

مثل الروبوت تم إنشاؤه بالفعل ويسمى DIY: LightBot. علاوة على ذلك ، يمكن لأي شخص جمعها ، ويمكن العثور على جميع عناصر الإنشاء بسهولة ، وسيتم تجميع الروبوت ببساطة شديدة. هذا النوع من الروبوتات سيطارد المالك باستمرار في الظلام ويسلط الضوء عليه في المكان المناسب ، مما يلغي الحاجة إلى حمل المصباح اليدوي. سيتم مراقبة الروبوت بواسطة المالك بفضل مستشعر الأشعة تحت الحمراء المتصل بقدم المالك.
المواد والأدوات لإنشاء الروبوت:
1. منارة الأشعة تحت الحمراء. سيتكون هذا الجهاز من أربعة مصابيح LED بالأشعة تحت الحمراء ، ويمكن العثور عليها في جهاز التحكم عن بعد من التلفزيون.
2. عجلتان من مجموعة K'nex أو ألعاب الأطفال.
3. محركان صغيران (يمكن العثور عليهما في ألعاب الأطفال).
4. ترانزستورات تحت الحمراء مثل NPN أو مقاوم ضوئي. ليس من الصعب شراء الترانزستورات الضوئية بالأشعة تحت الحمراء.
5. ثلاث بطاريات AA واحد 9 فولت.
6. أنبوب PVC.
7. المادة اللاصقة المذوبة بالحرارة.
8. شوكة بلاستيكية يمكن التخلص منها.
عملية التصنيع للروبوت:
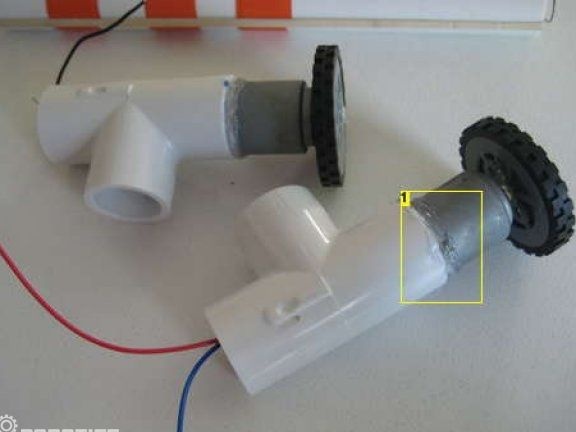
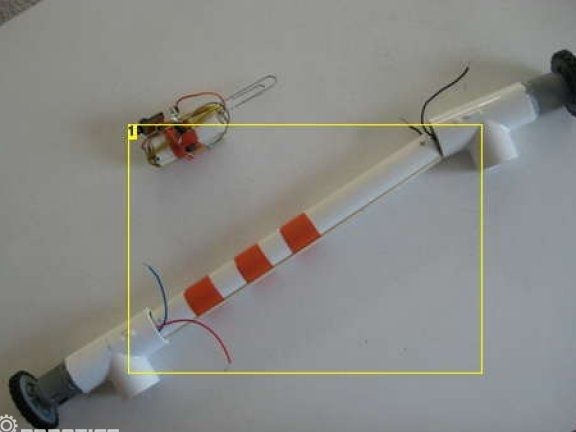
الخطوة الأولى. تركيب المحرك
تحتاج أولاً إلى تثبيت المحركات. لتركيبها ، يتم استخدام "المحملات" البلاستيكية ، ثم توضع على الأنبوب الرئيسي. يتم تثبيت المحركات بمادة لاصقة تذوب الساخنة. ليس من الضروري أن نأسف على الغراء هنا. أيضا في هذه المرحلة ، يمكن وضع العجلات على محور المحركات. بحيث يمكن تثبيتها بإحكام ، يمكن أيضًا تثبيتها بمادة لاصقة تذوب على الساخن.
