


أولاً ، دعنا نفهم الفرق بين octocopter و quadcopter. بالإضافة إلى الاسم ، هذا هو أيضًا عدد المحركات على القضبان. على سبيل المثال quadrocopter - أربعة محركات ، octocopter - ثمانية. وينطبق هذا أيضًا على السداسي - ستة ، الثلاثية - ثلاثة ، إلخ. إذا كانت الأدلة ، على سبيل المثال ، أربعة (X) ، وثمانية محركات ، فإن هذا لا يزال من نوع octocopter ، ولكن تم تعيينه كـ X8. على سبيل المثال على أربعة سكك ، ثمانية محركات.
في الأساس ، تكون الأرقام التي تحتوي على بادئة للمروحيات هي طائرات يتم التحكم فيها بواسطة إشارة راديو المشغل من الأرض. قرر طالب من الهند المضي قدمًا وصنع طائرة أوكتوكوبتر قادرة على رفع شخص في الهواء. هذا ليس مشروعًا رخيصًا. وقد تولت المؤسسة التعليمية التمويل.
الأدوات والمواد:
- محركات Turnigy CA170 Motors - 8 قطع ؛
- جهاز تحكم Turnigy Fatboy 300A - 4 قطع ؛
- جهاز تحكم Turnigy 200A HV - 4 قطع ؛
- جهاز الإرسال Hitech XG11 Tx / Rx ؛
- جهاز تحكم DJI A3 Pro ؛
- تحكم الطيران DJI Naza M V2 ؛
- بطارية Zippy 22.2V 5Ah 40C LiPo - 16 قطعة ؛
- شاحن 6S LiPo Charger ؛
-XT150 موصلات - 50 قطعة ؛
-سلك سليكون 8AWG - 10 أمتار ؛
الماكينات ؛
-كرة لعب الاسكواش (كرات الاسكواش) - 4 قطع ؛
- ورقة MDF 25 سم × 50 سم × 2 مم ؛
-حفر.
- طاحونة زاوية ؛
- المفكات.
- الشدات.
- زردية ؛
- قطع الليزر أو المنشار الحزامي ؛
- تشكيلة المكسرات 4 مم ، 6 مم و 8 مم ، براغي وغسالات.
-بورنر.
-LED LED ؛
- ملحقات لحام.
- سلك فولاذي 2 و 3 مم ؛
-Trerep برغي 100mm-200mm - 40 قطعة ؛
- 40 خطاف ومسامير للعين ؛
- مقياس سرعة الدوران Turnigy RPM ؛
-محلل الطاقة (Turnigy Wattmeter / Ampmeter) ؛
- تحكم البطارية ؛
- أنابيب الألمنيوم ؛
-لوحة الألومنيوم ؛
- شريط مزدوج الجوانب ؛
- آلة لحام.
-روليت
-الكمبيوتر مع فيوجن 360 ؛
- بطارية 11.1 فولت 2200 مللي أمبير LiPo 30C ؛
- قماش كثيف 1.2 م × 1.2 م ؛
- خيط قوي وإبرة.
-حزام الأمان ؛
الخطوة الأولى: التصميم
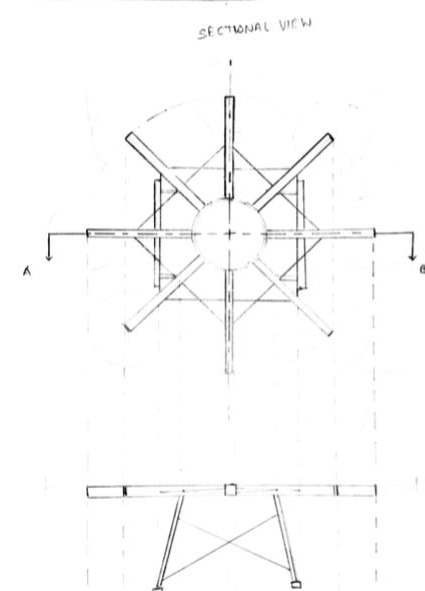
عند تطوير oopocopter المأهولة ، نظر السيد في خيارات التكوين المختلفة ، و X8 و H ، و T ، لكنه توصل إلى استنتاج مفاده أن الأكثر مثالية ، ولأسباب مختلفة ، هو تصميم octocopter ، وفقًا للمخطط التقليدي.
ثم كان من الضروري معرفة حجم الأوكتوكوبتر. تم إجراء الحسابات باستخدام نماذج CAD على Fusion 360 كمثال. وتبين أن قطر المثلى هو ثلاثة أمتار وارتفاع متر واحد. سلة داخلية لشخص 55x55 سم.

