




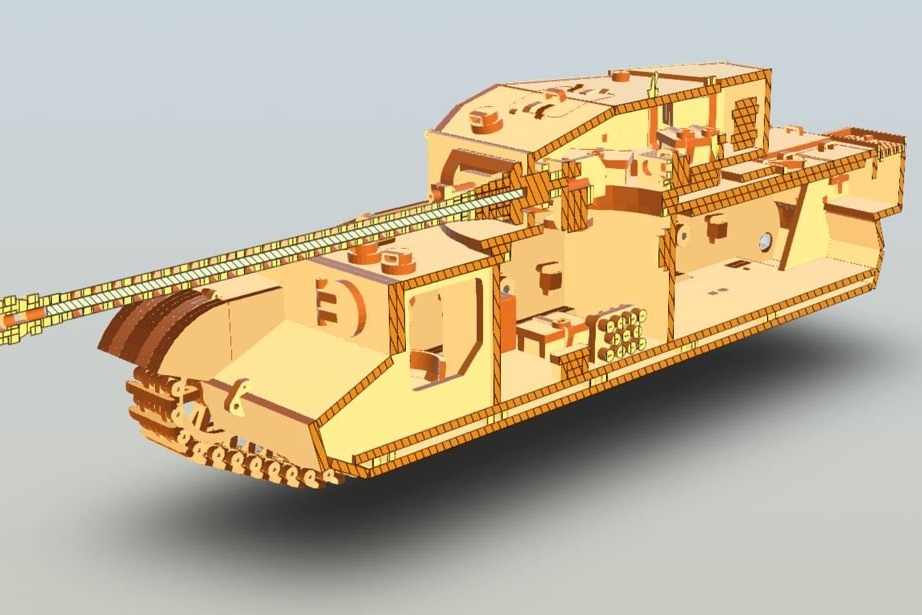
هذا الخزان ليس أول تجمع للسيد. السمة المميزة لهذا النموذج الخاص هي تعليق الربيع ، وتزويد النموذج بمحرك ، وقابلية الصيانة.
دعونا مشاهدة عرض توضيحي.
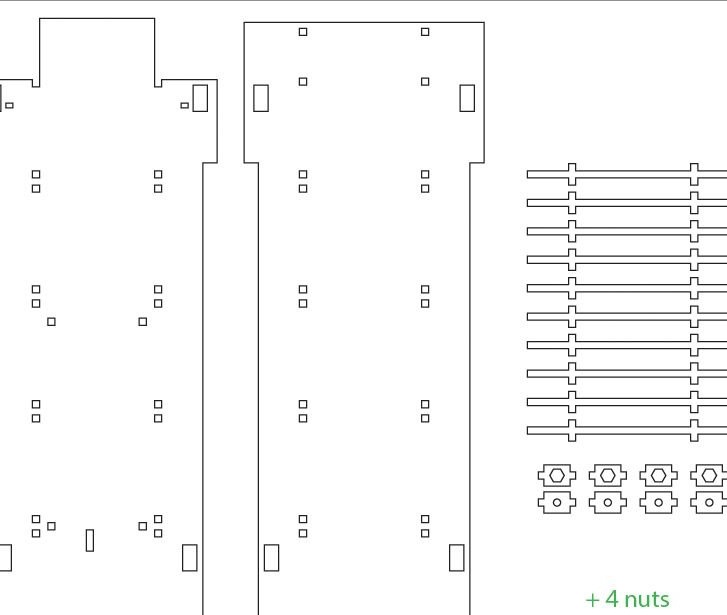
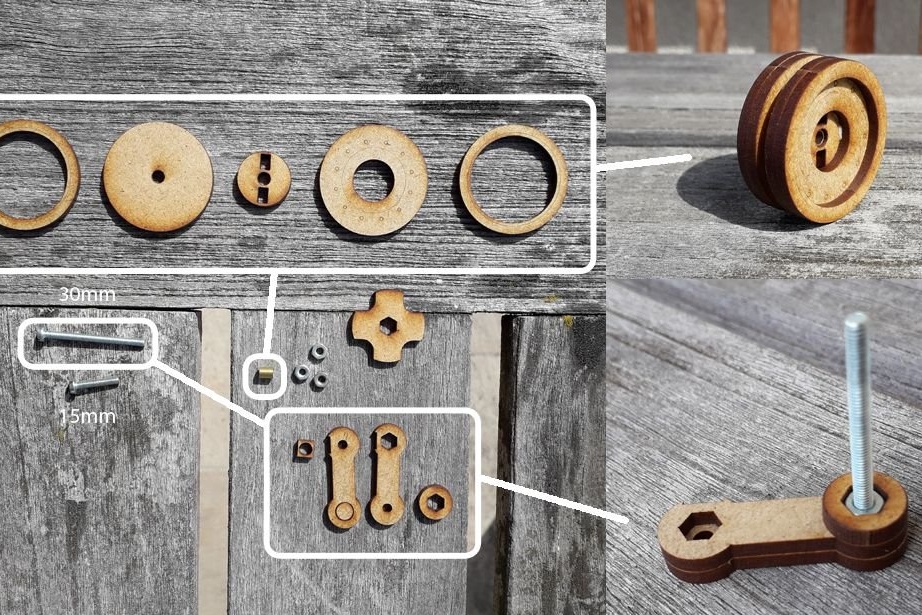
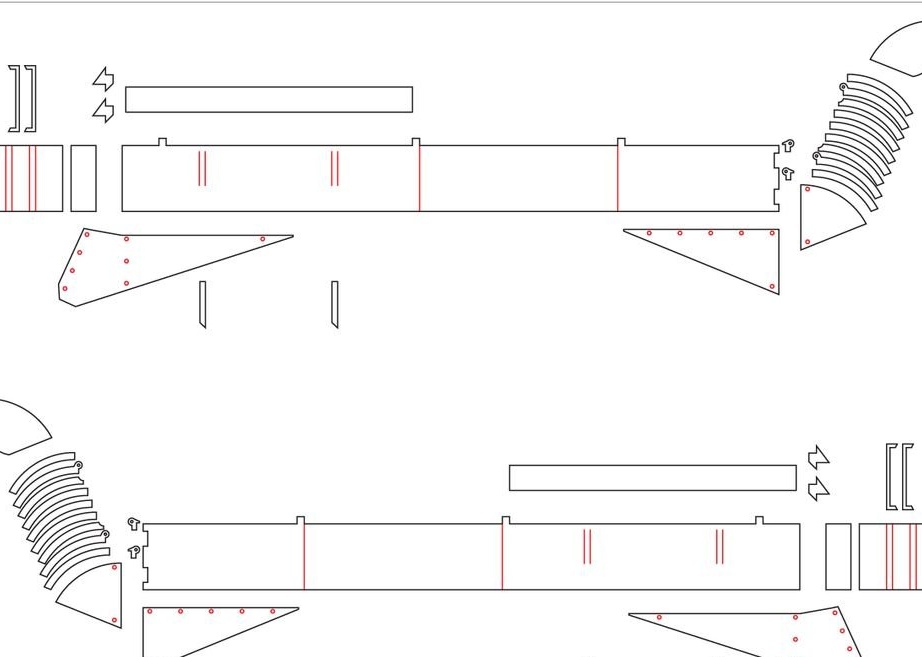
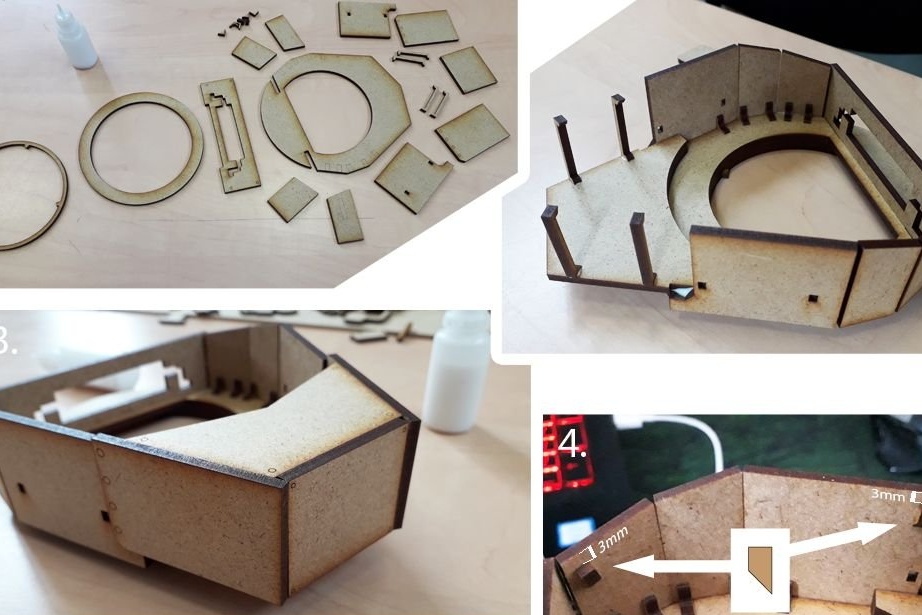
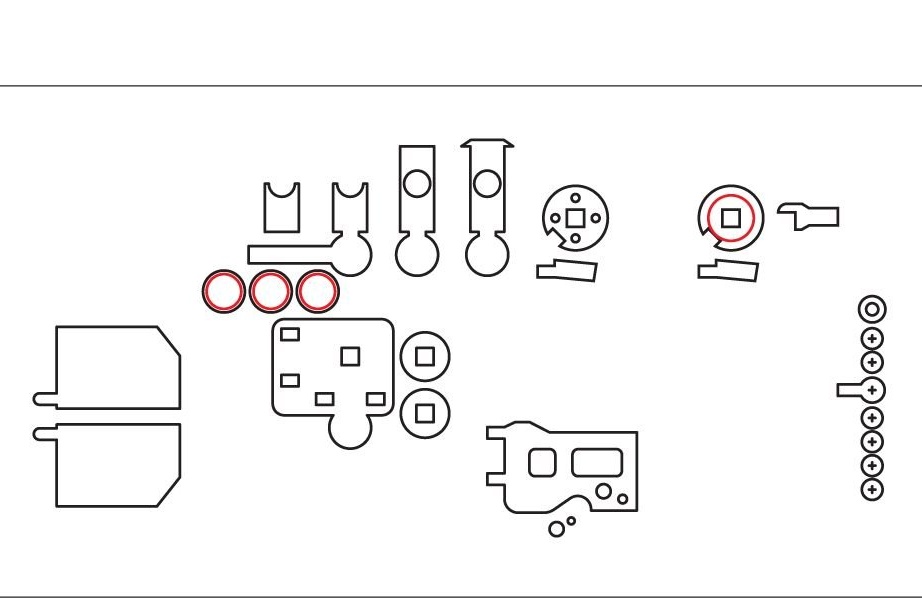
يتم قطع تفاصيل الحالة على قاطع الليزر ، وتتوفر الملفات على هذا الرابط.
