


يقترح مؤلف Instructables تحت الاسم المستعار ShaneCunningham تنفيذ التتابع بالسعة اردوينو برمجيا. من الأجزاء الإضافية ، ستكون هناك حاجة إلى أجهزة استشعار ومقاومات سعوية فقط. لا مولدات أجهزة خارجية. في البرنامج محلية الصنع المعنية هذا و هذا تطورات الطرف الثالث.
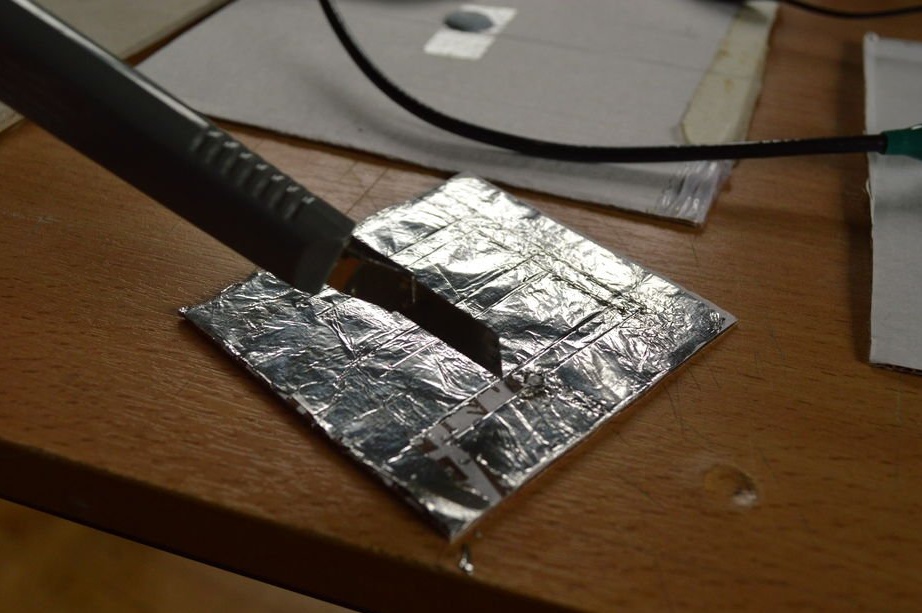
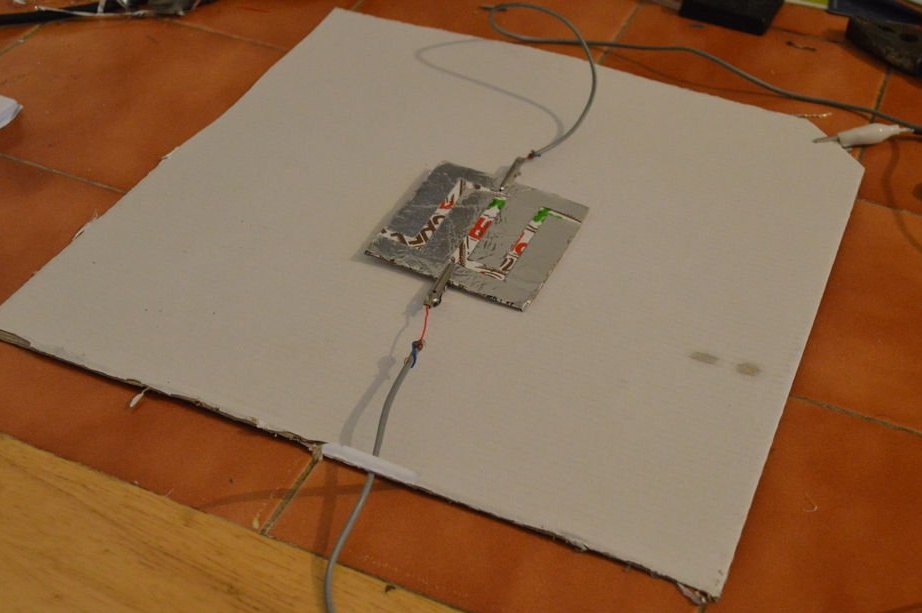
أجهزة استشعار سعوية - من طبقتين وثلاث دبابيس. السيد يجعلهم افعلها بنفسك. يتم تغطية مربع من الورق المقوى مع جانب 300 مم برقائق - وهذا سيكون الناتج المتصل بالسلك المشترك. على رأسها يضع مربع من الورق المقوى مع جانب 100 مم ، لاصق أيضًا بورق. تنقسم طبقة الفويل عليها إلى جزئين على طول كفاف مشابه لمذبذب الذبذبات المستطيلة. سيكون هذان استنتاجان أكثر.