الخطوة الثانية: عربة التسوق
تم لحام الإطار من شكل مربع من الألمنيوم مع رف 50 مم وسمك جدار 2 مم.
تم قطع واللحام الملف الشخصي. يتم تنظيف اللحامات.



الخطوة الثالثة: تركيب الألواح
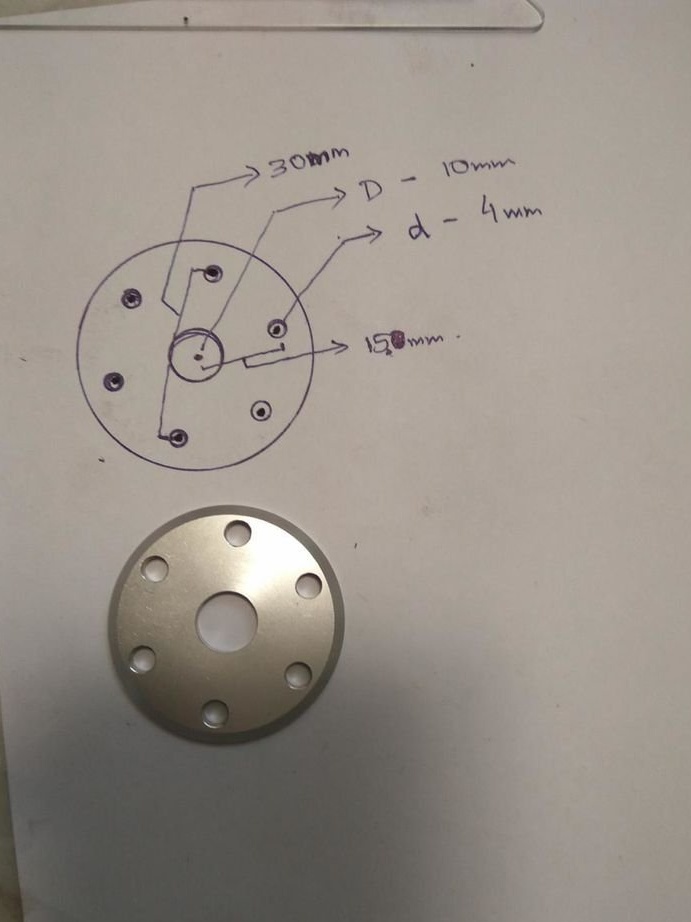
بالنسبة للأقواس ، استخدم السيد صفائح الألومنيوم 1.5 مم. هناك ثمانية أقواس في المجموع ، أربعة في الزوايا ، وأربعة في منتصف الإطار. يبلغ طول كتف الذراع والجزء الداعم 15 سم لكل منهما ، وقد تم تصميم الأقواس في Fusion 360. وتم قطع الألواح بقطع تفريز. يتم حفر ثقوب التثبيت فيها. ثم تم لحام الأقواس في الإطار.

