
المواد والأدوات:
- متحكم اردوينو (في هذا محلية الصنع يطبق Arduino Uno Rev 3) ؛
- اثنين من الماكينات من Parallax ؛
- عصا التحكم (أيضًا من Parallax) ؛
- لوحة الدوائر) صغيرة) ؛
- موصلات للتوصيل ؛
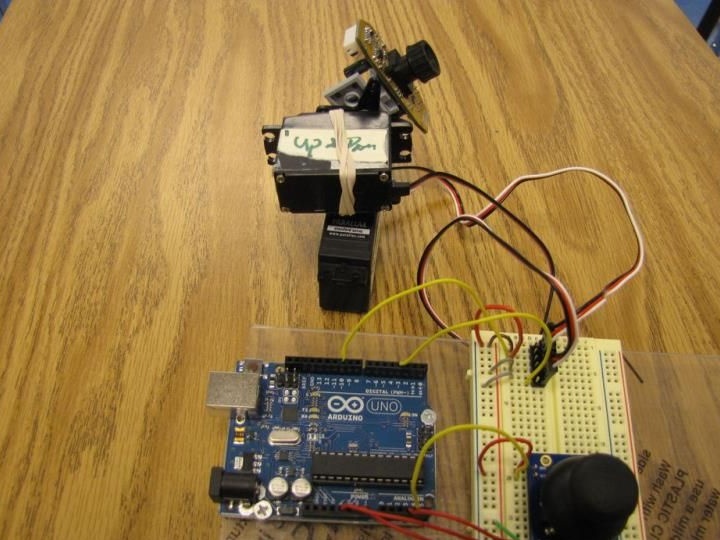
- جهاز لتتبع حركة المحركات (يتم استخدام كاميرا ويب مكسورة ومكعبات ليغو).
عملية التجميع محلية الصنع:
الخطوة الأولى. نحن نربط المحركات المؤازرة
تبدأ عملية التجميع محلية الصنع بتوصيل المحركات المؤازرة. من أجل تجميع تخطيط أولي ، يتم استخدام لوحة الدوائر. ثم سيكون من الممكن عمل درع منفصل. في الشكل ، يمكنك أن ترى كيف يتم توصيل كل شيء بالضبط.
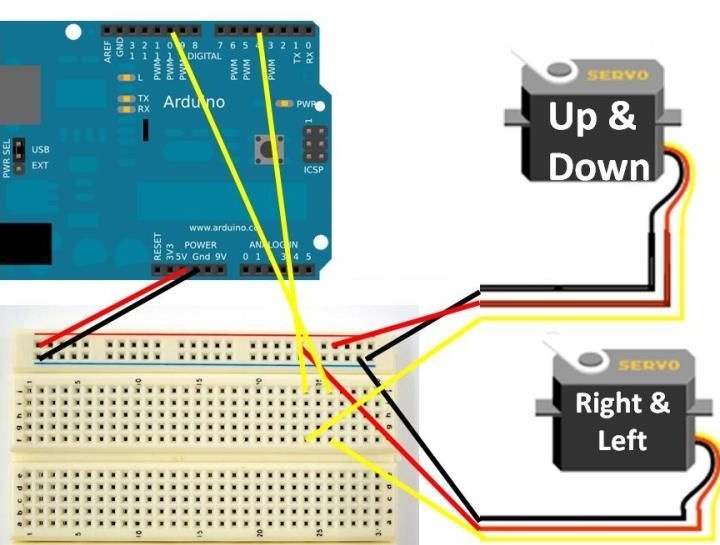
الكبل الأحمر هو الطاقة ، فهو يتصل بدبوس 5V على وحدة تحكم Arduino.
السلك الأسود هو ناقص (أرضي) ، وهو يتصل بإخراج Arduino المسمى GND.
يجب توصيل الكبل الأصفر من المحرك المؤازر الأيمن والأيسر بالطرف 11. في بعض الموديلات ، يمكن أن يكون أبيض.
يجب توصيل كبل أصفر أعلى وأسفل مشابه بالطرف 4. يمكن أن يكون أبيض أيضًا في بعض طرز المحرك.
من المهم أن نتذكر أن موصلات الإشارة المستخدمة للتحكم في المحرك تأتي من مخرجات PWM.