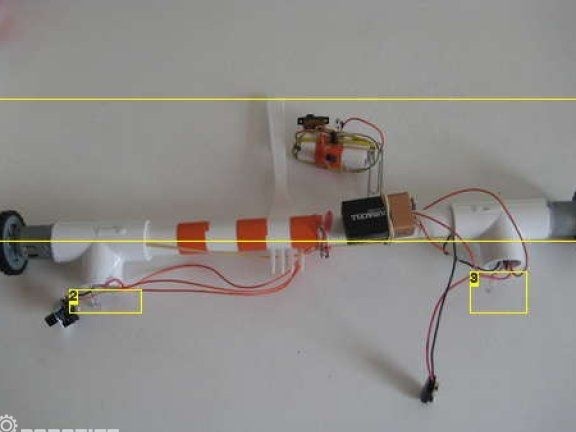
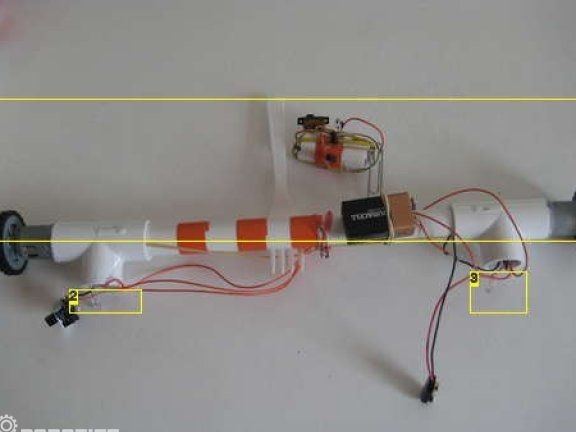
الخطوة الثانية تركيب مقاومات ضوئية
هناك حاجة إلى مقاومات ضوئية من أجل تتبع منارة الأشعة تحت الحمراء. سيكونون نوعًا من عيون الروبوت. اعتمادًا على الاتجاه الذي سيخرج منه الضوء ، سيسرع الروبوت أحد المحركات ليدير الاتجاه الصحيح.
يتم إرفاق مقاومات ضوئية بـ "المحملات" في الأماكن الموضحة بالأرقام 2 و 3. في هذه المواضع يمكن تثبيتها بمادة لاصقة ثلاثية العصا.
الخطوة الثالثة تركيب التيار الكهربائي
في المجموع ، يعمل الروبوت على مصدرين للطاقة. هذه ثلاث بطاريات AA وبطارية واحدة 9 فولت. أما بطاريات الإصبع فتركب داخل الأنبوب.حسنًا ، يتم توصيل بطارية من نوع "كرونا" بالهاتف من الخارج.
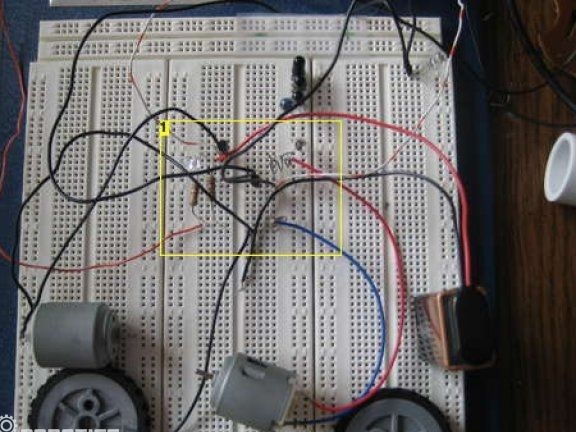
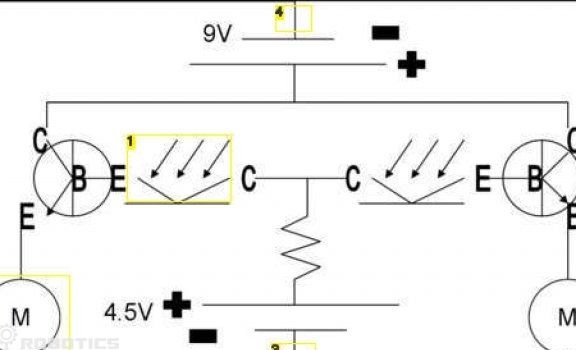
الخطوة الرابعة دارة روبوت
تم تصميم المخطط بطريقة بحيث إذا رأى الروبوت إشعاعًا على جانب واحد ، فإنه يسرع المحرك من الجانب المقابل ، بحيث يستدير الروبوت. يتم تحقيق سرعة المحرك المطلوبة عن طريق استبدال المقاومات تجريبيًا.
