


أخذت جزءًا من تصميمي من تعليمات التجميع لـ Lego Technic 42049. والباقي هو ارتجالي. للإدارة ، سأستخدم وحدة Bluetooth متصلة بجهاز Android أو جهاز كمبيوتر.
لذلك نحن بحاجة إلى:
- ليغو تكنيك 42029
- ليغو تكنيك 42033
- Arduino Pro Mini 5v AT Mega 328
- عدد 2 محرك محرك L9110S
- محرك سيرفو SG-90
- وحدة بلوتوث HC-05 أو ما يعادلها
- USB-UART لبرامج اردوينو الثابتة
- محرك تروس صغير 50 دورة في الدقيقة
- علبة تروس مصغرة للسيارات 100 دورة في الدقيقة
- علبة تروس المحرك 6 فولت 150 دورة في الدقيقة
- عدد 2 ليد
- مقاومتان 150 أوم
- مكثف 10 فولت 1000 فائق التوهج
- 2 صف واحد يمشط PLS-40
- مغو 68mkGn
- 6 بطاريات NI-Mn 1.2v 1000mA
- موصل أبي ماما دبوسين إلى سلك
- Homutik
- أسلاك بألوان مختلفة
- جندى
- الصنوبري
- لحام الحديد
- مسامير 3x20 وصواميل وغسالات لهم
- مسامير 3x40
- مسامير 3x60
الخطوة 1 مجموعة المحور الخلفي
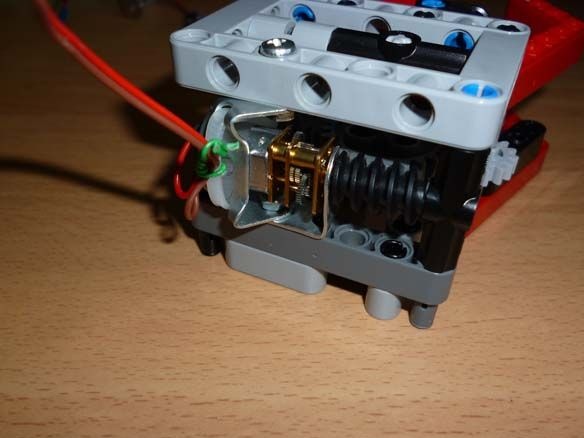
للحركة سنستخدم محرك تروس بمحرك 6 فولت بسرعة 150 دورة في الدقيقة. يجب قطع محور علبة التروس من كلا الجانبين ووضعه على أجزاء ليغو. يتم تجميع المحور الخلفي على النحو التالي:
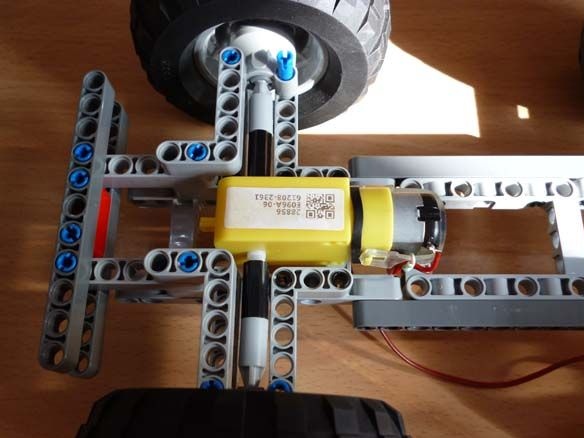
وعلى الجانب الآخر:
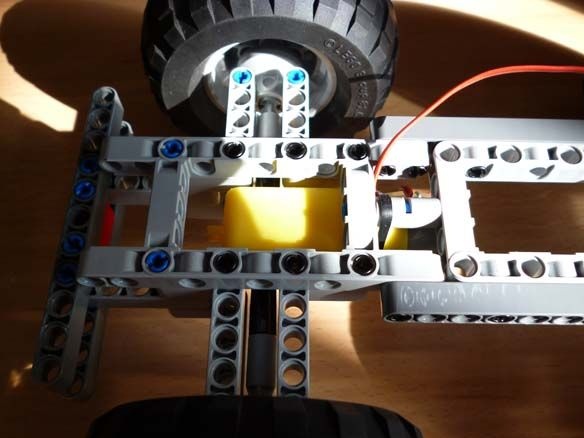
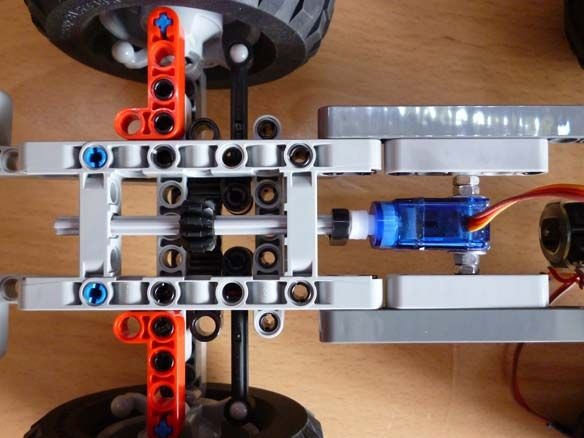
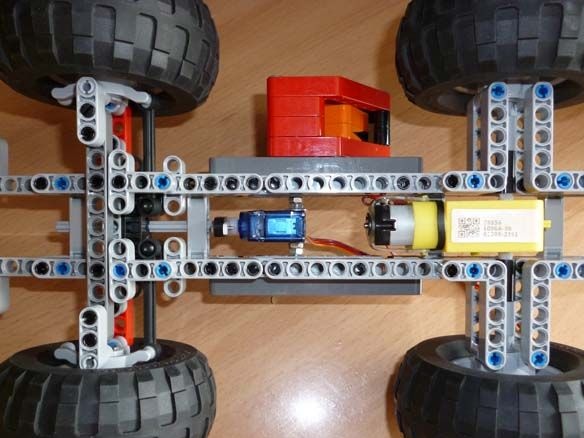
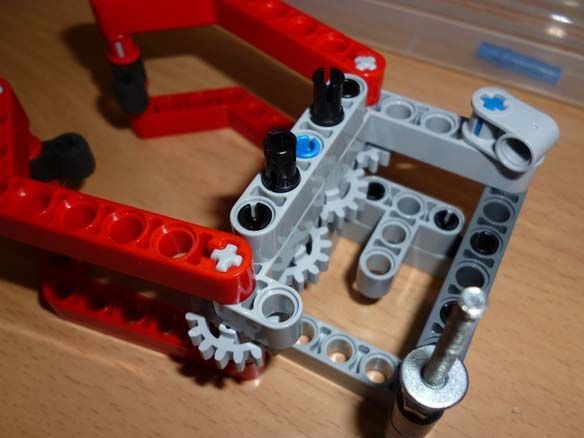
الخطوة 2 تجميع المحور الأمامي
لتدوير العجلات ، فإن أجهزة SG-90 مناسبة تمامًا. لإصلاحه على نموذجنا ، من الضروري الحفر بعناية ، حتى لا تلمس الأجزاء الداخلية من الماكينة ، فتحة من خلال قطر 3.2 مم أو قطعها بسكين قرطاسية. وكذلك قطع الأجزاء البارزة ("أجنحة" للتثبيت). نقوم بإدخال مسمار ملولب في الحفرة المصنوعة وإصلاحه بالمكسرات. على رمح المؤازرة نضع رافعة مع جزء مشدود من ليغو:

