
خصوصية الروبوت BIBOT-1 هو أنه يمكن أن يؤدي مهمتين. يمكن أن تتحرك خلف مصدر ضوء أو على طول خط أسود يمكن رسمه على الورق. الروبوت مرنة للغاية في الإعدادات ، أي أنه يمكن تخصيصها لاحقًا لأي ظروف مطلوبة ، أي لجعلها أكثر حساسية للضوء أو أقل. من الممكن أيضًا ضبط سرعة دوران المحركات ، وهذا سيسمح للروبوت بالعمل بشكل أفضل ، خاصة عند التحرك على طول الخط.

الجهاز ومبدأ الروبوت:
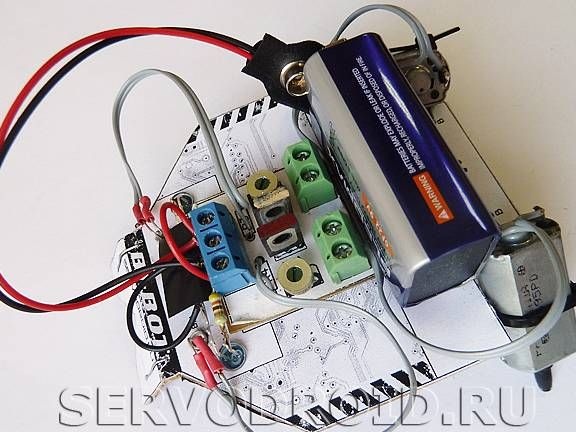
قاعدة الروبوت مصنوعة من الورق المقوى ، وطبع القالب على الطابعة ، ومن ثم تعطل. أما بالنسبة لوحدة المكونات الراديوية ، فقد تم أخذ قطعة القماش كأساس لها ، وتم إرفاق الوحدة بقاعدة الروبوت. لجعل الجسم أكثر صلابة ، يتم استخدام أضلاعه الخاصة في التصميم.
يتم تثبيت المحركات كما هو الحال في معظم هذه محلية الصنع، أي بزاوية. ونتيجة لذلك ، ليست هناك حاجة لوضع العجلات وعلبة التروس. لمنع انزلاق الأعمدة على السطح ، يتم وضع واقيات عليها.
يتم استخدام بطارية 9 فولت من النوع 6F22 كمصدر للطاقة. البطارية مرفقة بشريط وهي متاحة دائمًا لسهولة الاستبدال.
أما بالنسبة للمفتاح ، ثم السيارات قررت تجنب تثبيته. يتم تشغيل الروبوت وإيقاف تشغيله عن طريق معالجة المقطع المرفق بالبطارية.
وأخيرًا ، تعديل الروبوت. لضبط حساسية الروبوت ، يحتوي النظام على مقاومين للضبط. عندما تدور ، يمكنك ضبط حساسية الروبوت للضوء ، ويمكنك أيضًا ضبط سرعة دوران المحركات. كلما كان الروبوت أكثر حساسية للضوء ، كلما كان أسرع في التحرك ، والعكس بالعكس.
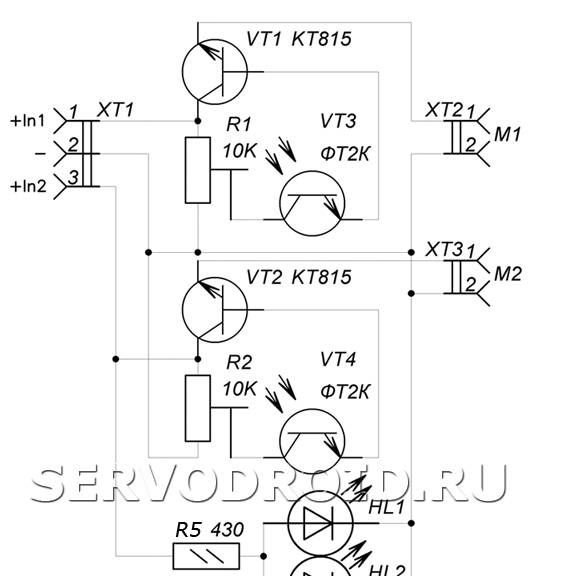
بالنسبة لمبدأ التشغيل ، يتم تحديد كل شيء في الرسم التخطيطي.
