
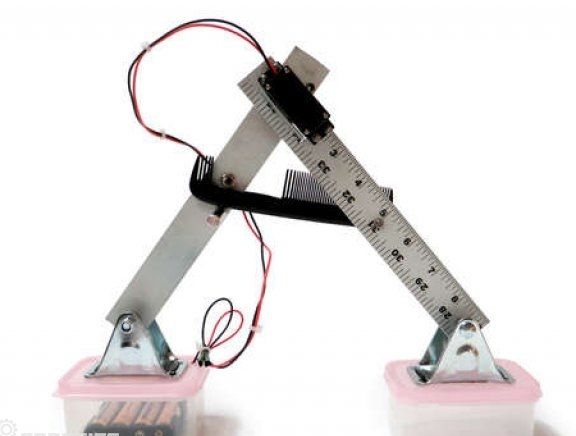
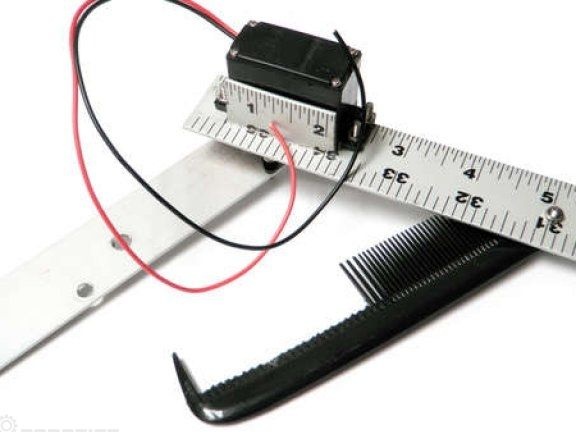
تكمن خصوصية مثل هذا الروبوت في أنه يتم تجميعه من خط القياس والأدوات المنزلية. الروبوت يشير إلى نوع المشي. وفقا للمؤلف ، مع جميع الأدوات والمواد اللازمة ، سيستغرق تجميع هذا الروبوت بضع ساعات فقط.
مواد وأدوات التجميع:
- محرك مؤازر للدوران المباشر ؛
- حكام ألومنيوم مقاس 2-18 بوصة ؛
- حاويتان صغيرتان للطعام ؛
- بكرتان بعجلات 2 "- 3" في الحجم ؛
- قلم حبر جاف عادي ؛
- إسكالوب واحد ؛
- عشرة مسامير صغيرة بصواميل ؛
- أربع غسالات صغيرة ؛
- ثقل موازن معدني 2 "- 3" ؛
- أربعة مسامير ؛
- نوع تحويل واحد DPDT ؛
- حامل بطارية AA ؛
- أربع بطاريات AA ؛
- سلكان من ألوان مختلفة (أسود وأحمر) ؛
- شريط كهربائي.