وعلى الجانب الآخر:
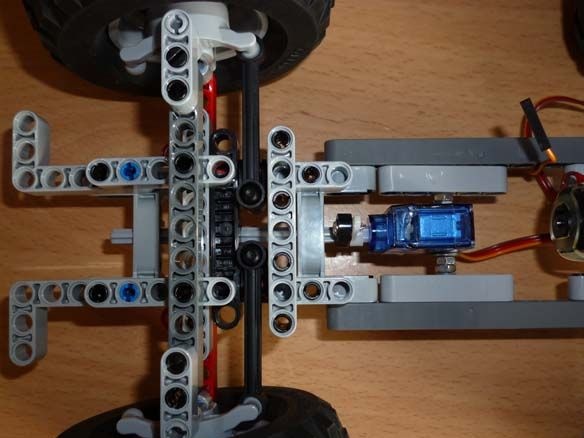
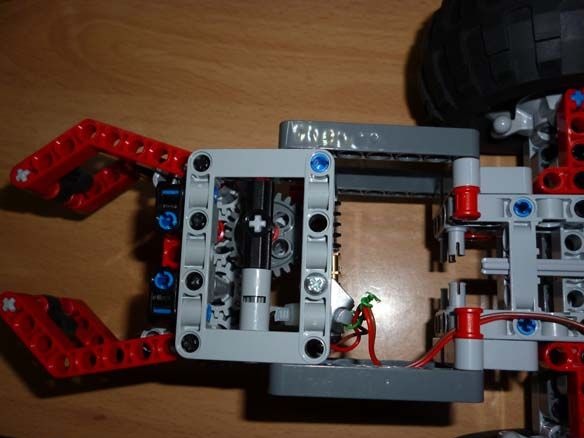
الخطوة 3 تجميع القاعدة والكابينة
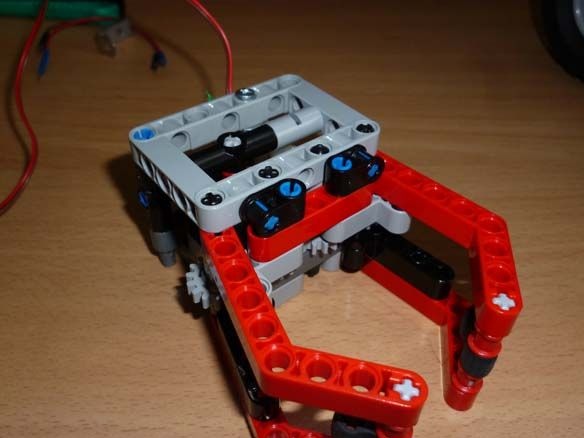
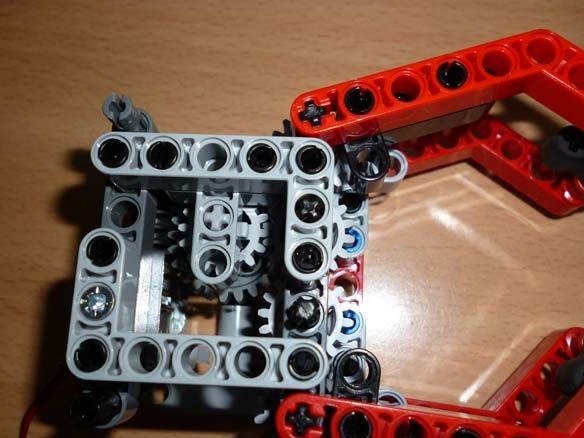
نقوم بتوصيل الجسرين كما هو موضح في الصورة:

نقوم بتجميع المقصورة (اللازمة للجمال):
نضع المقصورة على أساس:

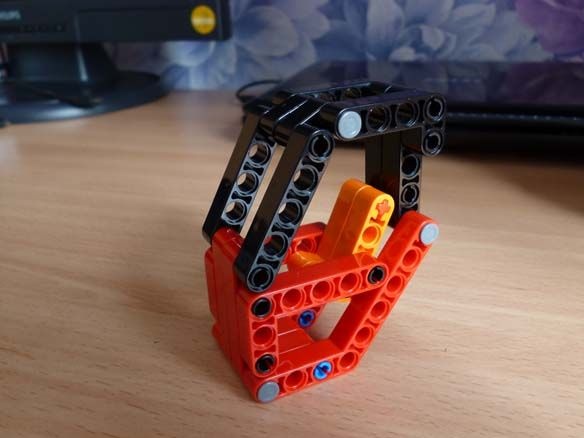
الخطوة 4 وضع غطاء أو مخلب
يتم تشغيل المخلب بواسطة علبة تروس بمحرك صغير بسرعة 50 دورة في الدقيقة. لقد قمت بحل مشكلة توصيل محرك التروس بأجزاء المصمم على النحو التالي: وضعت كم توصيل على محور محرك التروس وأدخلت خردة من مباراة لإصلاحها. للتركيب ، استخدم محرك التروس البلاستيك المعدني من مصمم الحديد والمشبك. اتضح ما يلي:

بعد ذلك ، نجمع المخلب نفسه من الصورة:

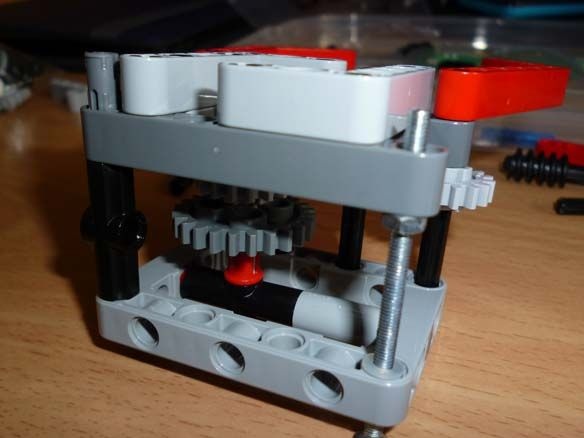
نقوم بإصلاحه على القاعدة:

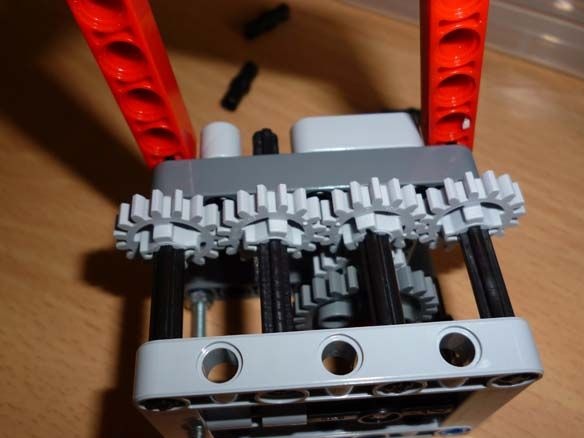
إن علبة تروس المحرك الصغيرة بسرعة 100 دورة في الدقيقة مناسبة لرفع المخلب:


الخطوة 5 كهربائي
سنستخدم Arduino Pro Mini ووحدة Bluetooth للتحكم. هناك حاجة لسائقي السيارات لتوصيل المحركات.
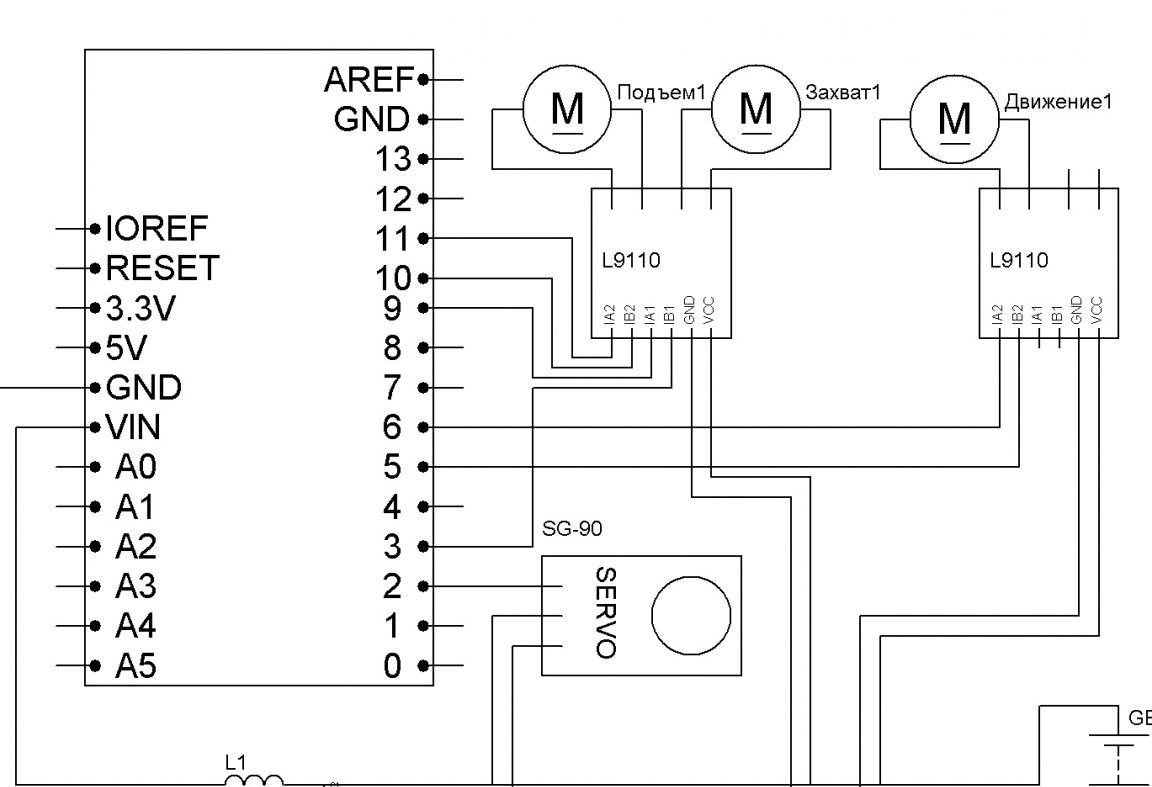
توصيل جميع المكونات بأسلاك دوبونت من الأم إلى الأم.الطاقة - 6 بطاريات NI-Mn 1.2v 1000mA متصلة في سلسلة. مكثف من أي طاقة منخفضة ، مغو ستجد أيضا ، تحتاج إلى تثبيت قوة متحكم. ترتبط الأنودات من المصابيح LED بـ 4 دبوس اردوينو ، الكاثودات إلى GND. يتم اختيار المقاومات لمصابيح LED المستخدمة. للراحة ، لف البطاريات بشريط.

