

تسمى Pultoids مثل هذه الروبوتات التي يمكن التحكم فيها عن بعد باستخدام جهاز التحكم عن بعد. على سبيل المثال ، يمكن استخدام جهاز تحكم عن بُعد للتلفزيون لهذه الأغراض. المهمة الرئيسية التي وضعها المؤلف لنفسه في تصنيع مثل هذا الروبوت هي بساطة تجميعه. يعتبر الروبوت لا يتطلب تصنيع لوحة الدوائر المطبوعة ، التثبيت بسيط للغاية ويحدث فقط على الورق المقوى.

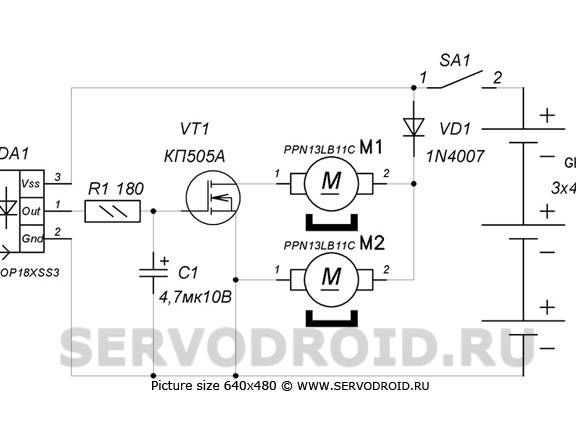
إلكتروني تتكون دائرة الروبوت من أربعة مكونات فقط: الصمام الثنائي والترانزستور والكاشف الضوئي والمكثف. لتصنيع الجزء الميكانيكي ، ستحتاج أيضًا إلى حد أدنى من المواد ، على سبيل المثال ، يتم استخدام قرص مضغوط لصنع الحالة.
الروبوت المصنوع بهذه الطريقة سيفهم فريق واحد فقط. يجدر الضغط على أي زر في لوحة التحكم وسيبدأ الروبوت في الدوران. إذا واصلت الضغط على الزر ، فستصبح زاوية الدوران أكبر ، ونتيجة لذلك ، يمكن للروبوت أن يدور 360 درجة.
جهاز روبوت
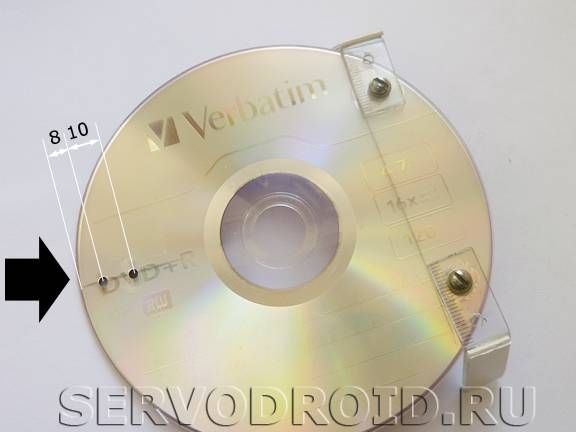
يتم استخدام القرص المضغوط كأساس لتصنيع الروبوت. بالنسبة لعناصر الطاقة ، يتم إرفاقها باستخدام مسامير M2. يتم إرفاق اللوحة الإلكترونية ، وكذلك حجرة البطارية ، باستخدام الشريط.
الآن حول المحركات ، فهي تقع بزاوية وتستند أعمدةها على الطريق. وبالتالي ، ليست هناك حاجة لتصنيع العجلات بشكل منفصل. يتم تثبيت البراغي باستخدام إطارات مصنوعة من خط المدرسة.
ثلاث بطاريات "إصبع صغير" تغذي الروبوت ، ويتم تركيبها في حالة خاصة. في المجموع ، ينتج مصدر الطاقة 4.5 فولت.
وأخيرًا ، جهاز الكشف الضوئي ، إنه واحد فقط هنا ، إنه نوع من TSOP. يتلقى إشارات معدلة من أي جهاز تحكم عن بعد ، بفضله يمكن التحكم في الروبوت.
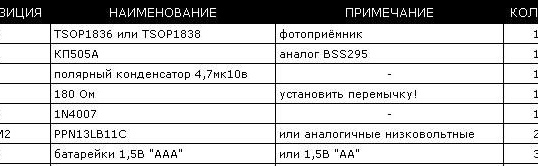
مواد وأدوات التصنيع:
- العلاقات النايلون ؛
- كاشف ضوئي من نوع TSOP1836 ؛
- ترانزستور تأثير مجال واحد (KP505A) ؛
- قرص مضغوط ؛
- fular للبطاريات في ثلاثة أقسام ؛
- ثلاث بطاريات "صغيرة" ؛
- مسطرة بلاستيكية ؛
- مسامير لتثبيت الإطار ؛
- الأسلاك والتبديل (النوع المتقاطع).
عملية التصنيع:
الخطوة الأولى. تصميم ثنائي الفينيل متعدد الكلور
لإنشاء لوحة دوائر مطبوعة ، تحتاج أولاً إلى طباعة رسم على الورق. يجب أن تحصل على صورتين ، على رسم تثبيت واحد ، وعلى الجانب الآخر من اللوحة. في المجموع ، ستتكون اللوحة من ثلاثة عناصر ، في الوسط سيكون هناك كرتون مموج ملصوق بورق مكتبي على كلا الجانبين. لصق اللوح ، يوصى باستخدام عصا الغراء الجاف.
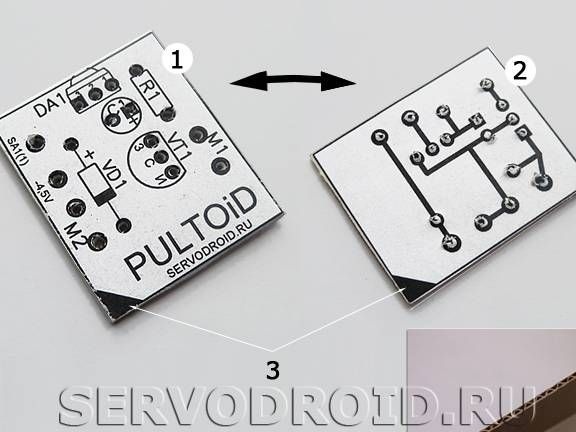
الخطوة الثانية تركيب المكونات الراديوية
عند تثبيت المكونات الإلكترونية ، من المهم عدم نسيان أو قطع الحواف البارزة لجهات الاتصال. في وقت لاحق ، سيتم ثنيهم ، وبالتالي سيتم إنشاء دائرة كهربائية. يتم توصيل جميع العناصر عن طريق اللحام وفقًا للمخطط المحدد.
يجب استبدال المقاوم R1 في الدائرة بأي رابط. أما بالنسبة للكاشف الضوئي ، فإن الترتيب الصحيح لاتصاله يظهر أيضًا في الصورة.