المواد والأدوات:
- بطارية 9V ومقطع للاتصال ؛
- اثنان من الموصلات لتوصيل المحركات (كتل طرفية من قسمين) ؛
- المحركات ؛
- ذراع تسوية النايلون ؛
- حامي (الأسطوانة المطاطية) ؛
- اثنان من الترانزستورات الضوئية ؛
- اثنان من مصابيح LED بالأشعة تحت الحمراء ؛
- قوس من دباسة ؛
- فدرة طرفية من ثلاثة أقسام لتوصيل مصدر الطاقة ؛
- مقاوم الضبط.

عملية التصنيع:
الخطوة الأولى. تصميم ثنائي الفينيل متعدد الكلور
يتم إنشاء الرسوم بطريقة LUT. قبل العمل ، يجب تنظيف سطح الألياف الزجاجية جيدًا ، ثم غسله وتجفيفه تمامًا. بعد التصنيع ، يجب فحص المسارات الموصلة بمقياس متعدد لدائرة كهربائية قصيرة.
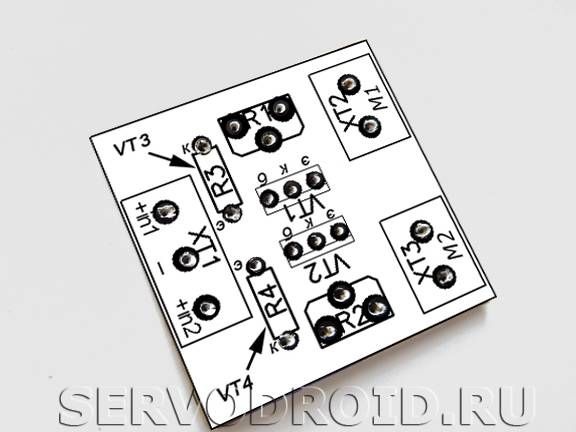
الخطوة الثانية التثبيت إلكتروني العناصر
بعد ذلك ، تحتاج إلى أخذ رسم مطبوع على الورق وإلصاقه على اللوحة التي تم إنشاؤها. في هذه الحالة ، يجب أن تتطابق تمامًا الفتحات الموجودة على الورق وفي ثنائي الفينيل متعدد الكلور. بعد ذلك ، يتم تثبيت مكونات الراديو كما هو موضح في الرسم التخطيطي. في عملية العمل ، يحتاج تركيب المقاومات R3 و R4 إلى تثبيت الترانزستورات الضوئية VT3 و VT4.
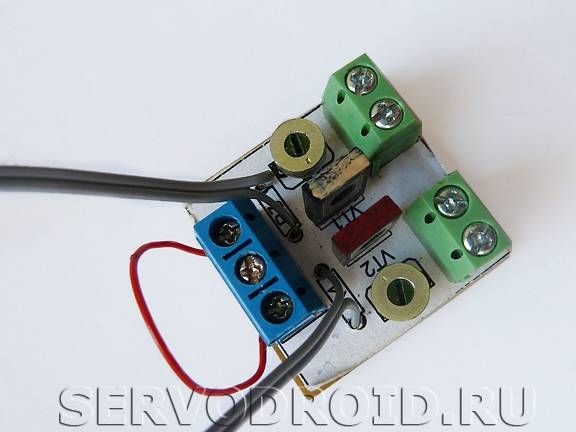
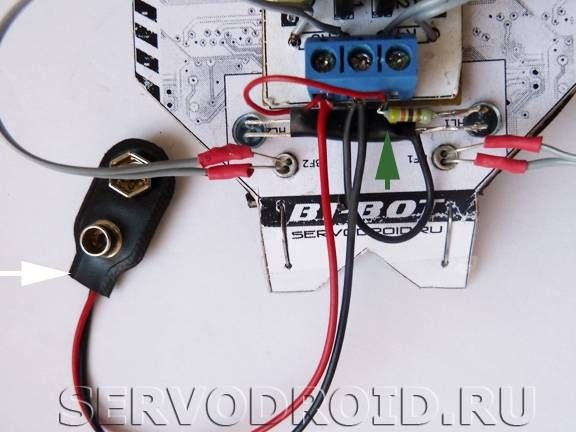
يجب توصيل الأجزاء المتطرفة للكتلة الطرفية ثلاثية الأقسام XT1 بسلك التثبيت. يجب أن تكون نقاط اتصال جهات الاتصال معزولة جيدًا ، فمن الأفضل استخدام أنبوب الانكماش الحراري لهذه الأغراض.