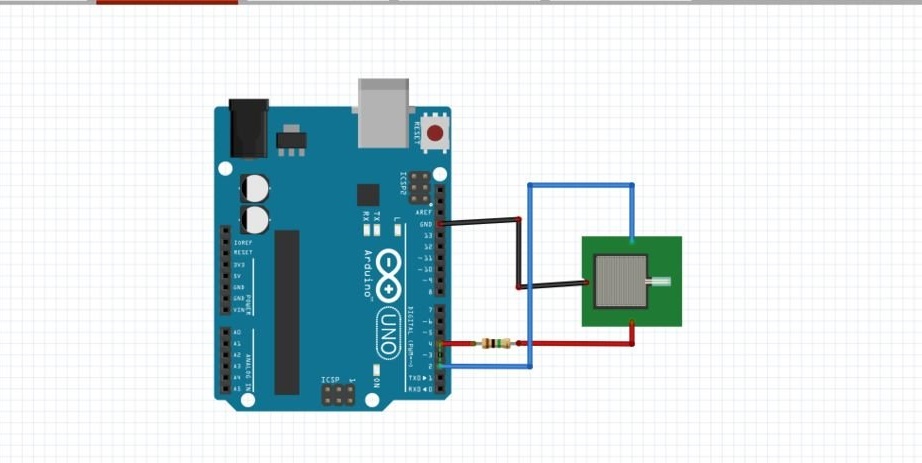
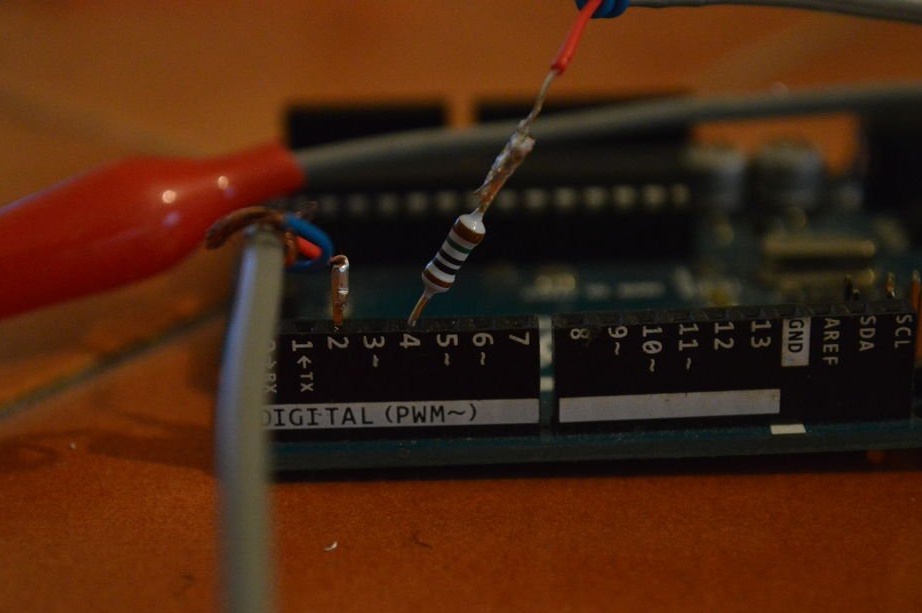
تم تجهيز كل من أجهزة الاستشعار المصنعة بمقاوم 1 متر مكعب. إذا كان هناك مستشعر واحد فقط ، فقم بتوصيله كما هو موضح أدناه. إذا كان هناك العديد منها ، فسيتعين عليك استخدام استنتاجات Arduino - اثنان لكل مستشعر - وأخذ هذا في الاعتبار في الرسم التخطيطي.