عملية التصنيع للروبوت:
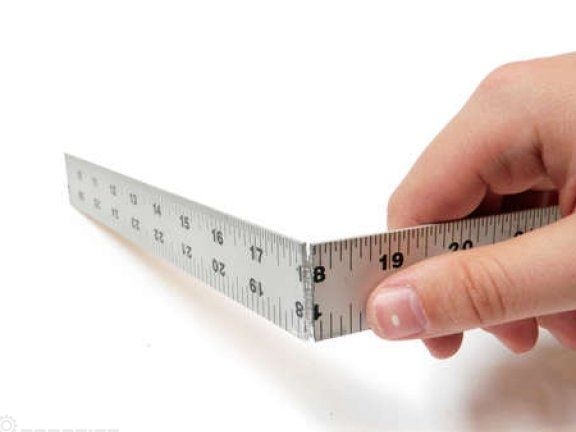
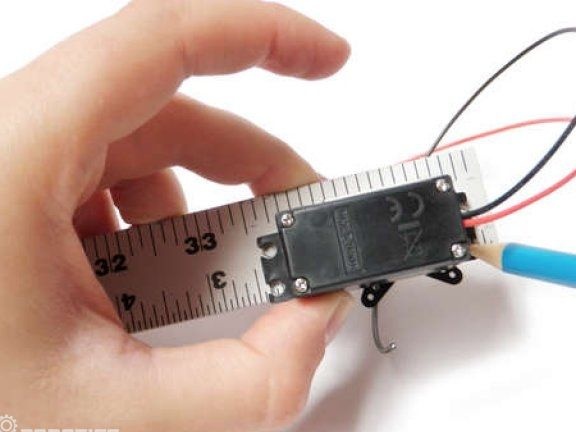
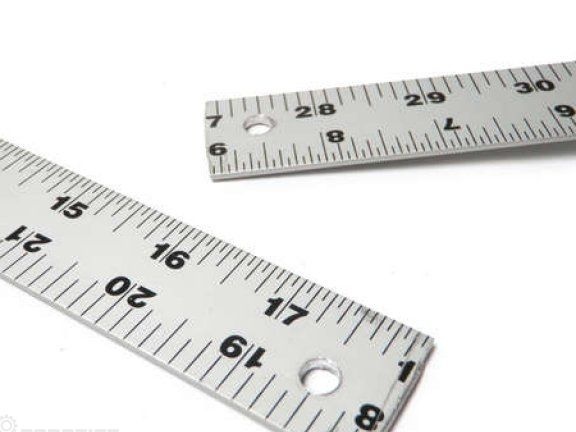
الخطوة الأولى. قطع المسطرة
تحتاج أولاً إلى أخذ مسطرة وقطعها بمنشار مقعد. في المجموع ، يجب الحصول على جزأين من تسع بوصات.



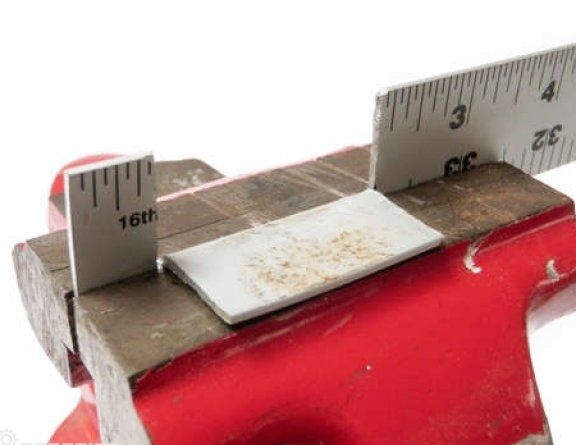
الخطوة الثانية إنشاء علامات
على قطعة واحدة من المسطرة تحتاج إلى عمل شقين 3/4. من حافة واحدة ، يجب أن يكون عمقها 1/2 "، ومن الطرف الآخر 2-1 / 8". بعد ذلك ، يجب أن يتم تثبيت المسطرة في نائب واستخدام المطرقة لثني القسم ، سيكون هذا هو الأساس لتركيب المحرك.