الخطوة الثالثة كيفية إنشاء قضية
يجب طباعة رسم الجسم على ورقة عادية من ورق A4. بعد ذلك ، تحتاج إلى أخذ قطعة من الورق المقوى المموج ولصق رسم عليها ، وبالتالي يجب قطع العلبة حول المحيط.
حيث يقع الرسم التخطيطي "المقص" على طول خطوط جريئة ، يجب إجراء التخفيضات. بعد ذلك ، على طول الخطوط المنقطة السوداء ، تحتاج إلى ثني الورق المقوى كما في الصورة ووضع الأسهم السوداء.



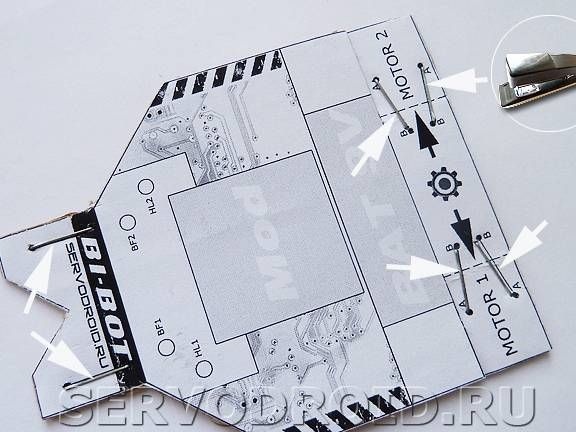


أمام وخلف السكن إلى الموضع المحدد باستخدام دباسة ، تحتاج إلى تثبيت الأقواس. تتميز أماكن تركيبها بخطوط سوداء مع دوائر. هناك حاجة إلى الدبابيس لجعل الإطار أكثر صلابة. بعد تثبيت الأقواس ، يكون مملاً الانحناء على طول خطوط الطي.
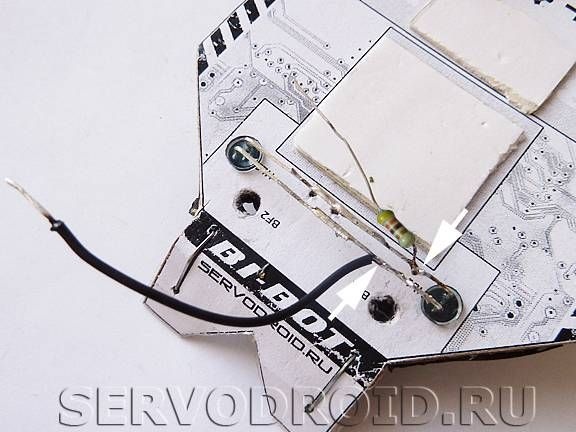
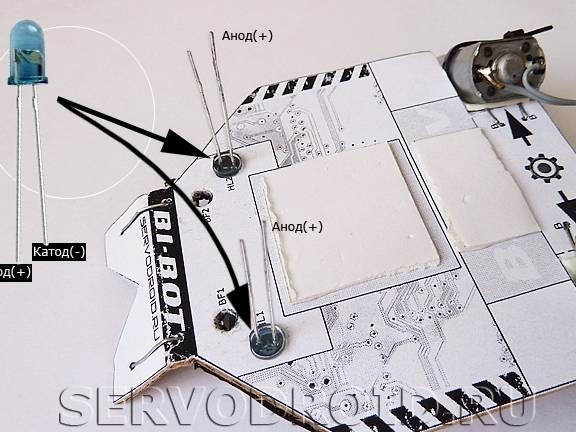
في الأماكن التي تحمل علامة BF1 ، BF2 ، تحتاج إلى عمل ثقوب لتركيب الترانزستورات الضوئية. في الأماكن HL1 ، HL2 ، تحتاج إلى عمل ثقوب بمثل هذا الحجم الذي يتناسب مع قطر غلاف مصابيح LED بالأشعة تحت الحمراء.