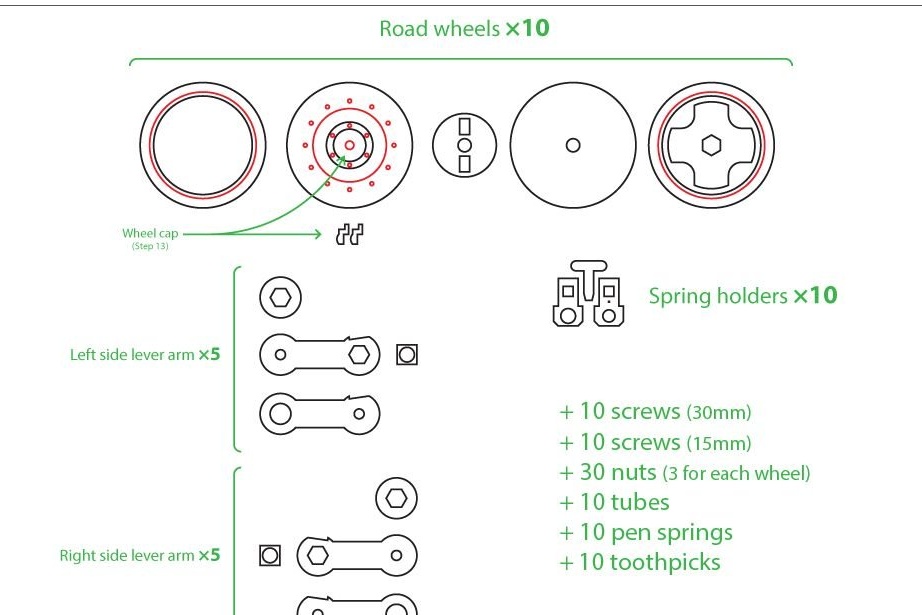
بالإضافة إلى أجزاء الجسم ، ستكون هناك حاجة إلى ما يلي
الأدوات والمواد:
- براغي بقطر 3 مم:
-14 قطعة بطول 15 ملم ،
-10 قطع بطول 25 ملم ،
-10 قطع بطول 30 ملم.
- أنابيب x20 Ø4 مم (قطر داخلي Ø3 مم) ؛
- أسلاك معدنية بقطر 1 مم ؛
- 3 مم قضبان ملولبة.
- نوابض للمعلقات بقطر 4.5 مم وطول 30 مم -10 قطع.
- مسامير M4 2 قطعة ؛
مسواك
-لوحة.
متحكم ESP8266 ؛
- توصيل الأسلاك ؛
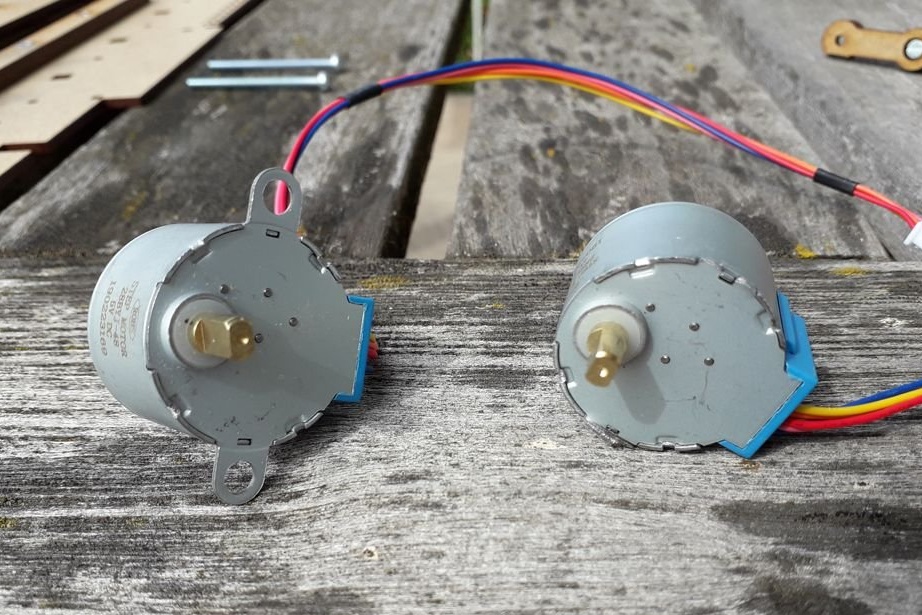
- محرك 28BYJ-48 مع لوحة تحكم - 2 قطعة ؛
-بطارية 5 فولت ؛
الخطوة الأولى: المراجعة
في هذه الخطوة ، يكشف السيد له النموذج دبابة ويشير أيضا الرابط إلى الموقع حيث يمكنك رؤية الخزان في شكل مفكك.
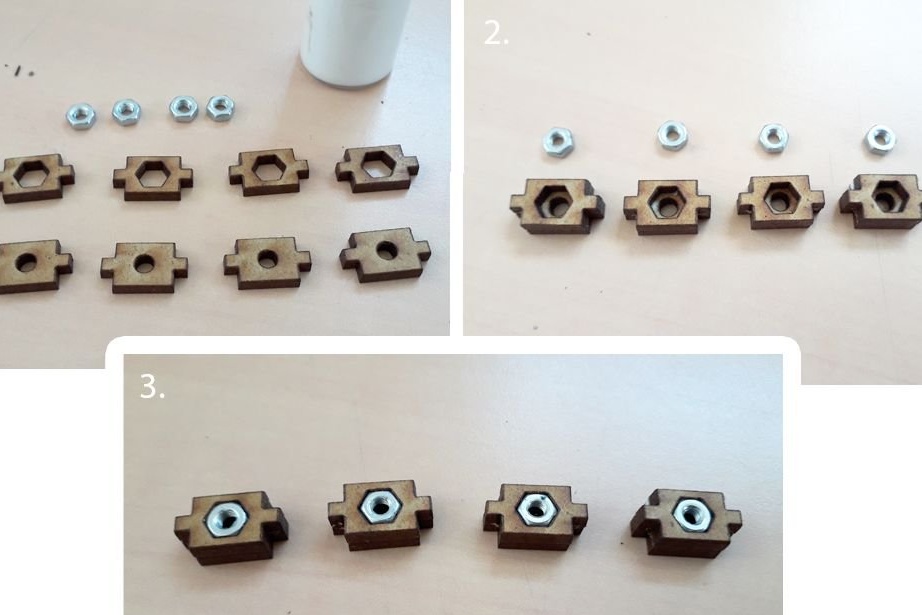
الخطوة الثانية: القاع
يبدأ السيد في التجميع من أسفل الخزان. تثبيت المكسرات في الجبال. يتصاعد على جانبي القاع. يؤسس الدعم. يضبط الطبقة الثانية.
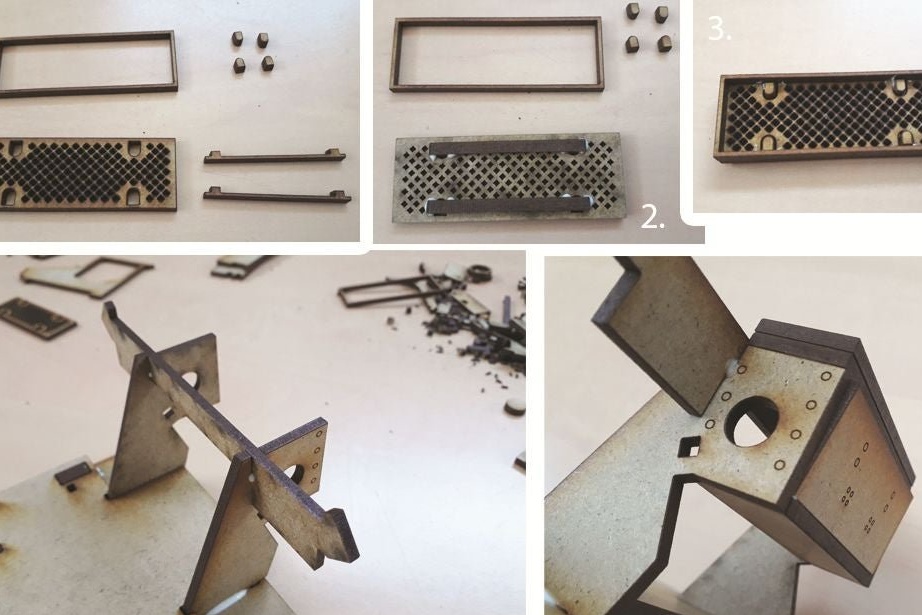
الخطوة الثالثة: الحالة
يبدأ تجميع الجسم. يجمع المبرد والظهر.