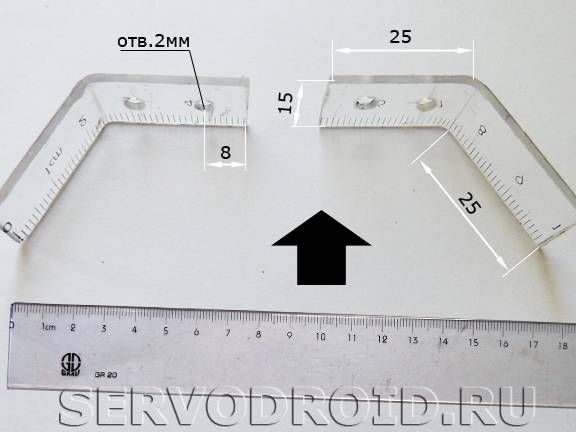
الخطوة الثالثة تركيب إطار الطاقة
لتثبيت المحركات ، ستحتاج إلى إنشاء إطار طاقة. كمادة ، سيتم استخدام مسطرة مدرسة البلاستيك هنا. يجب أن يتم تقطيعه إلى قسمين وأن يكون مثنيًا كما هو موضح في الصورة. لجعل المسطرة تبدأ في الانحناء ، تحتاج إلى إحضار طرف لحام الحديد الساخن إلى مكان انحراف على مسافة حوالي 2 مم. لهذه الأغراض أيضًا ، يمكنك استخدام مجفف شعر للبناء. يحتاج المسطرة إلى الانحناء بسلاسة بزاوية حوالي 30 درجة.