إليك ما يفعله المعالج:
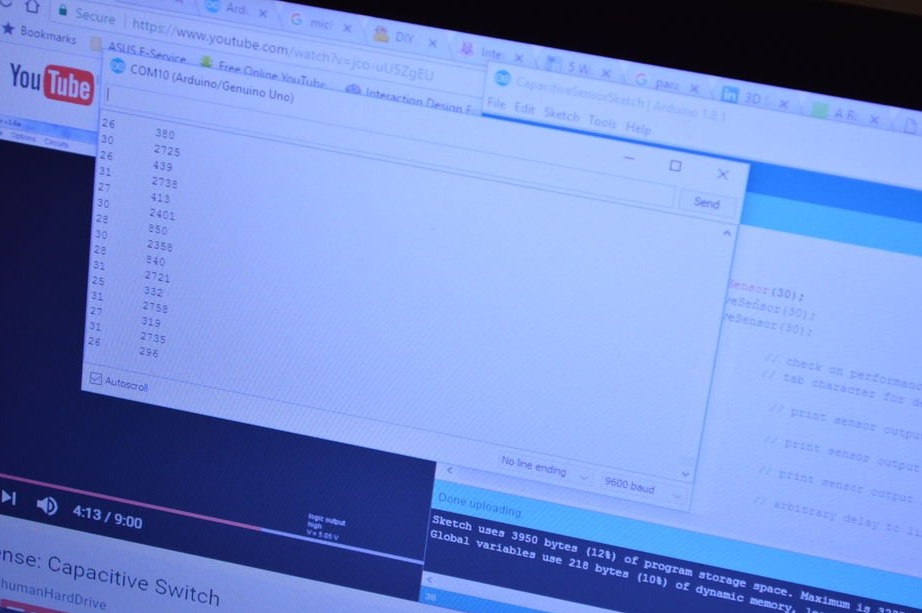
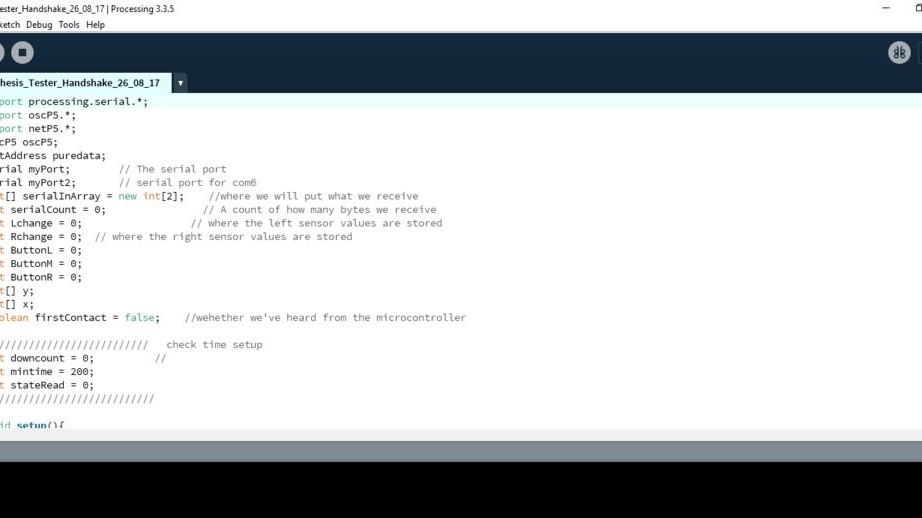
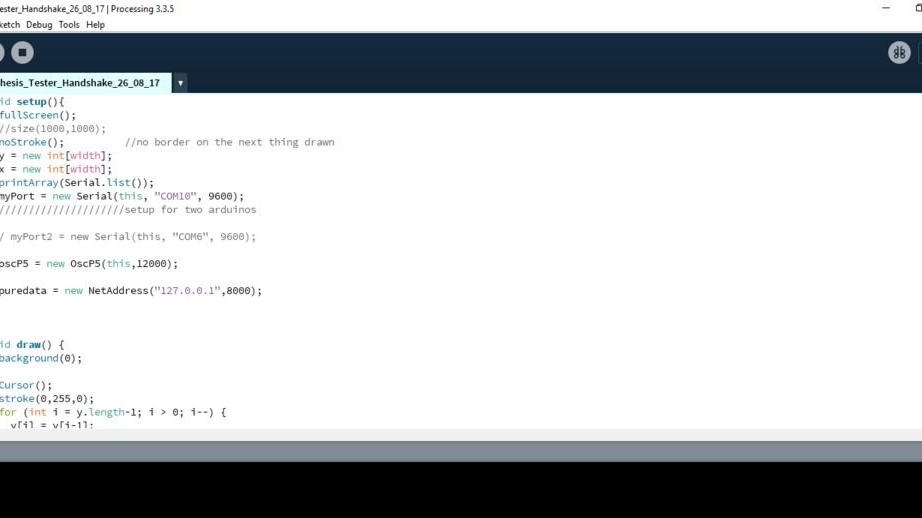
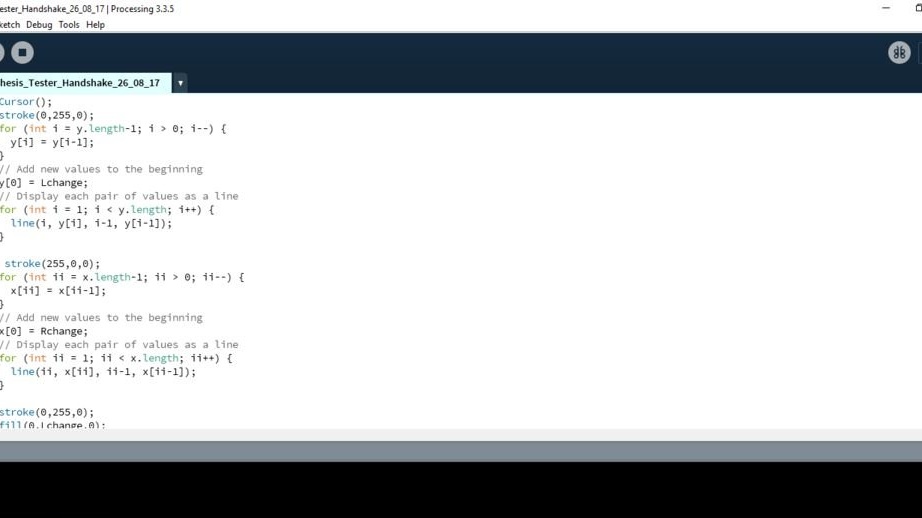
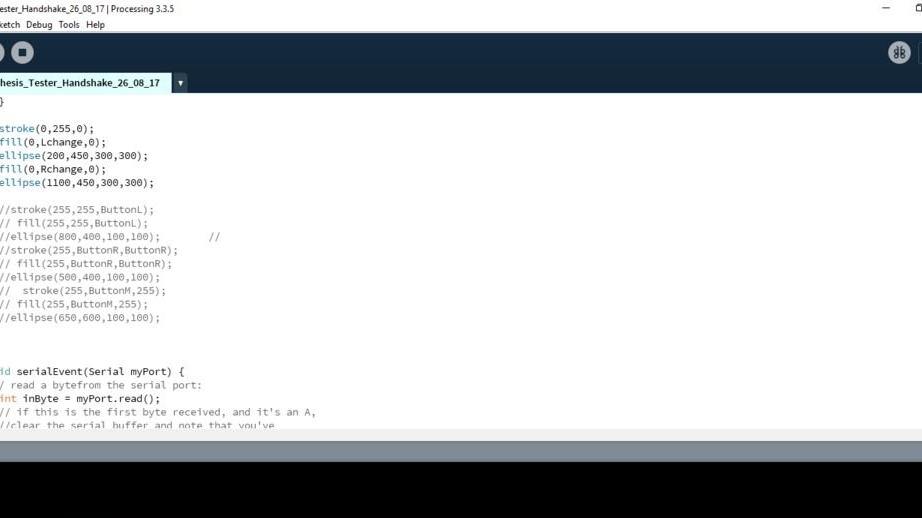
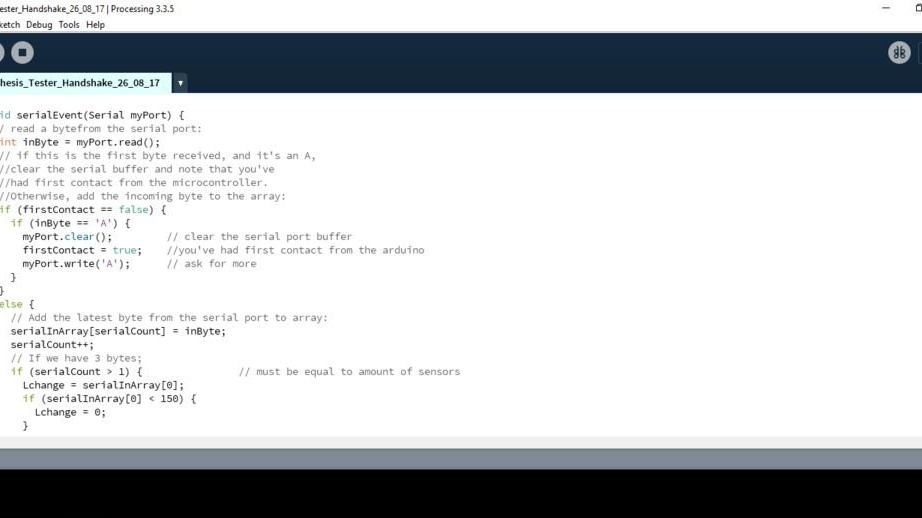
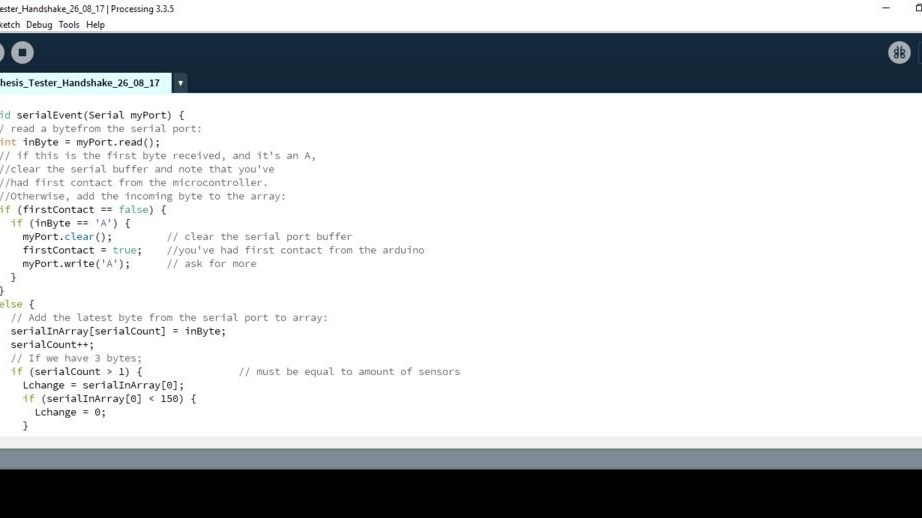
يؤلف رسمًا يرسل البيانات المأخوذة من المستشعر عبر الواجهة التسلسلية:
/////////////////////////////////////////
حلقة فارغة () {
المجموع الطويل 1 = cs_4_2.capacitiveSensor (30) ؛
Serial.println (المجموع 1) ؛
///////////////////////////////////////////