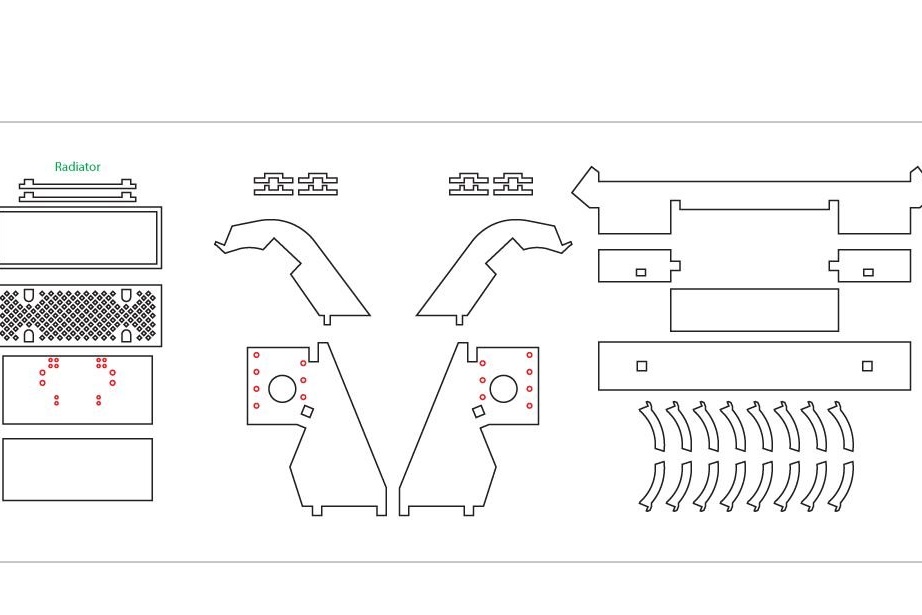
يجمع الجبهة.
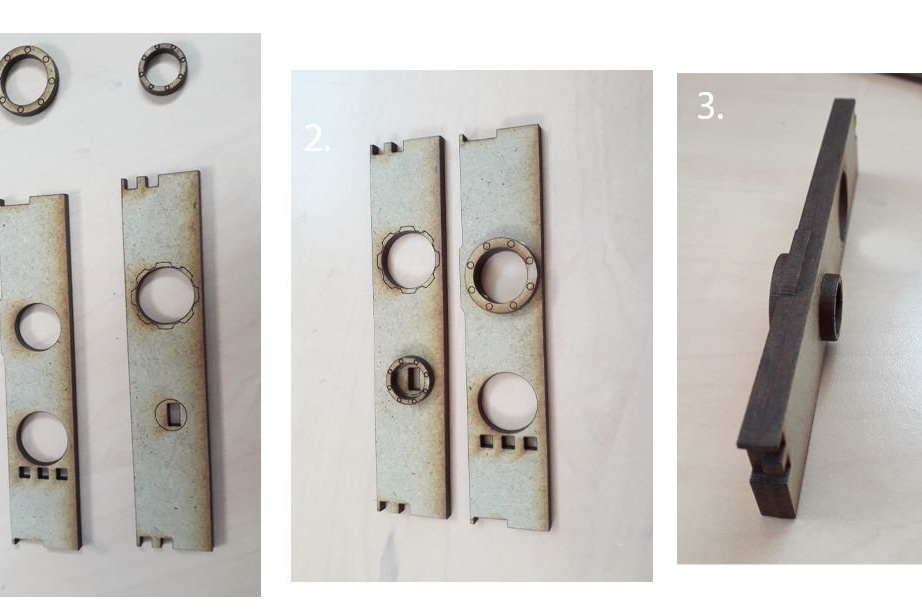
بعد وضع الدروع الأمامية ، يتم الانتهاء من البدن. سيتم ثني أجزاء أخرى أو لصقها عليه دون اللصق
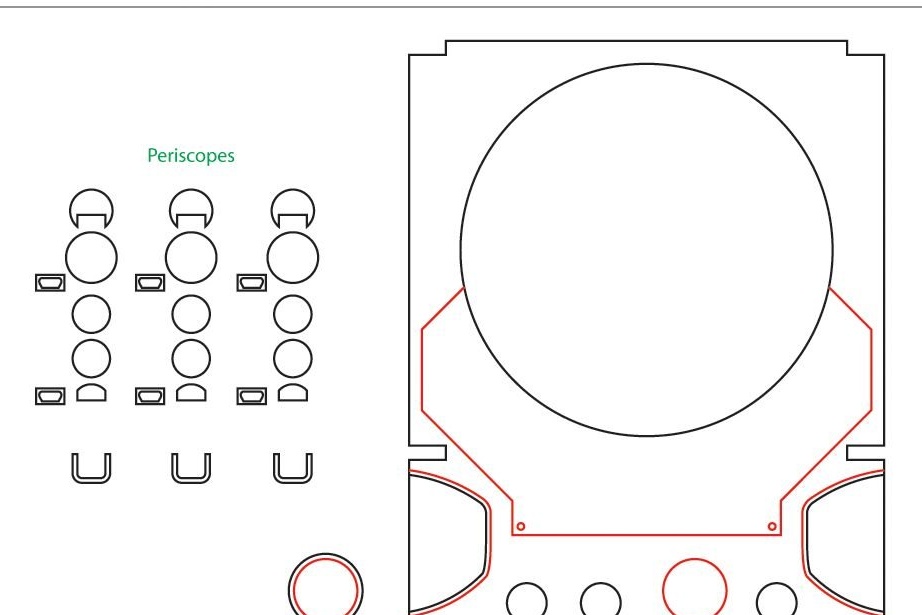
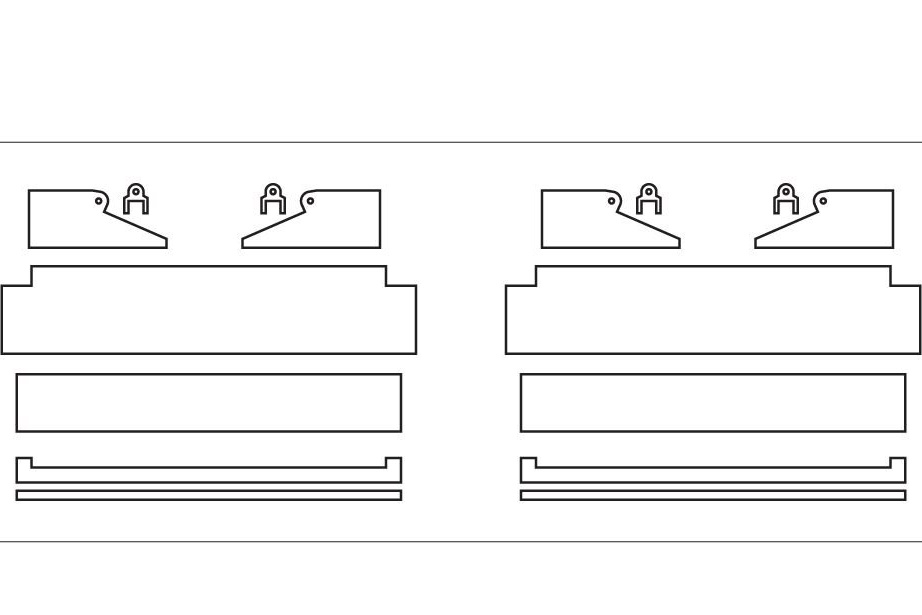
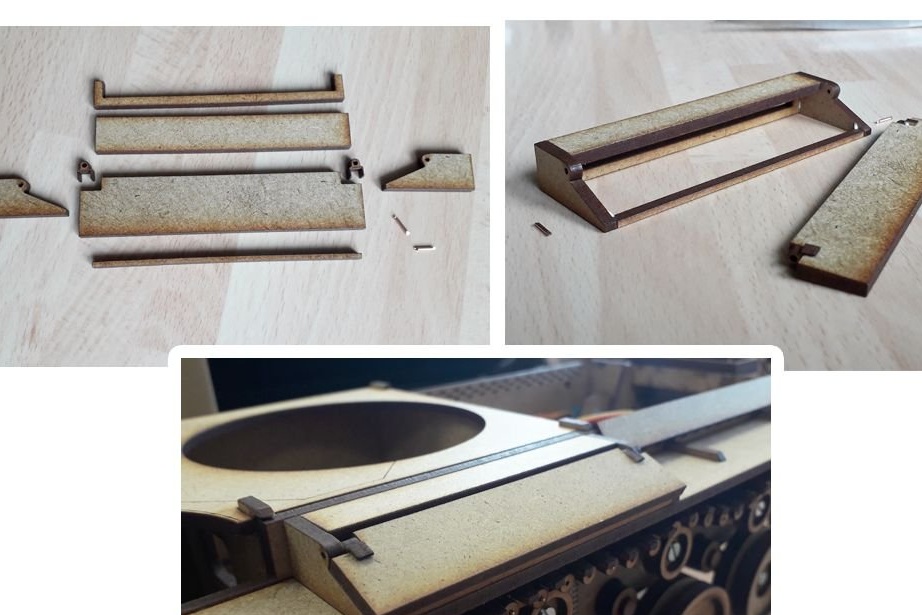
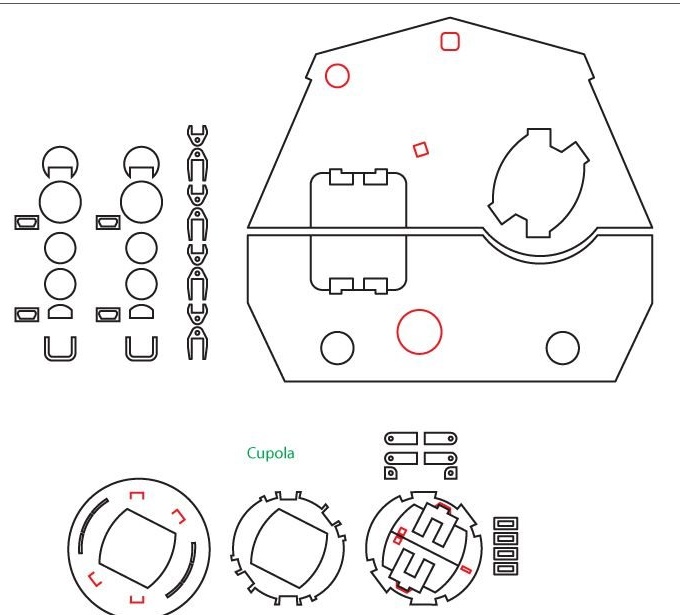
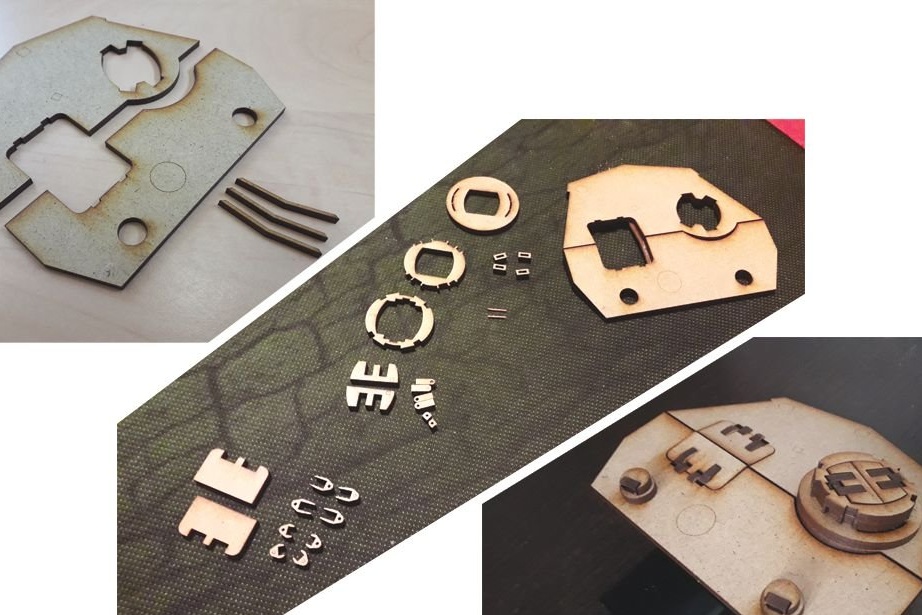
الخطوة الرابعة: السقف و Periscope
هذا الجزء هو جزء قابل للإزالة. يتم ذلك من أجل الوصول إلى الداخل. يتم تثبيت ذراع المنظار في نهاية السقف. يوضع المنظار على السطح ، لكنه لا يلتصق به.