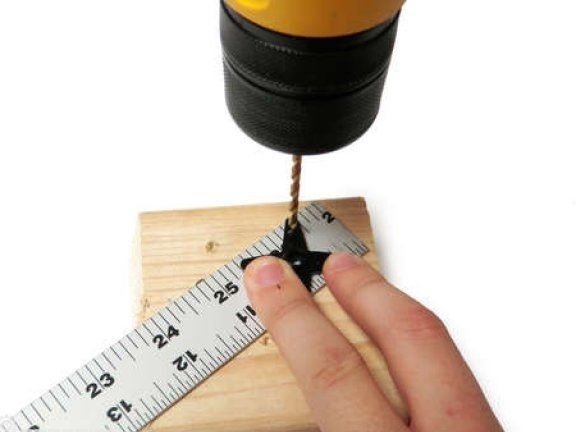
الخطوة الثالثة ثقوب الحفر
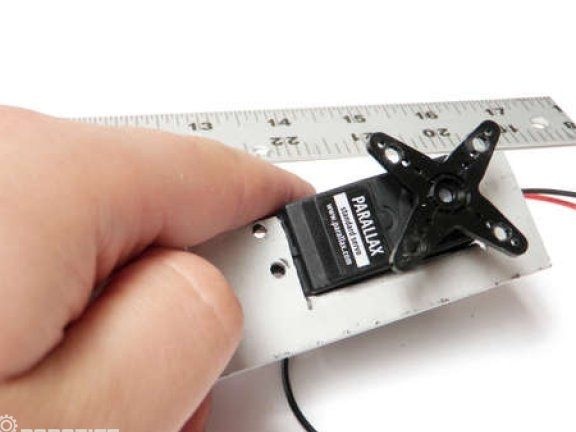
الآن تحتاج إلى أخذ المحرك المؤازر وإرفاقه بالمكان الذي سيتم تركيبه فيه. ثم باستخدام قلم رصاص تحتاج إلى وضع علامات حيث تحتاج بعد ذلك إلى حفر ثقوب بقطر 1/8 ".



الآن تحتاج إلى حفر حفرة 1/4 "، والرجوع من نهاية المسطرة 1/2". يتم حفر الثقب في الطرف المقابل حيث سيتم تثبيت المحرك. يجب حفر نفس الفتحة في نهاية قطعة أخرى من المسطرة.


الآن تحتاج إلى حفر ثقوب في شفرات المؤازرة ، لذلك يجب إزالتها. في المجموع ، تحتاج إلى حفر 4 ثقوب كما هو موضح في الصورة بقطر 1/8 ". بعد ذلك ، يجب إرفاق الشفرات بحافة المسطرة ، والرجوع من النهاية 1/2". الآن يجب عمل أربع فتحات مماثلة في المسطرة.