كود التواصل مع المعالجة عبر المسلسل
* /
int val1 = 0 ؛
int val2 = 0 ؛
int val3 = 0 ؛
int inByte = 0 ؛
CapacitiveSensor cs_4_2 = CapacitiveSensor (4.2) ؛ // 1 م مقاوم بين السنين 4 و 2 ، الطرف 2 هو دبوس مستشعر ، أضف سلكًا أو ورقًا إذا رغبت في ذلك
CapacitiveSensor cs_4_6 = CapacitiveSensor (4.6) ؛ // 1M المقاوم بين السنون 4 و 6 ، دبوس 6 هو دبوس الاستشعار ، إضافة سلك و / أو رقائق
إعداد باطل () {
cs_4_2.set_CS_AutocaL_Millis (0xFFFFFFFF) ؛ // off off autocalibrate on channel 1 - كمثال
cs_4_6.set_CS_AutocaL_Millis (0xFFFFFFFF) ؛
Serial.begin (9600) ؛
pinMode (2 ، INPUT) ؛
pinMode (6 ، INPUT) ؛
// pinMode (8، INPUT) ؛
إنشاء جهة اتصال () ؛ // إرسال بايت لإنشاء اتصال حتى يستجيب المتلقي
حلقة فارغة () {
// إذا حصلنا على بايت صالح ، اقرأ المدخلات:
if (Serial.available ()> 0) {
// الحصول على البايت الوارد:
inByte = Serial.read () ،
// long start = millis () ،
المجموع الطويل 1 = cs_4_2.capacitiveSensor (30) ؛
المجموع الطويل 2 = cs_4_6.capacitiveSensor (30) ؛
// long total3 = cs_4_8.capacitiveSensor (30) ؛
// تأخير (10) ؛
val1 = خريطة (المجموع 1 ، 700 ، 2300 ، 0 ، 255) ؛ // يتم تعيين قيم المستشعر من المعايرة إلى هنا - يبدأ في اكتشاف القرب البشري عند 700 (4 بوصات) ، ومن ثم لمس المستشعر تقريبًا عند 2300
val2 = خريطة (المجموع 2 ، 30 ، 175 ، 0 ، 255) ؛
// val3 = خريطة (المجموع 3 ، 0 ، 13000 ، 0 ، 255) ؛
Serial.write (val1) ؛
Serial.write (val2) ؛
//Serial.write(val3) ؛
//Serial.print(val1) ؛
// تأخير (50) ؛
}}
باطلة المنشأة () {
بينما (Serial.available () <= 0) {
Serial.print ('A') ؛
تأخير (300) ؛ }}يقوم المعالج بتنظيم المزيد من التحليل للمعلومات الواردة على جهاز الكمبيوتر في بيئة المعالجة.