يمكن استكمال دائرة أخرى بمفتاح. يجب أن يتم تثبيته بطريقة تقطع إمدادات الطاقة للروبوت.
في الرسم التخطيطي ، يشير الرقم 1 إلى ترانزستور ضوئي ، 2 - وحدة تحكم المحرك ، 3 - مكان لتثبيت مفتاح ، 4 - يمكنك أيضًا وضع مفتاح هنا.
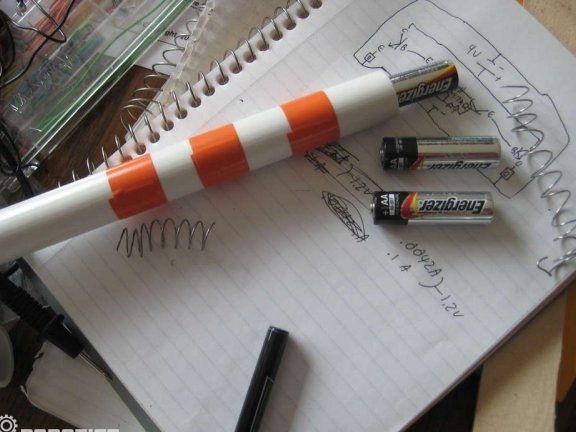
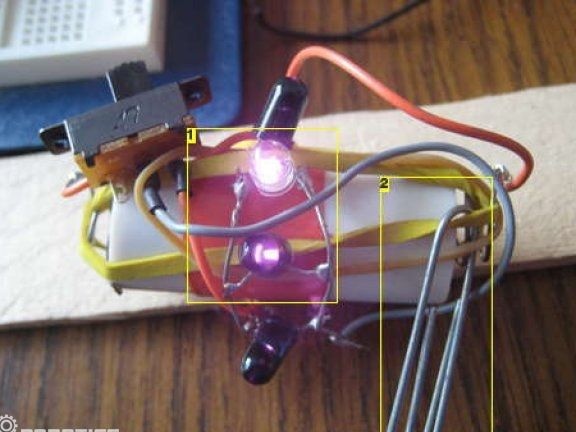
الخطوة الخامسة إنشاء منارة IR
لإنشاء منارة للأشعة تحت الحمراء ، يتم أخذ أنبوب قصير من كلوريد البولي فينيل ، حيث يتم تثبيت بطارية AA واحدة. يتم إجراء الاتصالات بفضل شريط مطاطي ، ويتم التحكم في مصدر الطاقة إلى الثنائيات تحت الحمراء الأربعة بواسطة مفتاح. من المستحيل رؤية هذا الضوء بالعين ، من أجل التحقق من قابلية تشغيل الثنائيات التي يحتاجون إليها من خلال كاميرا رقمية. يتم تثبيت المنارة بمشبك ورق عادي على الساق.
الخطوة السادسة المرحلة النهائية من تجميع الروبوت
الآن يجب توصيل كل شيء كما هو موضح في الرسم التخطيطي. يحتاج الجزء الميكانيكي أيضًا إلى التجميع ، ويجب إيلاء أكبر قدر من الاهتمام للمقاومات الضوئية ، ويجب أن يلتزموا بها ، وإلا فلن يتمكنوا من التقاط إشارة المنارة. الآن ، عند تشغيل الروبوت ، تحتاج إلى التجول حوله ورؤية ما سيفعله.
بالطبع ، قد لا يلاحق الروبوت المالك في المرة الأولى ، ولكن يجب ألا تيأس ، لأنه يمكن تعديل المخطط وتكوين الروبوت حسب الحاجة. وفقا للمؤلف ، يمكن تثبيت البرنامج في المستقبل على الروبوت ، والذي بفضله سيتعرف على الأشياء والأشخاص. يمكنك أيضًا تثبيت العديد من أجهزة الاستشعار المختلفة وجعل هذا الروبوت جهازًا عالي التقنية.