نلصق كل ذلك على شريط مزدوج الوجه على أساس:

الخطوة 6 إعداد Bluetooth
تعد وحدات HC-05 و HC-06 من أكثر وحدات البلوتوث بأسعار معقولة اليوم. فهي وفيرة في المتاجر الصينية عبر الإنترنت. الاختلافات بينهما هي أن الأول يمكن أن يعمل في الوضع الرئيسي (الرقيق) وفي الوضع الرقيق (الرئيسي). والثاني هو جهاز تابع بحت. بمعنى آخر ، لا يمكن لـ HC-06 اكتشاف جهاز مقترن وإنشاء اتصال به ، بل يمكنه فقط إطاعة السيد.
الخصائص الموجزة للوحدات:
- رقاقة بلوتوث - BC417143 المصنعة من قبل
- بروتوكول الاتصال - مواصفات Bluetooth v2.0 + EDR ؛
- نصف قطر الحركة - حتى 10 أمتار (مستوى الطاقة 2) ؛
- متوافق مع جميع محولات Bluetooth التي تدعم SPP ؛
- مقدار ذاكرة الفلاش (لتخزين البرامج الثابتة والإعدادات) - 8 ميغابت ؛
- تردد الإشارة اللاسلكية - 2.40 .. 2.48 جيجا هرتز ؛
- واجهة المضيف - USB 1.1 / 2.0 أو UART ؛
- استهلاك الطاقة - التيار أثناء الاتصال 30-40 مللي أمبير. يبلغ متوسط القيمة الحالية حوالي 25 مللي أمبير. بعد إنشاء الاتصال ، يكون التيار المستهلك 8 مللي أمبير ، ولا يوجد وضع سكون.
عادة ، يتم بيع الوحدات على شكل لوحين ملحومين معًا. الأصغر هو وحدة مصنع ، تستخدم على نطاق واسع في مختلف إلكتروني الأجهزة. كبير - لوحة توصيل خاصة لـ DIY. يبدو وكأنه لوحة أصغر مع رقاقة BC417:

وهكذا فإن وحدات DIY HC-05 و HC-06 نفسها:
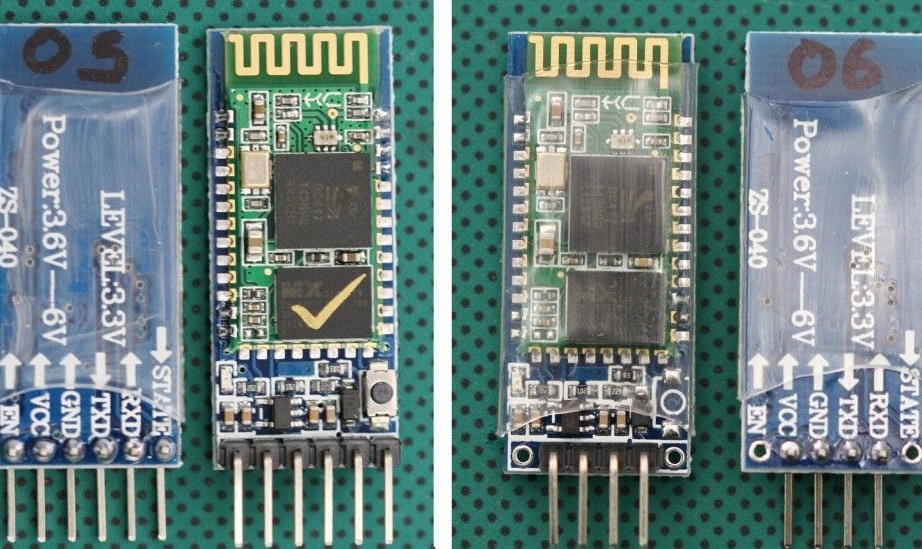
من حيث المبدأ ، يمكنك استخدام أي وحدة تريدها. تكلف الوحدة التي لا تحتوي على لوحة توصيل ، ولكن عليك بعد ذلك الاهتمام بمصدر الطاقة 3.3 فولت للوحدة وتعذيب نفسك عن طريق لحام الأسلاك في الوحدة. لقد اخترت الأمثل ، في رأيي ، في نسبة السعر / الوظيفة HC-06.
نربط على النحو التالي:
اردوينو برو ميني - بلوتوث
D7 - RX
D8 - TX
5 فولت - VCC
GND –GND
للتشغيل السليم ، يجب تكوين الوحدة النمطية. سنقوم بتكوين أوامر AT المدخلة في نافذة المحطة الطرفية. أعطي مثالا لإعداد وحدة HC-05. إذا كان لديك إعداد مختلف قد يكون مختلفًا. لكي تتلقى وحدتنا الأوامر ، نقوم أولاً بوميض Arduino بالبرامج الثابتة التالية:
في هذه الحالة ، يعمل Arduino كجسر بين أجهزة الكمبيوتر والوحدة النمطية. في البرامج الثابتة ، أستخدم مكتبة SoftwareSerial. بسرعات عالية ، يعمل بشكل غير مستقر. إذا كنت تريد سرعة عالية ، يمكنك توصيل الوحدة مباشرة بجهات اتصال Arduino RX و TX وإعادة كتابة البرامج الثابتة. ولكن في حالتي ، سنعمل مع الوحدة بسرعة 9600. لذا بعد البرنامج الثابت ، افتح الطرفية وأدخل:
"AT" (بدون علامات اقتباس) يجب أن تأتي الإجابة "OK" (هذا يعني أن كل شيء متصل بشكل صحيح وأن الوحدة النمطية تعمل)
"AT + BAUD96000" (بدون علامات الاقتباس) يجب أن تأتي الإجابة "OK9600".
إذا كانت لديك الإجابة الصحيحة ، فانتقل إلى الخطوة التالية.
الخطوة 7 البرامج الثابتة
لكتابة البرامج الثابتة والبرامج الثابتة نفسها ، أستخدم Arduino IDE. الإصدار الحالي لهذا اليوم هو 1.8. في الواقع البرامج الثابتة:
الخطوة 8 قم بإعداد هاتفك.
على هاتف Android ، تحتاج إلى تثبيت برنامج للتحكم في الروبوت عبر Bluetooth. هناك الكثير منهم. يمكنك إدخال "Bluetooth Arduino" في Google play واختيار ذوقك. أنا أحب تحكم BT. قم بتنزيله وتثبيته على هاتفك أو جهازك اللوحي الذي يعمل بنظام Android. بعد ذلك ، من خلال إعدادات Android ، تحتاج إلى إنشاء اتصال مع وحدتنا. كلمة السر للاتصال هي "1234" أو "0000". بعد ذلك ، قم بتكوين البرنامج للأوامر المناسبة. القائمة أدناه.
الخطوة 9 إعداد الكمبيوتر (إذا لزم الأمر)
إذا لزم الأمر ، أو لمجرد الراحة للتحكم ، يمكنك استخدام جهاز كمبيوتر أو كمبيوتر محمول. للقيام بذلك ، يجب أن يكون الكمبيوتر Bluetooth. نقوم بإنشاء اتصال مع وحدتنا من خلال عناصر التحكم على الكمبيوتر. بعد ذلك ، نحتاج إلى محطة طرفية لإرسال الأوامر. أي مناسبة لك. بعد تسجيل البرنامج الثابت ، يتم التحكم في الأزرار التالية (الأوامر):
W - للأمام
S - ظهر
أ- يسار
د - حق
و - توقف
ز - عجلة القيادة
ك - المصابيح الأمامية
لام - إيقاف المصباح
R - ارفع
ه - انحدار
س - توقف المصعد
التقاط T
ص - الإصدار
ح - أوقف المخلب
إدخال الأوامر باستمرار أمر غير مريح ، لذلك أوصي باستخدام البرنامج لإرسال الأوامر. أنا أستخدم Z-Controller.في البرنامج ، حدد المنفذ (منفذ com الذي يتم من خلاله الاتصال) وقم بتكوين مفاتيح الأوامر. قم بإعداد الخمول وبديهية.