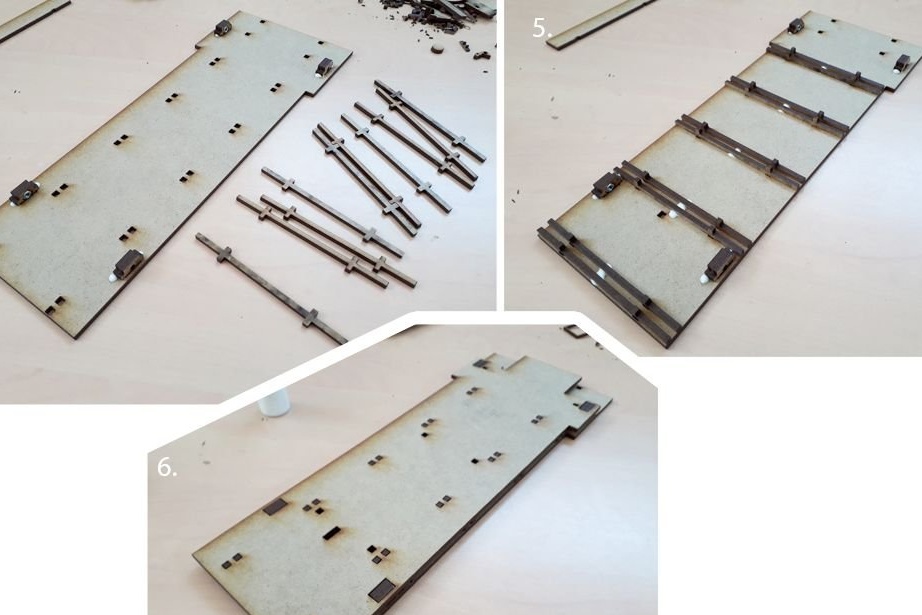
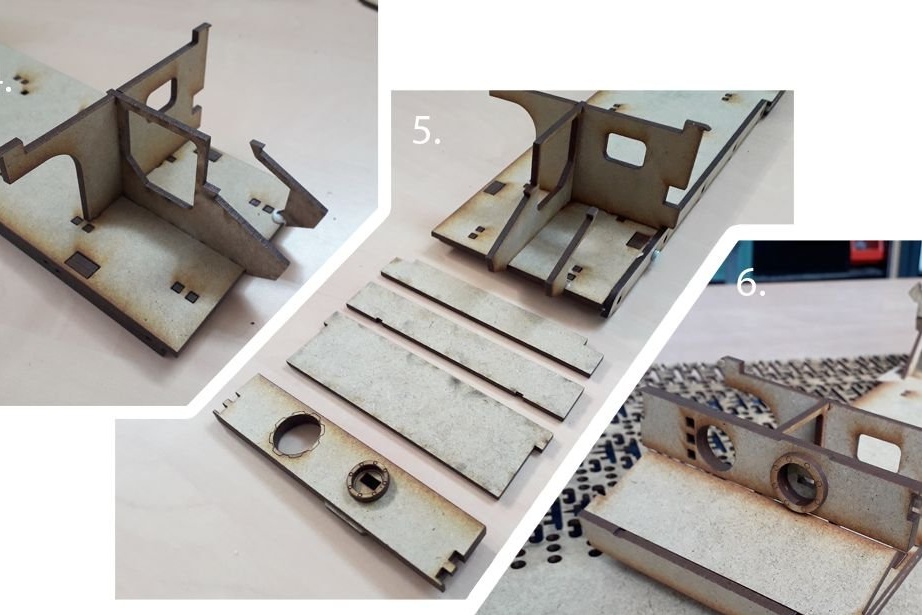
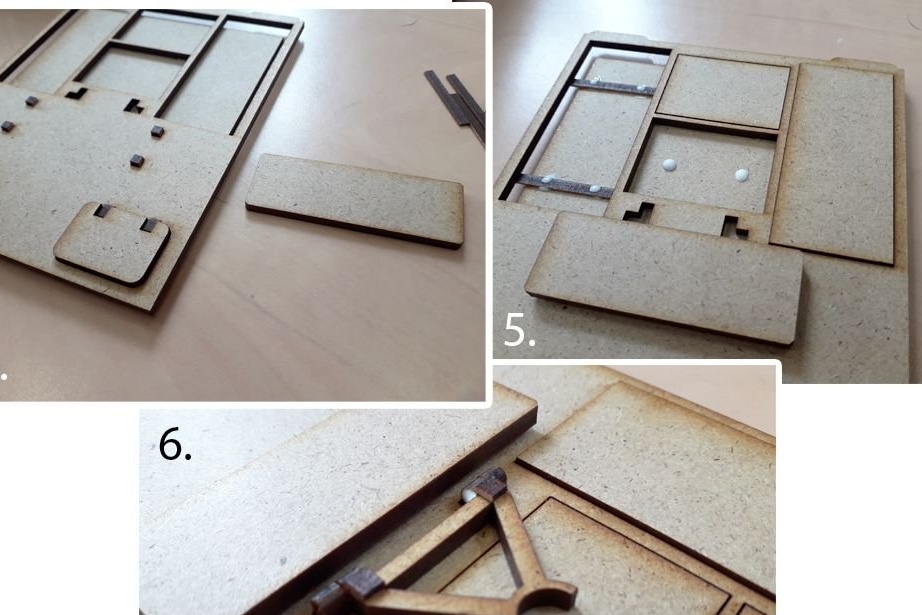
الخطوة الخامسة: الجانب
يتم تعليق أذرع التعليق على الجدار الجانبي. يتم تثبيته في القاع المزدوج ببراغي 15 مم باستخدام 4 صواميل تم تثبيتها في الخطوة الأولى.



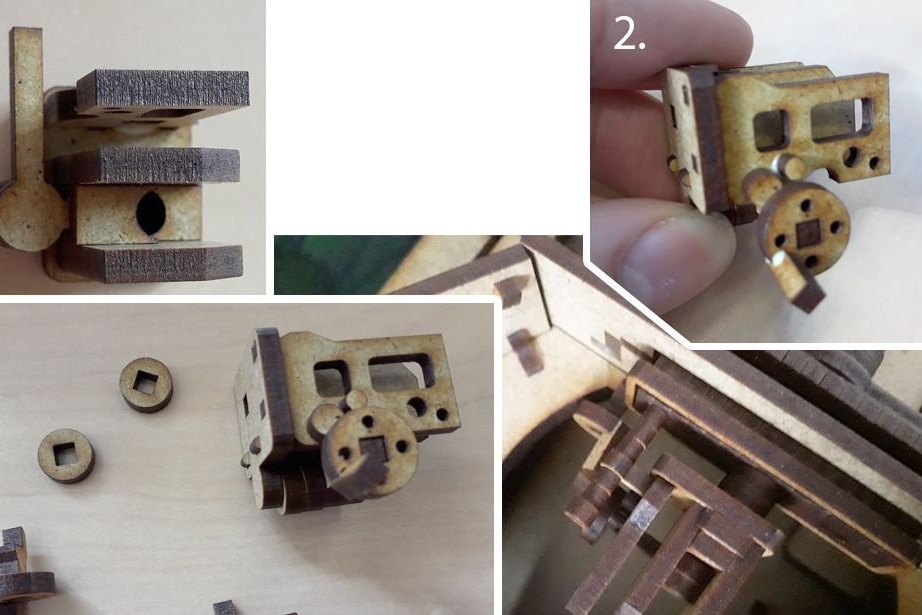
الخطوة السادسة: التعليق
تجميع وتركيب مكونات التعليق. تنعكس جميع الخطوات بالتفصيل في الصور. ضع القليل من الغراء على نوابض التثبيت. داخل الينابيع يضع قطعة من أعواد الأسنان. سيمنع هذا ظهور الينابيع.