وأخيرًا ، تحتاج إلى حفر ثقوب 1/8 "، والرجوع من مكان تركيب المحرك 5". تحتاج أيضًا إلى حفر 3/16 فتحات في حامل المحرك. تحتاج أيضًا إلى حفر حفرة كبيرة أخرى تناسب مسامير المؤازرة. هذا كل شيء ، جميع الثقوب لتجميع الهيكل جاهزة.
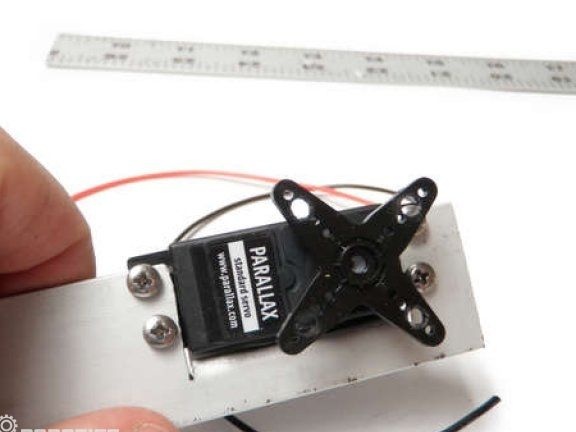
الخطوة الرابعة تركيب المحرك
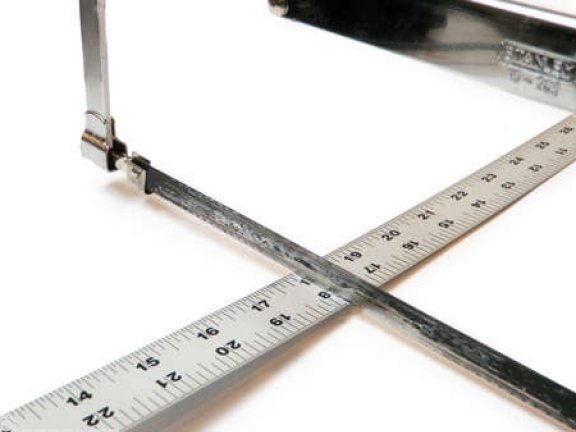
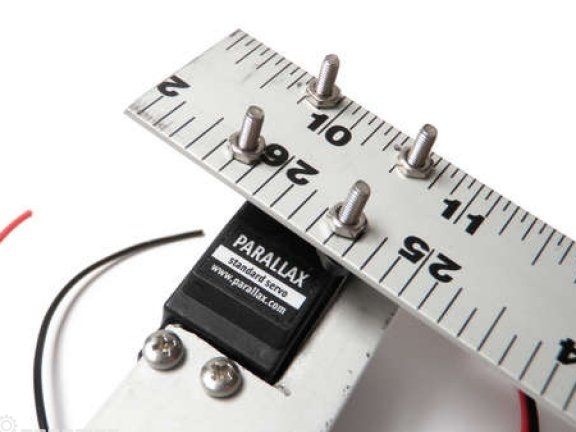
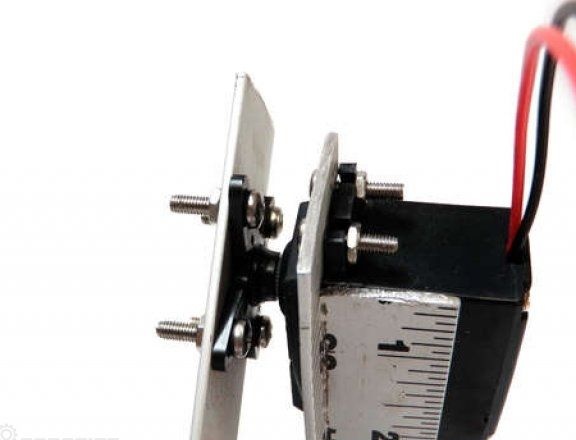
يجب تركيب المحرك على مسطرة مع صواميل وبراغي.لضمان المظهر الجانبي المنخفض ، يجب وضع رؤوس المسمار على جانب شفرات المؤازرة. بعد ذلك ، يجب إرفاق النصف الثاني من المسطرة بشفرة المحرك المؤازر. في هذه الحالة ، يجب أن تدور رؤوس البراغي للداخل بحيث لا يتداخل أي شيء مع حركة الحكام.

الخطوة الخامسة تحضير الإسكالوب
على جانب واحد من الإسكالوب ، يجب إزالة بوصتين من الأسنان. أسهل طريقة للقيام بذلك هي باستخدام قاطع جانبي. على حافة الإسكالوب ، تحتاج إلى ترك عدد معين من القرنفل ، بفضلها سيظل المشط على المسار الصحيح. على الحافة ، تحتاج إلى حفر حفرة 1/8 ". في المرحلة النهائية ، يتم صنفرة المشط بعناية باستخدام ورق الصنفرة إلى حالة ناعمة.






الخطوة السادسة تركيب الإسكالوب
يجب إدخال برغي في فتحة الإسكالوب ، وبعد ذلك يجب وضع غسالتين على البرغي ، سيسمحان لك بنقل المشط من المساطر إلى مسافة معينة. في المرحلة النهائية ، يتم تثبيت البرغي في المسطرة ، ثم يتم تثبيت الإسكالوب باستخدام الجوز.

