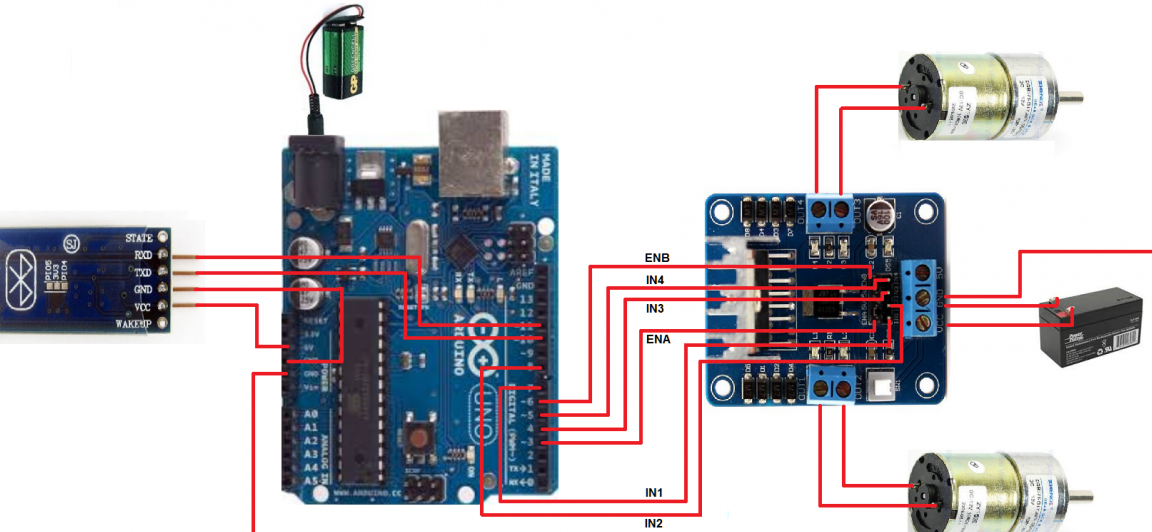
لا يحتاج سائق المحرك إلى مصدر طاقة منفصل للمنطق. 12V كافية لتشغيل منطق السائق والمحرك نفسه. يجب توصيل ناقص البطارية مع كل من Arduino وسائق المحرك. يمكن ربط اتصالات سائق المحرك ECA / 5V و ENB / 5V. يجب إزالته قبل الاتصال بـ Arduino. لا ينبغي توصيل أي شيء بدبابيس 5V.
كود أندرويد.
يجب تفكيك الملف المرفق واستيراده إلى Android Studio ، وحزمه في ملف apk وتثبيته على الهاتف.
الملفات الرئيسية:
نشاط الأجهزة المقترنة:
deviceList.java
Activity_device_list.xml
نشاط LED والتحكم في الحركة:
ledControl.java
Activity_led_control.xml
بيان:
AndroidManifest.xml
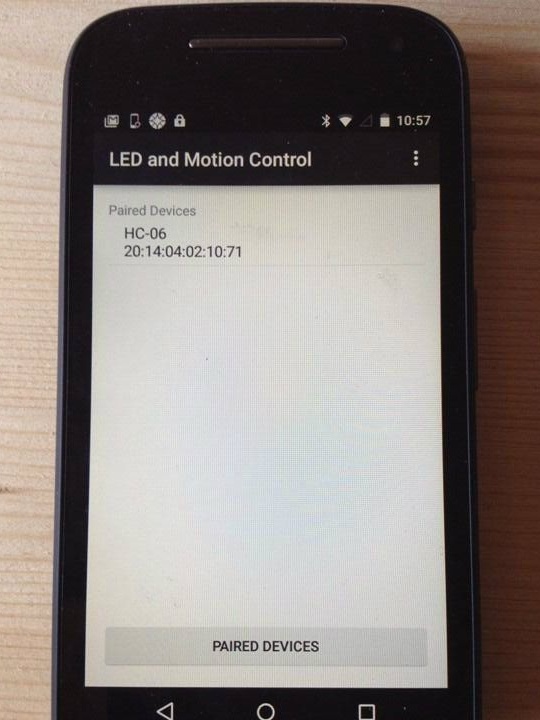
يُظهر نشاط الأجهزة المقترنة أجهزة Bluetooth المتوفرة. بمجرد توصيل الأجهزة ، يتم نقل التحكم إلى LED ونشاط التحكم في الحركة.
ترسل أزرار التشغيل / الإيقاف رسالة "تشغيل" أو "إيقاف تشغيل" إلى Arduino ، مما يؤدي إلى تشغيل مصباح LED المدمج أو إيقافه. يتحكم مقياس تسارع الهاتف في الحركة ، التي تنقل قيم x / y من المستشعر ، في كل مرة تتغير هذه القيم. بناءً على ذلك ، يحسب Arduino سرعة واتجاه دوران المحركات في النطاق من 0 إلى 255. وهو ينقل قيم Arduino هذه في شكل "L-255:" أو "R100" ، إلخ. بناءً على ذلك ، يرسل Arduino أوامر سرعة الدوران للمحرك الأيسر إلى ENA ، والأمر الأيمن إلى ENB ويغير اتجاه الدوران عن طريق تغيير القطبية إلى IN1 و IN2 لليسار و N3 و N4 للمحرك الأيمن.