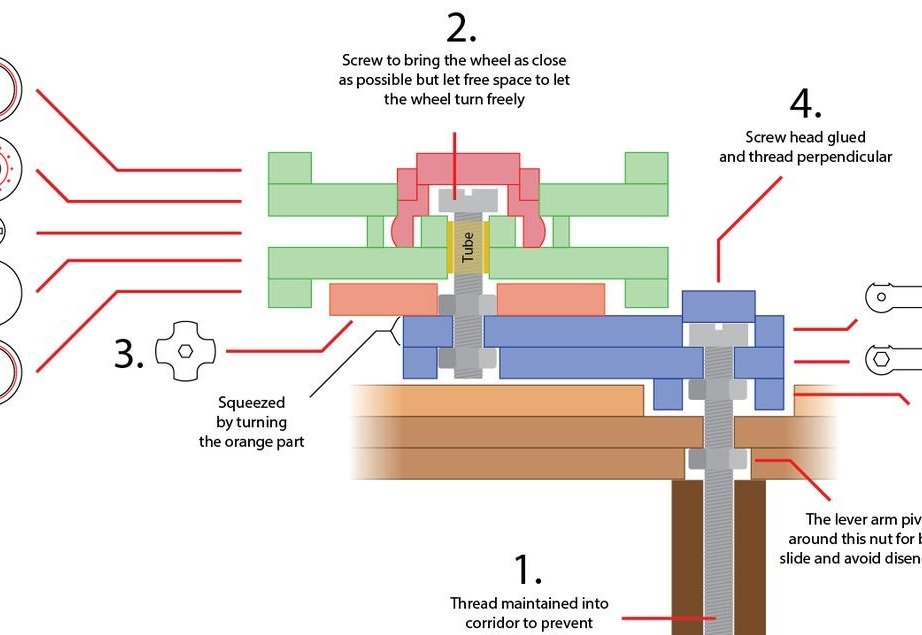
تجميع وتثبيت العجلة السفلية الأمامية. يتم تركيب أنبوب نحاسي ومسمار 20 مم داخل صرة العجلة. ثم يتم إغلاق لوحة الوصل بقابس.
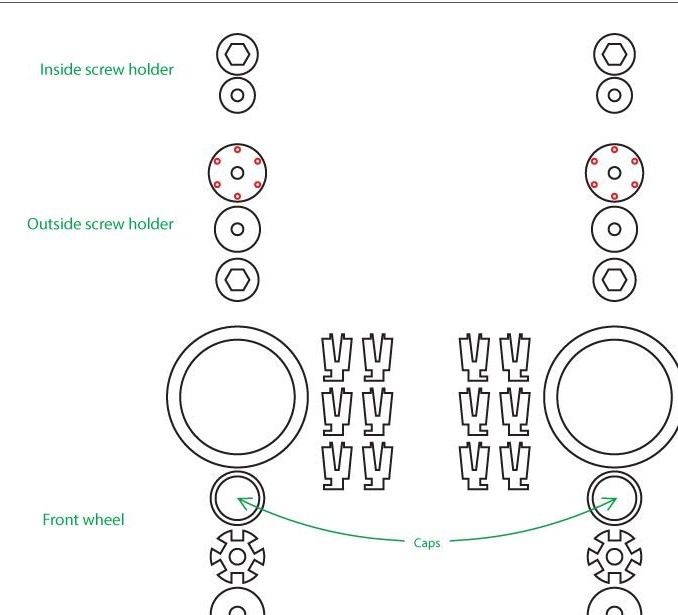

تجميع وتركيب عجلة بدلاً من ذلك.


تجميع وتثبيت عجلات القيادة. سيتم توصيل هذه العجلات بالمحركات المثبتة في خزان الخزان.
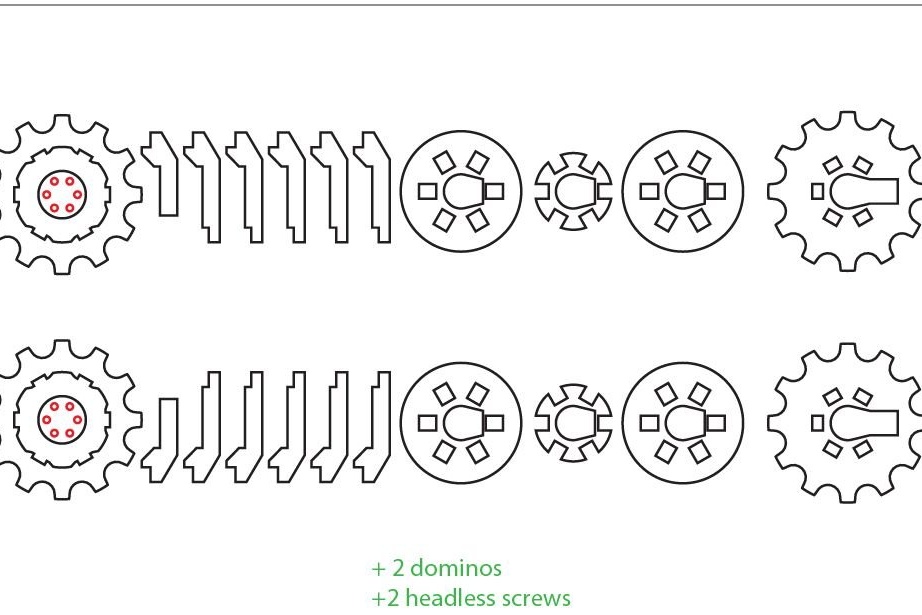
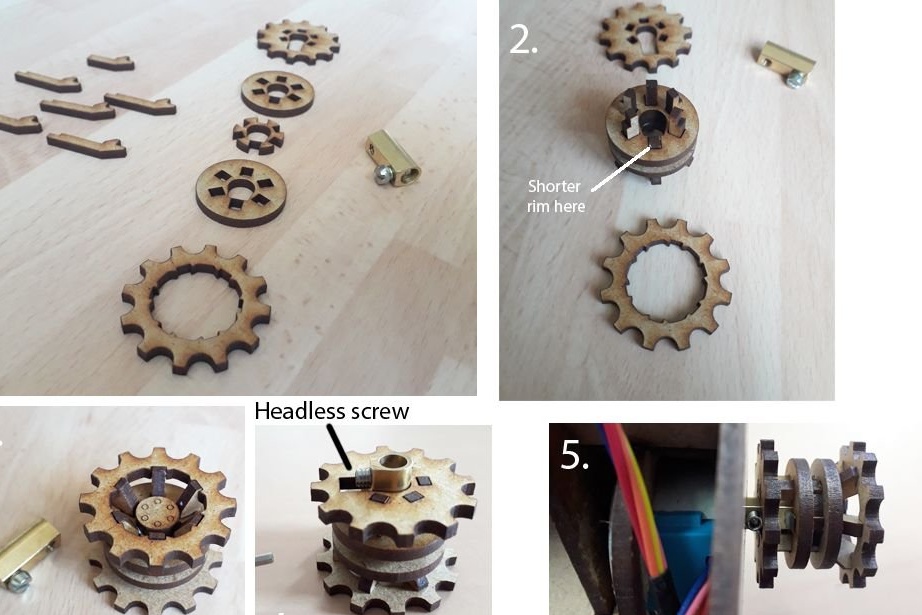
تثبيت المقابس على العجلات.