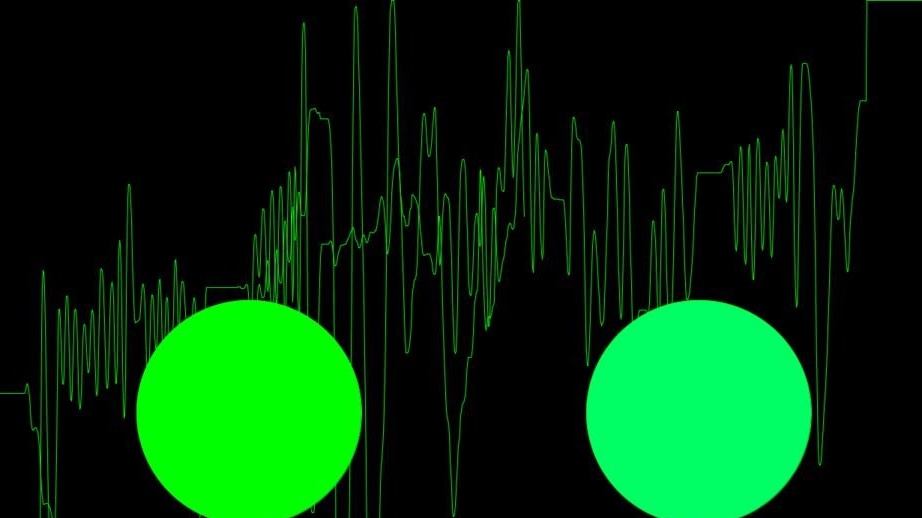
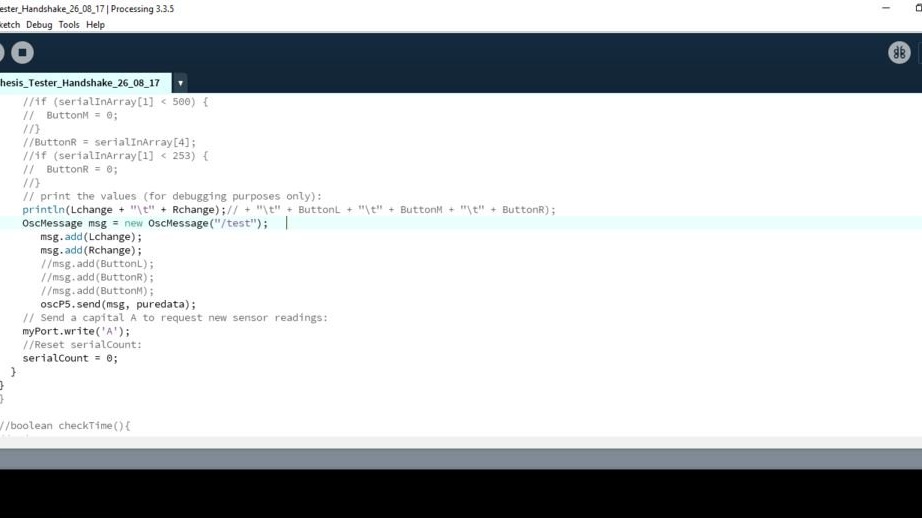
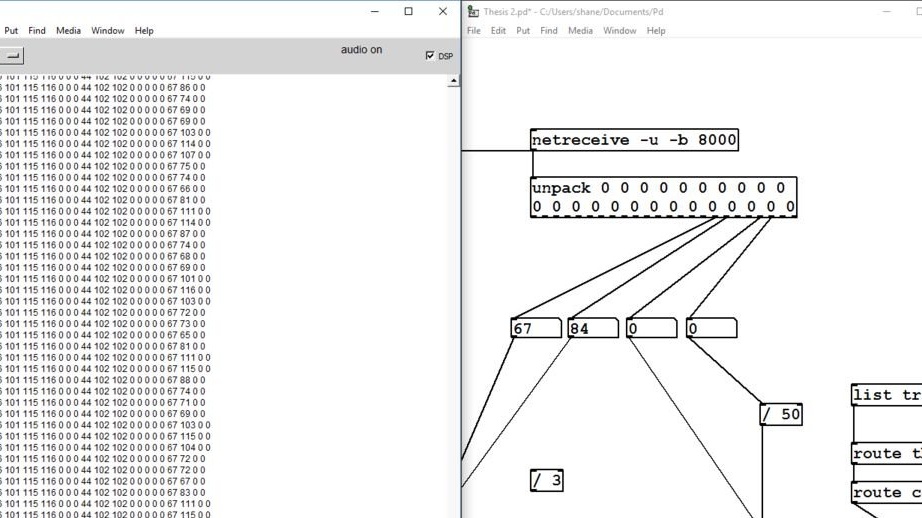
لكن هذه ليست سوى بداية التجربة. في المستقبل ، يمكنك استخدامه لمعالجة الإشارات من مستشعرات Arduino - نفس الشيء ، أو ، إذا لم تكن موارده كافية ، واحدة أخرى.