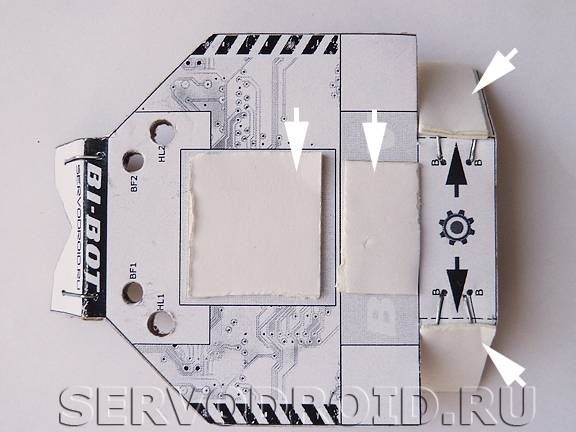
في الأماكن المصنفة على أنها Mod "و" BAT 9V "و" MOTOR 1 "و" MOTOR 2 "، ثبت على شرائط الشريط على الوجهين.
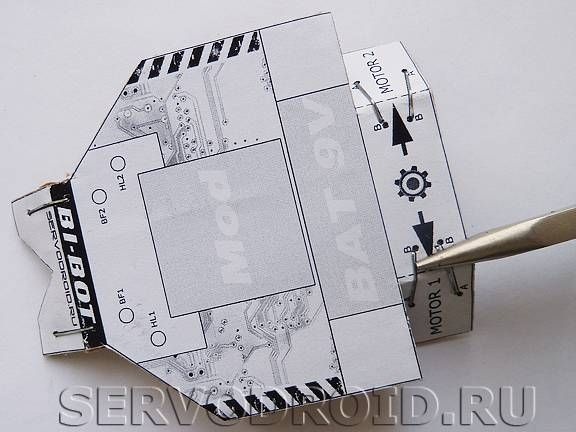
الخطوة الرابعة تركيب المحركات
يتم تركيب المحركات في موضعها برباط من النايلون. حتى لا تنزلق الأعمدة ، يجب وضعها على الواقيات. وهي مصنوعة من الأربطة المطاطية الموجودة في قضبان الهيليوم من الأقلام. في نفس المرحلة ، قم بلحام الأسلاك للمحركات.


الخطوة الخامسة تركيب مصابيح LED بالأشعة تحت الحمراء
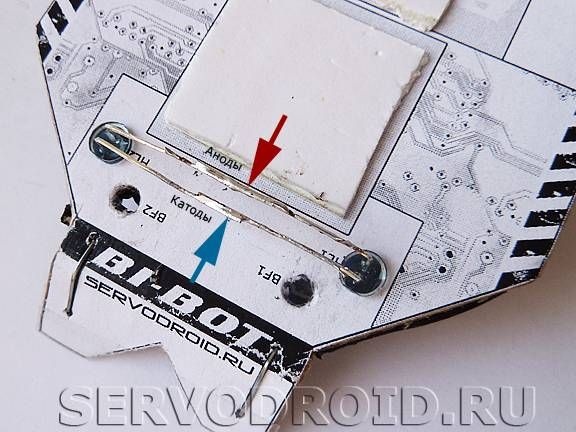
عند تثبيت مصابيح LED بالأشعة تحت الحمراء ، من المهم عدم الخلط بين استنتاجاتها ، بالنسبة للعناصر المستوردة ، فإن جهة الاتصال الطويلة هي أنود ، أي زائد. يتم تثبيت مصابيح LED في المواضع HL1 و HL2 كما هو موضح في الصورة. النتائج عازمة بحيث يمكن توصيل الثنائيات بالتوازي.
يجب لحام المقاوم 430 أوم إلى الاتصال الإيجابي لمصابيح LED ، وسلك أسود إلى الاتصال السلبي.
يجب توصيل الطرف الآخر من السلك الأسود بالدبوس المركزي للكتلة الطرفية المكونة من ثلاثة أقسام. أما بالنسبة لخرج المقاوم ، فهو متصل بطرف كتلة المحطة.
الخطوة السادسة مرحلة البناء النهائي
لكي يتحرك الروبوت على طول الخط ، يتم وضع الترانزستورات الضوئية في مكانها BF1 ، BF2 كما في الصورة.
يتم وضع الترانزستورات للحركة خلف مصدر الضوء على الجانب الخلفي.
في الختام ، يتم توصيل المحركات ، ويتم وضع البطارية.


هذا كل شيء ، الروبوت جاهز. الآن يمكنك محاولة تشغيله وتكوينه وفقًا للظروف المطلوبة.