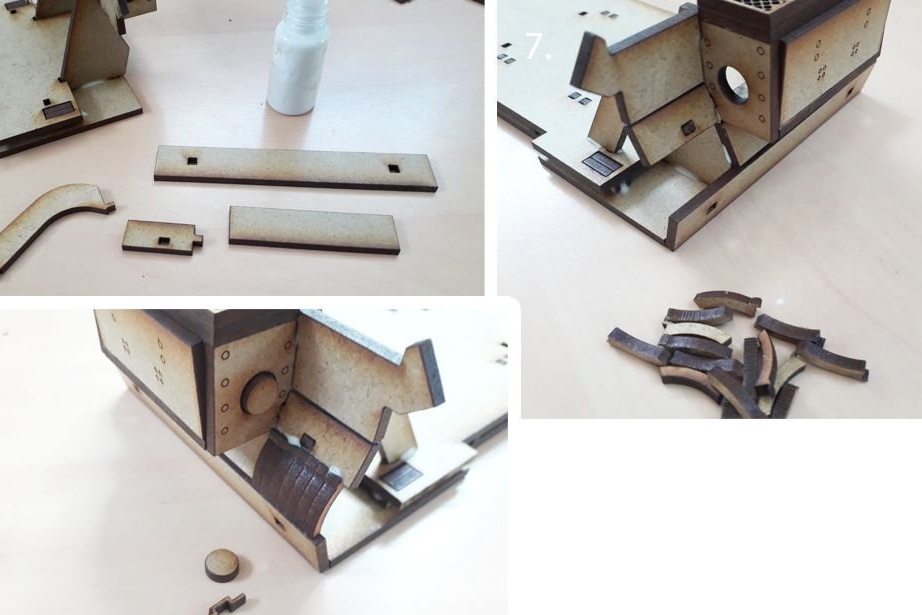
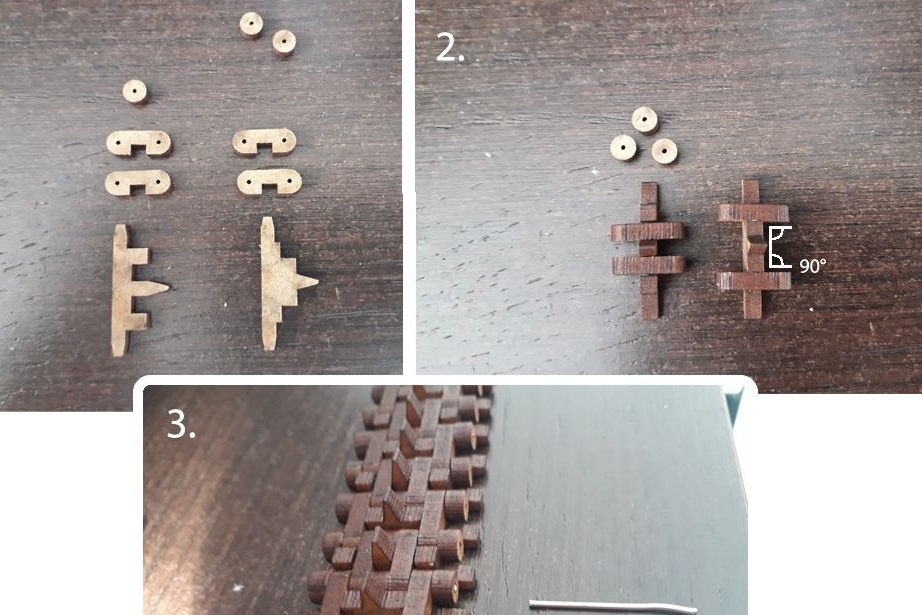
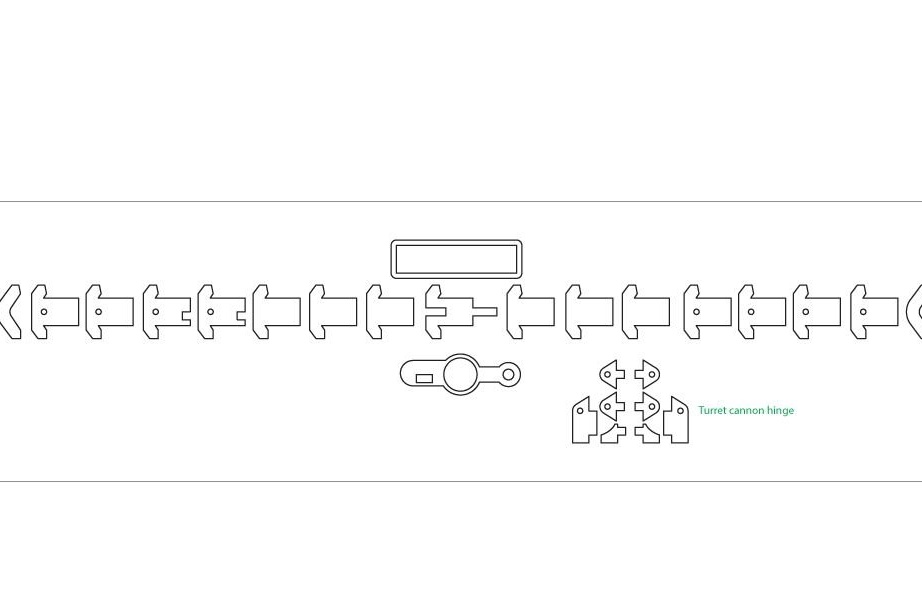
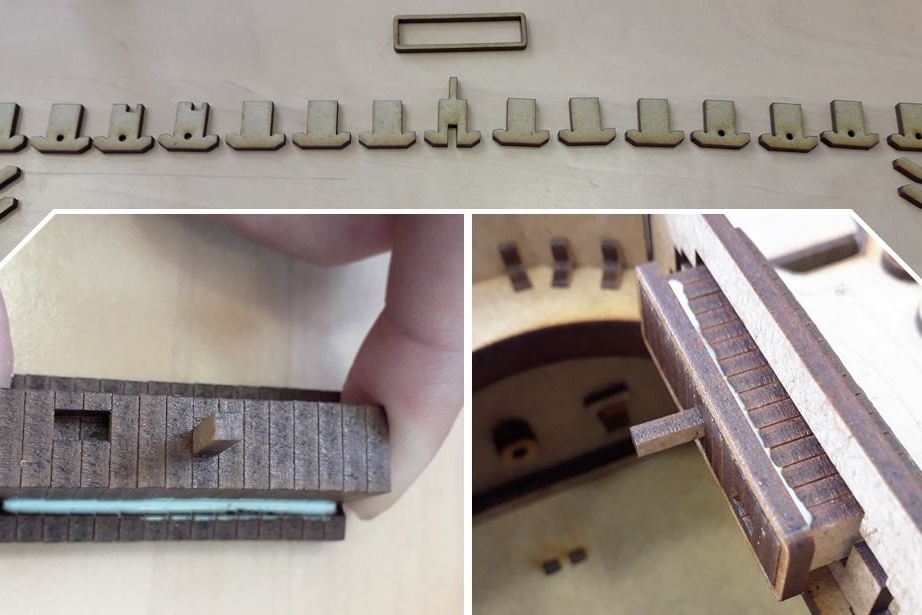
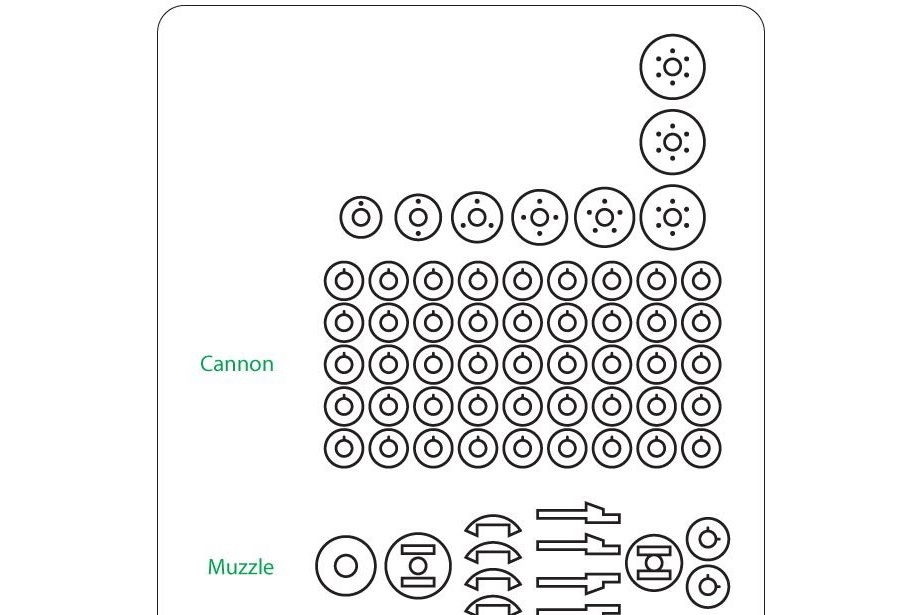
الخطوة السابعة: المسار
يجمع مسارات كاتربيلر. يتم تثبيت المسارات معًا بسلك رفيع. على جانبي السلك يتم إصلاحه بأغطية.
الخطوة الثامنة: حماية الأوساخ والدرج
تثبيت الدروع. الجزء الأمامي من اللوحات قابل للتحريك ويمكن رفعه.


يضبط الدرج. كحلقات ، يتم تثبيت قطع من الأسلاك.
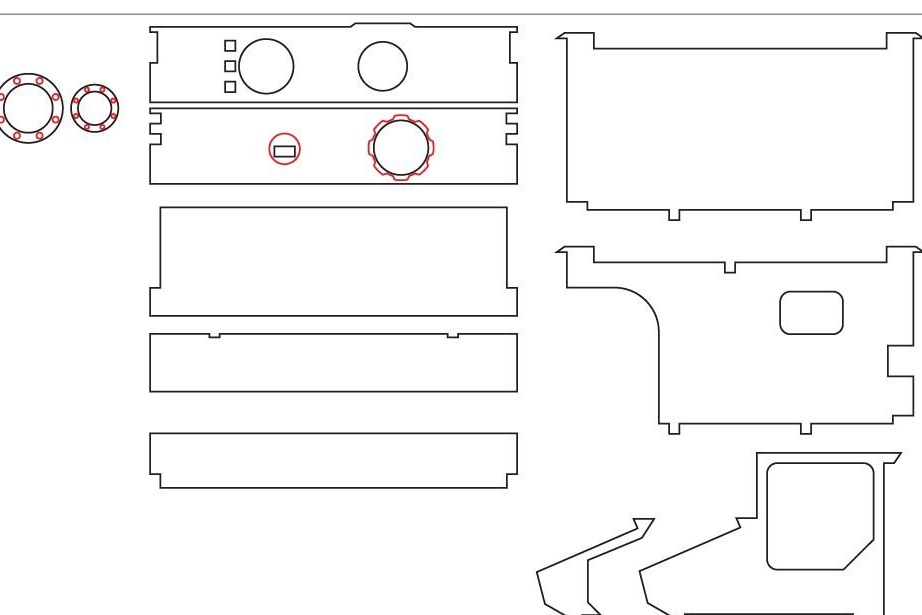
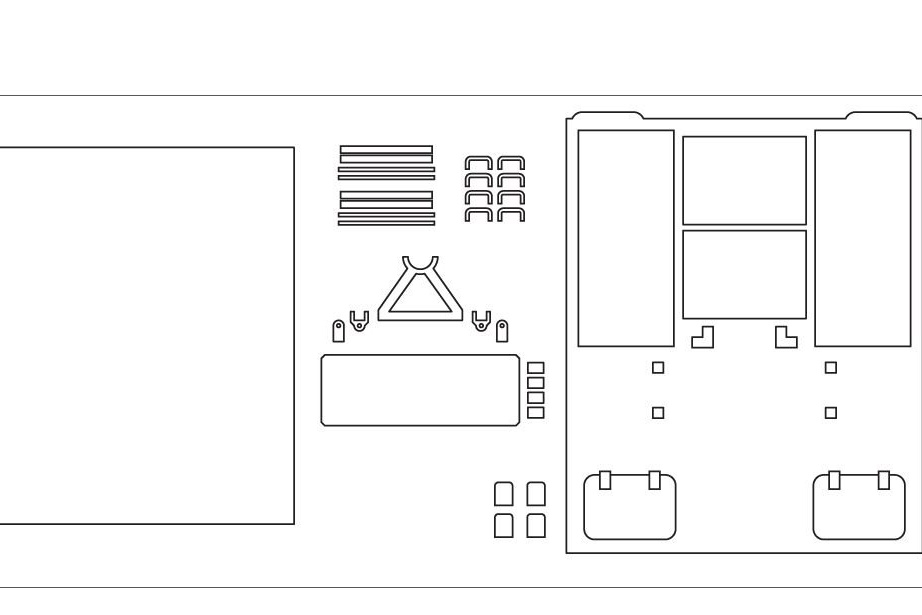
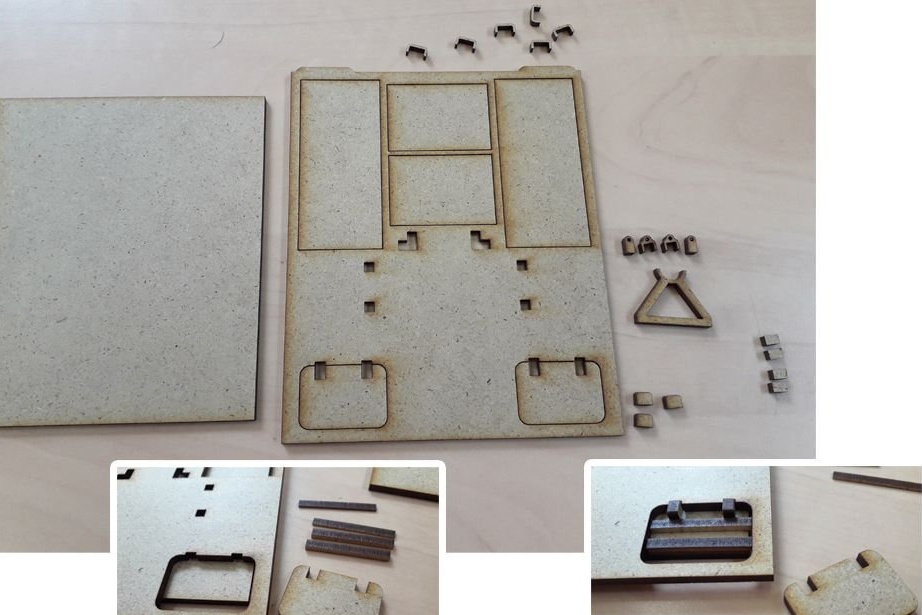
الخطوة التاسعة: الخلف
يقع هذا الجزء خلف البرج وسيغطي كامل المبنى الإلكترونيات.