بعد إنشاء الإطار ، يمكنك متابعة التثبيت. للقيام بذلك ، خذ القرص المضغوط ومسامير 2 مم مع الصواميل. علاوة على ذلك ، يتم حفر ثقوب بقطر لا يقل عن مليمترين في الأماكن المناسبة ، ويتم إصلاح الإطار بمسامير. لكي لا ينزلق الإطار ، قبل تثبيته ، تحتاج إلى لصق شريط مزدوج الوجه على القرص.
الخطوة الرابعة تثبيت الدعم الأمامي
في الجزء الأمامي من القرص ، تحتاج إلى حفر فتحتين وإعداد ذراع التسوية النايلون. يجب أن يكون حجم ذراع التسوية 3x150mm. يجب إدخاله كما هو موضح في الصورة. ونتيجة لذلك ، سينخفض الدعم الناتج تمامًا عندما يعمل الروبوت وينزلق على طول الطريق.


الخطوة الخامسة تركيب المحرك
من أجل منع انزلاق مهاوي المحرك على طول الطريق ، يجب وضع واقيات عليها. وهي مصنوعة من اللثة ، والتي يمكن العثور عليها في معاجين أقلام الهيليوم. لتثبيت المحركات ، تحتاج أولاً إلى لصق قطعة من الشريط على الوجهين للدعم ، وسوف يمنع الانزلاق. حسنًا ، يتم إصلاح المحركات أخيرًا بعلاقات من النايلون.

الخطوة السادسة التبديل وتوصيل التيار الكهربائي
كمصدر للطاقة ، يمكنك استخدام أي بطارية لا يتجاوز تيارها 5 فولت. في هذه الحالة ، يتم استخدام علبة لثلاث بطاريات أصابع ، يبلغ مجموعها 4.5 فولت.
أما بالنسبة للمفتاح ، فهو مثبت على فجوة الاتصال الإيجابي القادم من مصدر الطاقة. يتم إرفاق السلك الأحمر باللوحة من أجل دبوس SA1 (1) ، والسلك الأسود إلى دبوس -4.5 فولت.


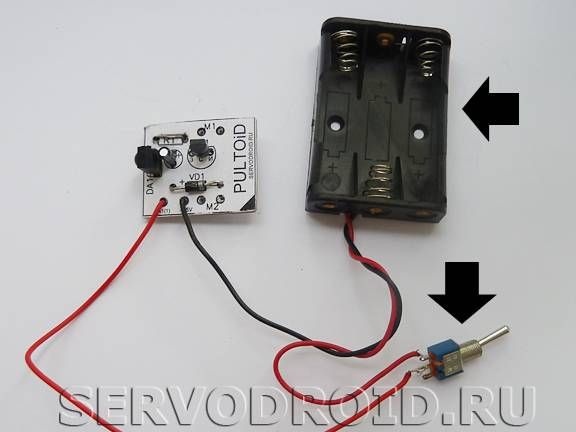
أيضًا في هذه المرحلة ، يمكنك توصيل المحركات ، وأسلاكها متصلة بجهات الاتصال M1 و M2.
الخطوة السابعة. المرحلة النهائية
في المرحلة النهائية ، يجب إصلاح جميع العناصر الإلكترونية. يتم إرفاقها بالقرص باستخدام شريط مزدوج الوجه. أما بالنسبة للمفتاح ، فيجب أيضًا إصلاحه ، لذلك يمكنك استخدام الغراء الساخن.

هذا كل شيء ، الآن الروبوت جاهز. يمكنك محاولة تشغيله وإصدار أمر لتشغيله باستخدام أي جهاز تحكم عن بعد.