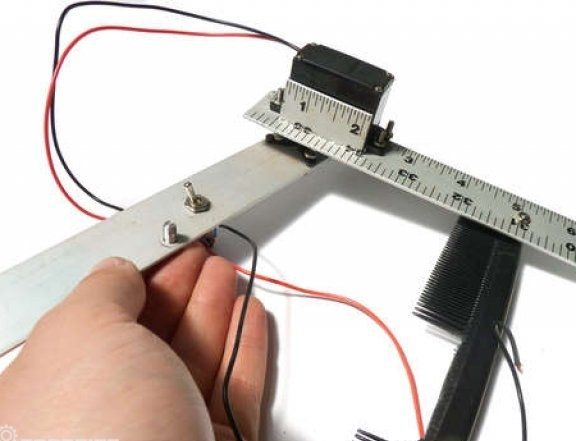
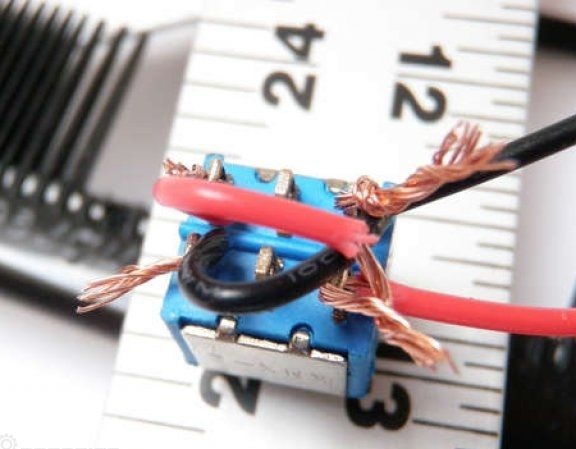
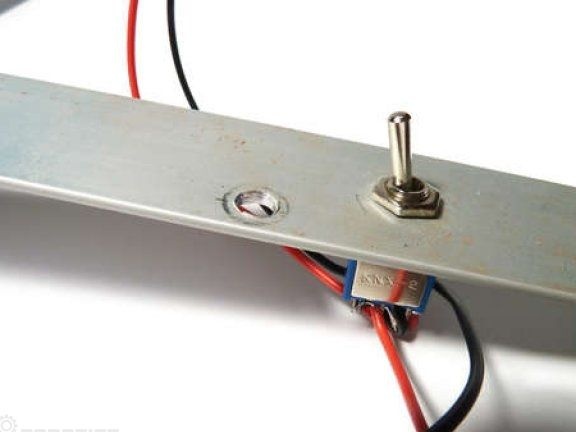
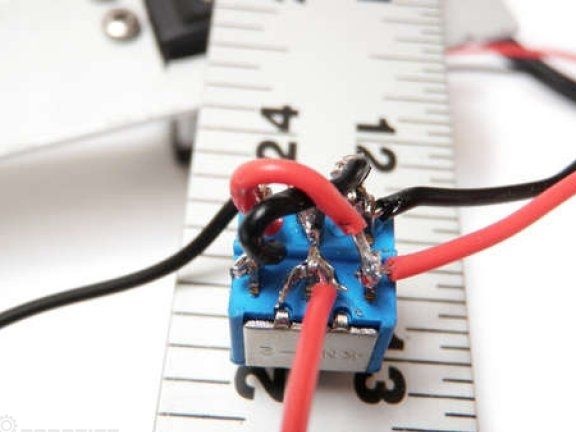
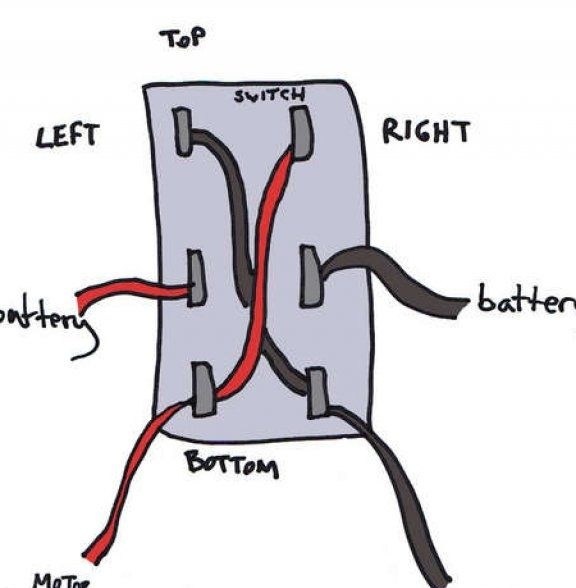
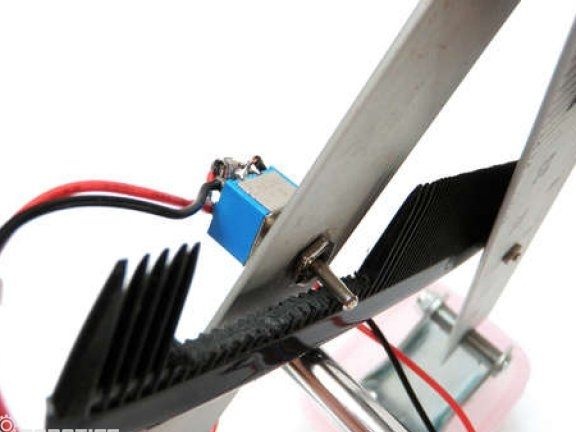
الخطوة السابعة. تصاعد التبديل
يجب إدخال المفتاح في الفتحة المحضرة وتثبيته بصمولة. يجب إدخال المفتاح في الوضع الموضح في الصور الفوتوغرافية. الآن تحتاج إلى أخذ قطعتين من الأسلاك ، الأحمر والأسود ، ولحامها في المفتاح كما هو موضح في الصورة. ثم تحتاج إلى لحام سلكين طويلين إلى جهات الاتصال الجانبية للمفتاح.