الخطوة العاشرة: البرج
يجمع الجزء العلوي من البرج والجدران الجانبية.
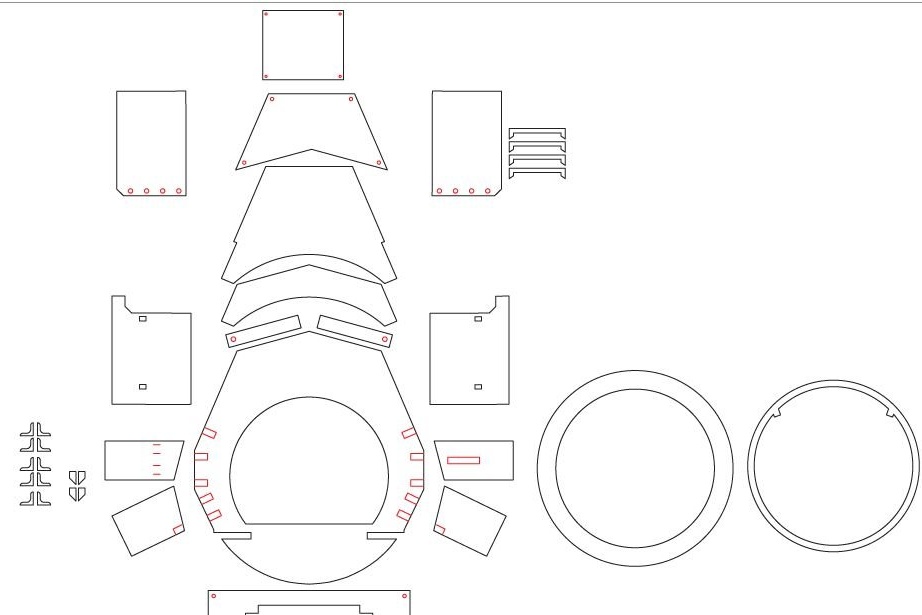
الغراء جبل البندقية.
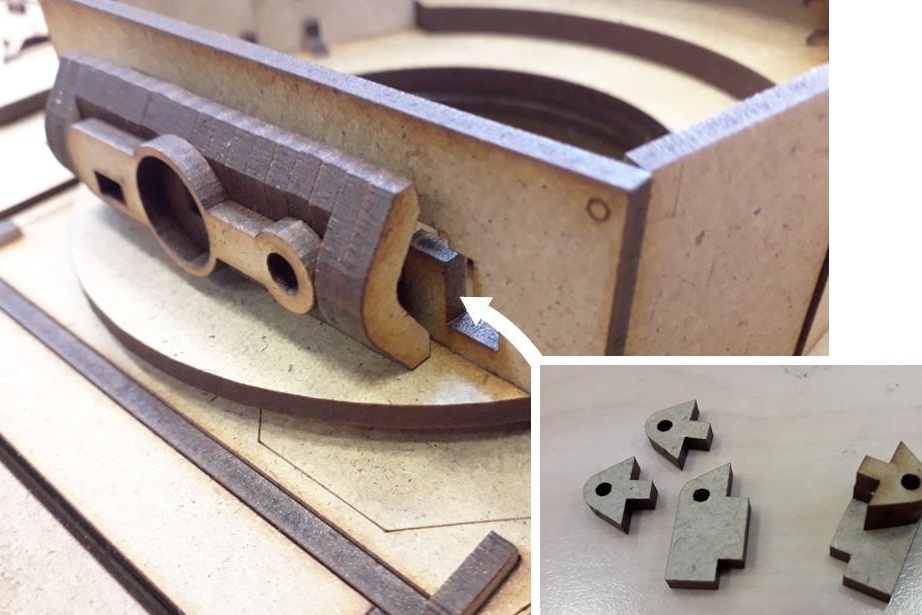
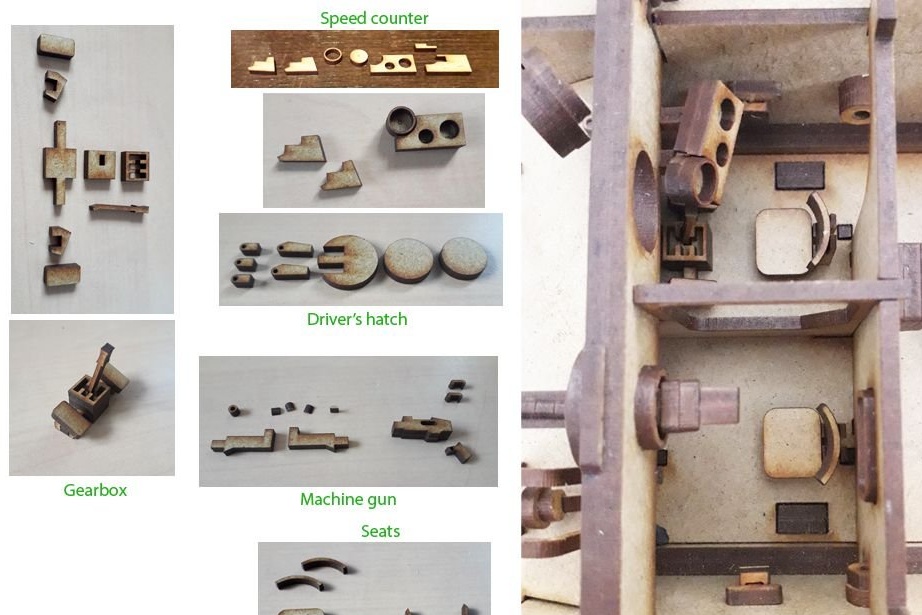
يضبط آلية التحكم في التركيب الداخلي والبندقية.

الخطوة الحادية عشر: بندقية
يجمع المسدس ، المسدس الرئيسي عبارة عن قضيب معدني. التفاصيل المتبقية معلقة عليه.

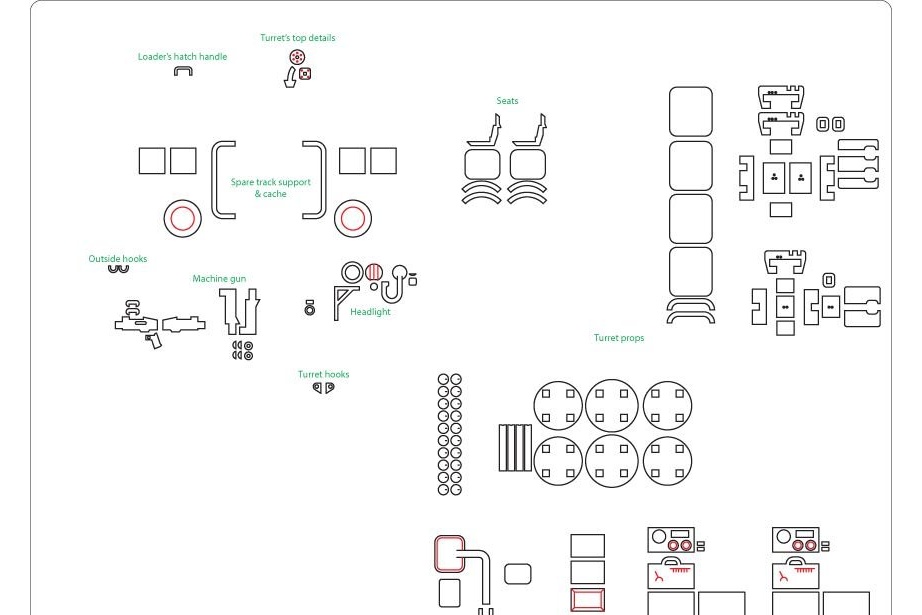
الخطوة الثانية عشرة: التفاصيل الصغيرة
يؤمن أجزاء صغيرة من الخزان.