الخطوة الثانية قم بتوصيل عصا التحكم
يمكن رؤية كيفية توصيل عصا التحكم في الصورة. في البداية ، قد يبدو المخطط معقدًا إلى حد ما ، ولكن في الواقع لا يوجد شيء معقد هنا. كما هو الحال مع المحركات ، يتم استخدام لوحة الأسلاك هنا.
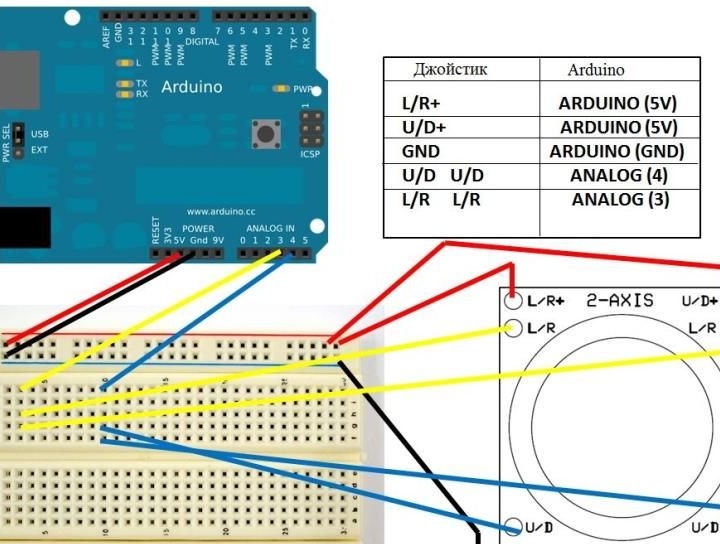
1. في وحدة عصا التحكم ، يمكنك العثور على مخرجات U / R + و L / R +. من خلال هذه المخرجات ، يتم توصيل الطاقة. وفقًا لذلك ، تحتاج إلى تطبيق جهد + 5 فولت من الدبوس المقابل إلى Arduino.
2. يوجد أيضًا موصلين تحت ذراع التحكم يسمى L / R وموصلين U / D. يجب أن تكون متصلة بمخرجات تناظرية A3 و A4.
3. حسنًا ، في الختام ، يجب توصيل الأرض الموجودة على عصا التحكم بالأرض الموجودة على أردوينو.
بعد التجميع ، يجب التحقق من الاتصال مرتين. بسبب أخطاء الاتصال التي تنشأ في معظم الحالات. هذا صحيح بشكل خاص عند استخدام لوحة دائرة كهربائية وهناك العديد من الوصلات عليها.
الخطوة الثالثةرسم لاردوينو
الرمز بسيط للغاية ويحتوي على تعليقات مفصلة. يجب نسخ الرمز أعلاه فقط إلى Arduino IDE. بمجرد تحميل الرمز ، يجب ألا تتحرك المحركات. يجب أن يبدأوا في التحرك فقط عند الضغط على الزر الموجود على عصا التحكم.
المشاكل التي قد تنشأ وكيفية حلها
1. في حالة عدم تشغيل المحركات ، تحقق جيدًا من الاتصال. يتم استخدام مخرجات PWM لربط المحركات ، وتستخدم المخرجات التناظرية لتوصيل عصي التحكم.
2. يحدث أنه بمجرد تحميل الرمز ، تبدأ المحركات في الاهتزاز. يحدث هذا إذا قمت بشكل غير صحيح بتوصيل الدبابيس U / D + L / R +. يجب التحقق من الاتصال بعناية. لكي لا تحرق اللوحة أثناء الاختبار ، يجب فصلها عن الكمبيوتر.
3. إذا تم إعادة فحص كل شيء ، ولكن المحركات لا تزال لا ترغب في العمل ، يمكنك محاولة إعادة توصيل عصا التحكم. يجب إزالته من لوحة الدارات الكهربائية ، ثم تثبيته مرة أخرى ببعض الجهد. يجب أن تتناسب موصلات عصا التحكم بشكل جيد مع التصميم.
إذا تحول كل شيء ، يمكنك الآن البدء في إنشاء أي عناصر محلية الصنع مع التحكم عبر عصا التحكم. على سبيل المثال ، يمكنك إنشاء روبوت يمكن التحكم فيه بواسطة عصا التحكم ، وأكثر من ذلك بكثير.