الخطوة الثامنة. تركيب ثقل موازن.
يتم تثبيت ثقل الموازنة في ذلك الجزء من الخط حيث يتم تثبيت المحرك المؤازر. تم تثبيت المشط فوق ثقل الموازنة.
الخطوة التاسعة. اقطع المقبض
خذ الأمبولة من قلم الحبر ثم قص القلم إلى قطعتين بوصة واحدة. بعد ذلك ، يجب قطع الأنابيب المصنعة إلى النصف ، ونتيجة لذلك ، ستخرج أربعة أنابيب.


الخطوة العاشرة استخلاص العجلة
الآن تحتاج إلى أخذ بكرتين وتفكيكها عن طريق إزالة العجلات. يجب وضع العجلات جانبًا ؛ يمكن استخدامها في غيرها محلية الصنع.



الخطوة الحادية عشرة. إنشاء نقاط محورية
يجب وضع الغلاف من الأسطوانة في وسط غطاء الحاوية البلاستيكية. الآن تحتاج إلى حفر أربعة ثقوب وتأمين العنصر بربطات.

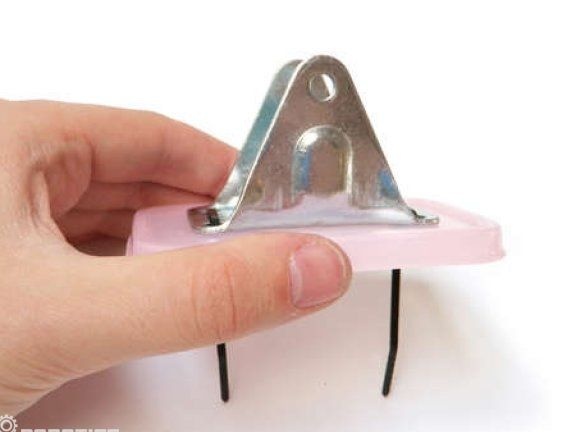

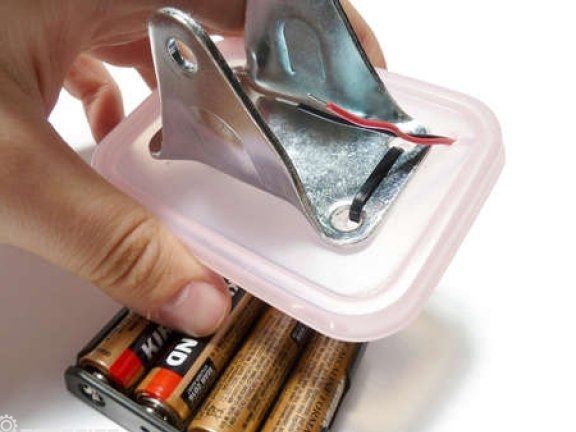