في الداخل ، على الجانب الأيسر هناك مقعد ومدفع رشاش ، خارج برميل مدفع رشاش.
على مقعد السائق مباشرة: المقعد ، أذرع التحكم والدواسات ، فتحة سقف.
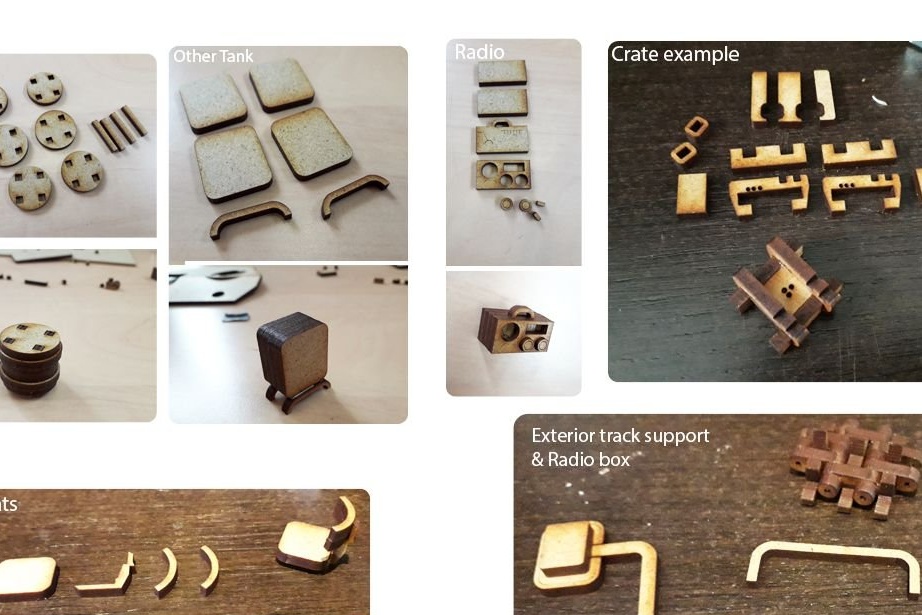
في الخارج: خطافات ، مصابيح أمامية ، صناديق ، ذخيرة ، حبل سلكي ، إلخ.
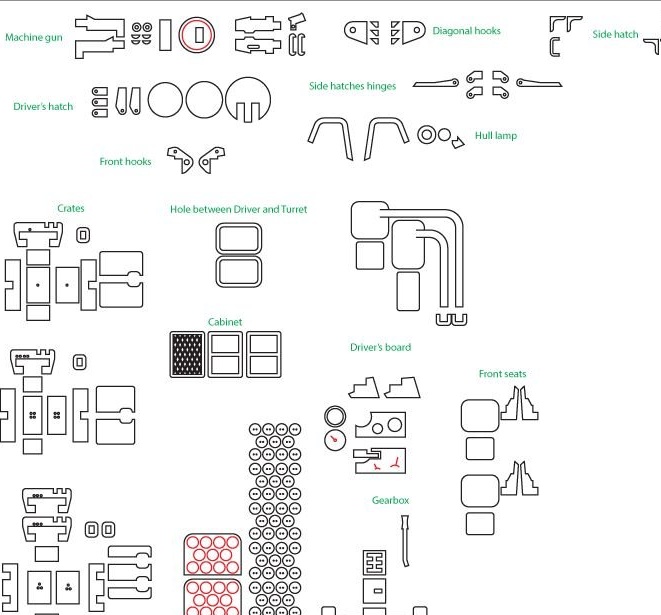

يتم تثبيت خزان تحت الماء على البرج ، جهاز اتصال لاسلكي داخل البرج.

الخطوة الثالثة عشر: الإلكترونيات
تثبيت المحركات. يقوم بتثبيت الجزء الإلكتروني وفقًا للرسم التخطيطي.
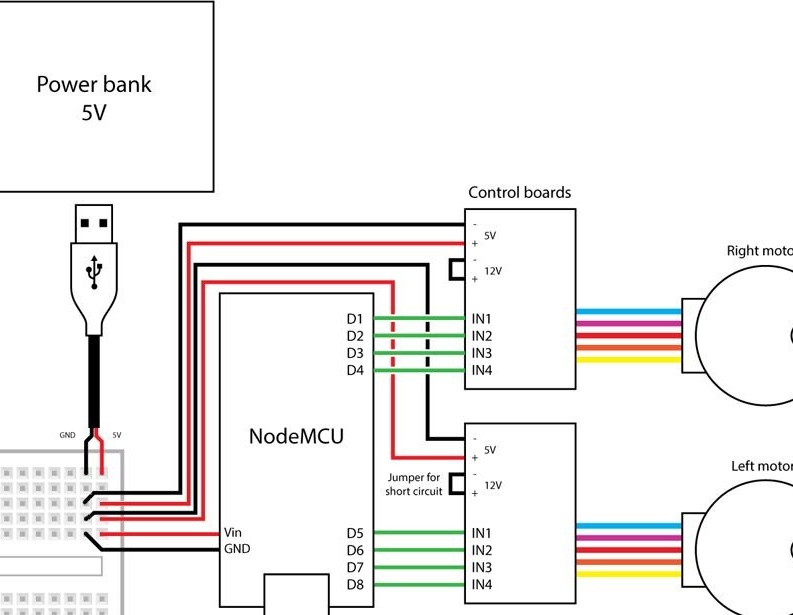

للتحكم اللاسلكي ، اخترت وحدة تحكم NodeMCU. يتم التحكم في النموذج من خلال NodeMCU وتطبيق Blynk (متوفر على Android / iOS). يوفر هذا التطبيق شاشة HUD قابلة للتخصيص بالكامل للتحكم في أي منها اردوينو أو هاتف iOS عبر WiFi.
لذا ، بعد تثبيت التطبيق ، أول شيء تفعله هو إنشاء حساب.
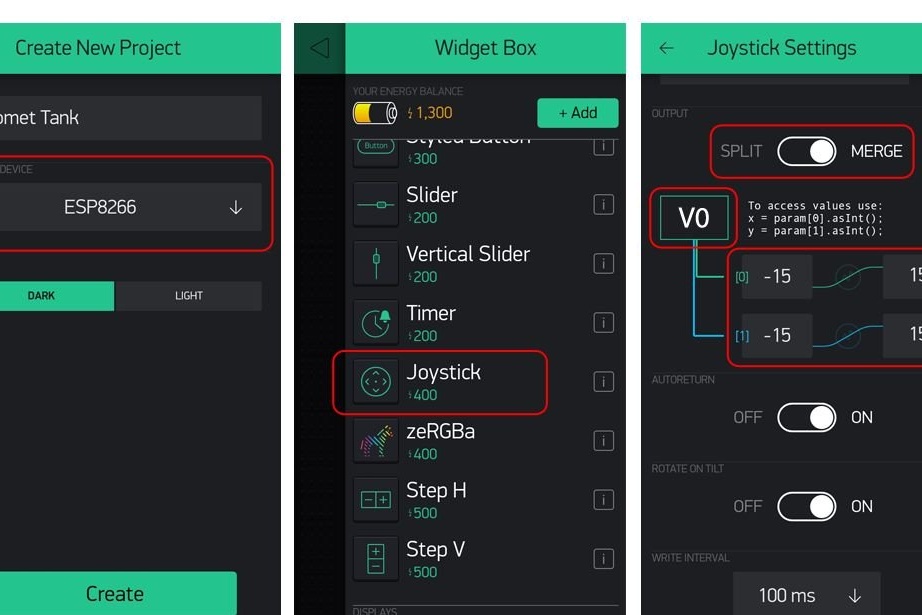
أنشئ مشروعًا جديدًا وعيِّن ESP8266 (شريحة NodeMCU) كمتحكم دقيق واضبط وضع WiFi.
بمجرد رؤية HUD الخاص بك لأول مرة ، قم بإنشاء عصا التحكم. إرسال معلومات عصا التحكم إلى الطرف الافتراضي V0 للعقدة.
بمجرد إنشاء عصا التحكم ، انقر عليها لفتح إعداداتها. في الموضعين X و Y ، اضبط النطاق من -15 إلى 15.
قم بتثبيت المكتبات.
أولاً ، قم بتنزيل مكتبة Stepper2 هنا: https://github.com/udivankin/Stepper2
هذه المكتبة هي خيار جيد لمحركات السائر الرخيصة ، مثل تلك التي استخدمها السيد. يدير مراحل المحرك بشكل أفضل ويوفر عزم دوران أفضل. بعد تنزيل ملف .zip ، قم بتثبيته من برنامج Arduino: Sketch> Include Library> Add .ZIP Library ... وحدده.
ثم ، إذا لم يسبق لك إطلاق NodeMCU من قبل ، فأنت بحاجة إلى جهاز كمبيوتر للتعرف عليه. يحتوي Arduino IDE على مدير لوحة يتم تثبيت برامج التشغيل الصحيحة عليه.
انسخ السطر التالي:
https://arduino.esp8266.com/stable/package_esp8266com_index.jsonافتح الإعدادات والصقها في عناوين URL. احفظ الإعدادات وانتقل إلى مدير وحدة التحكم في Tools> Board> Boards Manager. يجب أن تكون بطاقة ESP8266 موجودة في نهاية القائمة. اختار المعالج الإصدار 2.5.0 مع IDE في 1.8.9.
تحتاج أيضًا إلى مكتبة Blynk ، والتي يمكن العثور عليها في Sketch> تضمين المكتبة> إدارة المكتبات ... ثم ابحث عن Blynk في حقل البحث.
انتقل إلى إعدادات المشروع وأرسل رمزًا مميزًا إلى عنوانك ، وهو عبارة عن سلسلة كبيرة تسمح لهاتفك بالتعرف على NodeMCU عند تشغيله. انسخ الرمز المميز من بريدك الذي تلقيته مؤخرًا والصقه في مصفوفة المصادقة.
الآن يمكنك تثبيت البرامج الثابتة.
Comet.ino
كل شيء جاهز ، الآن يمكنك الاستمتاع بعملك.