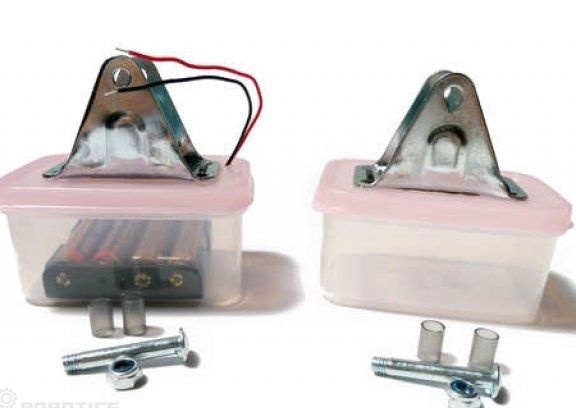

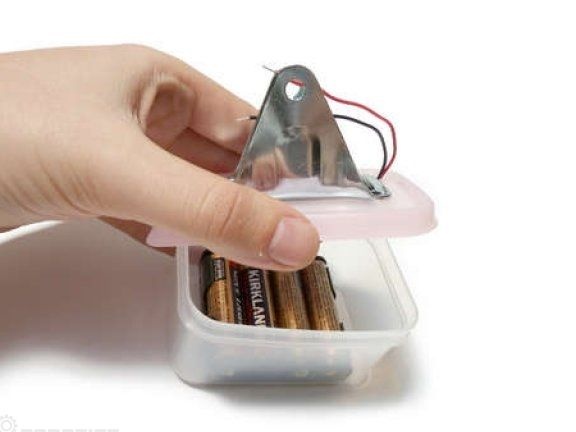

في هذه المرحلة أيضًا ، يمكنك تثبيت مصدر طاقة. للقيام بذلك ، في إحدى الحاويات تحتاج إلى حفر حفرة وتثبيت البطاريات في الداخل. بعد ذلك ، من خلال الثقب المحفور ، تحتاج إلى إخراج الأسلاك.
الخطوة الثانية عشرة. تجميع الروبوت
بجانب الدعامات تحتاج إلى إرفاق نهايات كلا الحكام كما هو موضح في الصور. الآن يبقى فقط لتوصيل الأسلاك من الطاقة والمفتاح ، من السهل القيام بذلك وفقًا لألوان الأسلاك.
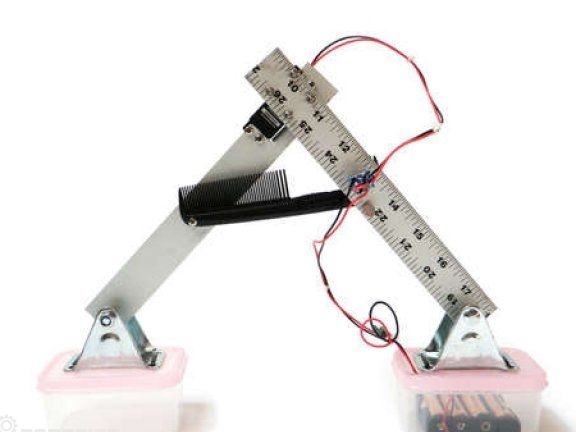
هذا كل شيء ، الروبوت جاهز. عندما يعمل المحرك ، يبدأ الروبوت في التحرك ، في مرحلة ما ، يوقف الإسكالوب الطاقة ويعود أرجل الروبوت إلى حالته الأصلية. ثم يقوم المفتاح بتشغيل الدائرة مرة أخرى ، ويتم ضغط أرجل الروبوت مرة أخرى. لذلك سيذهب.