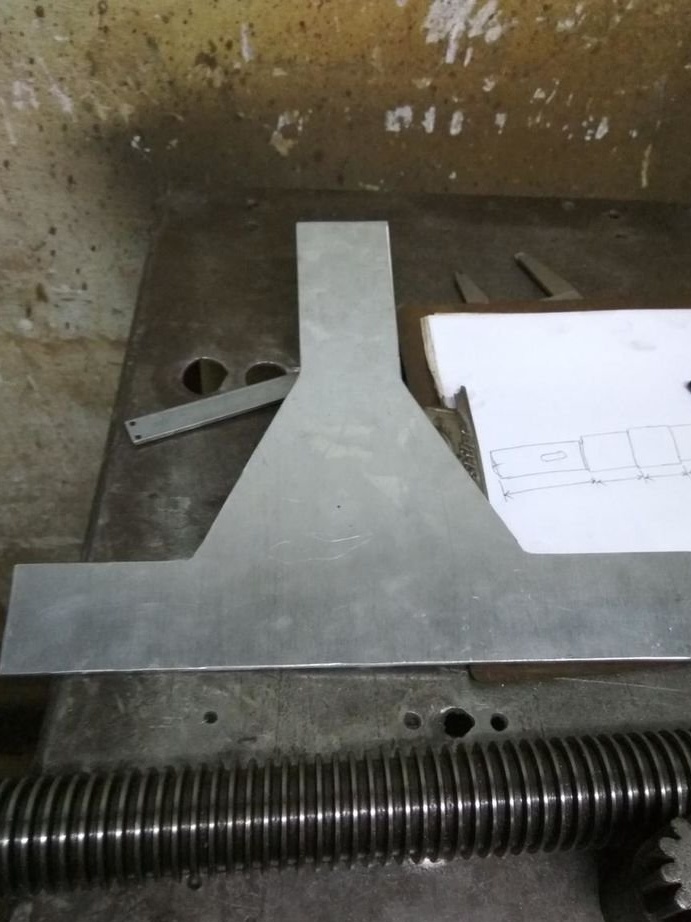





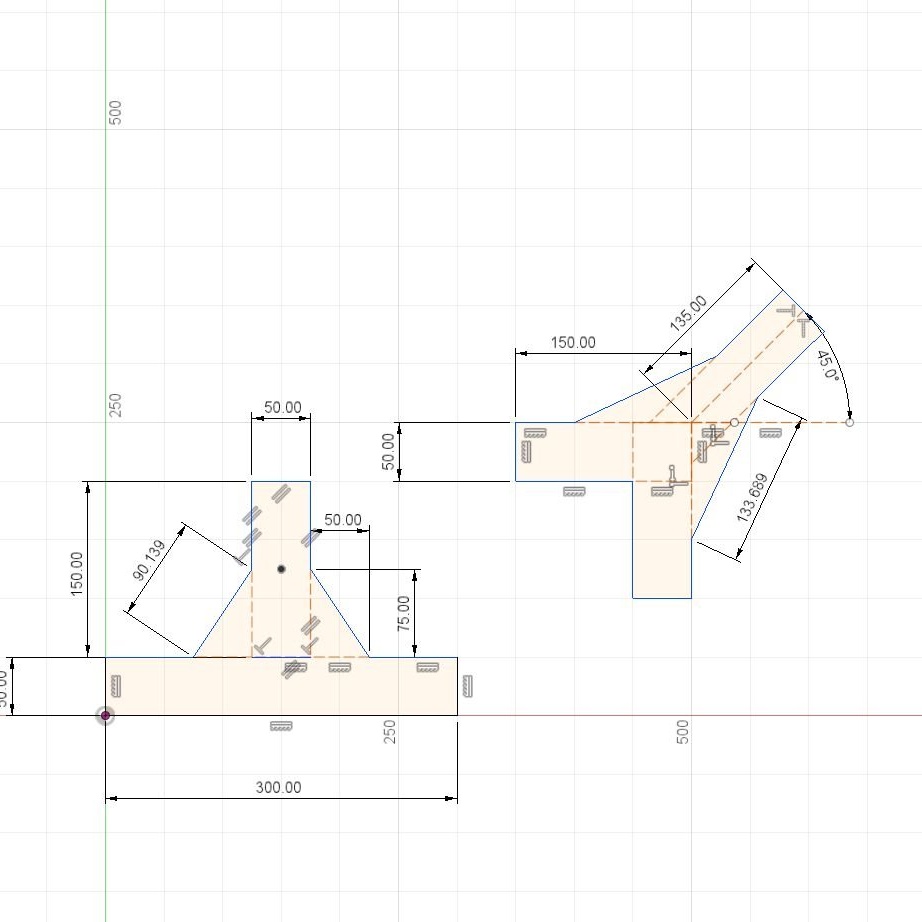
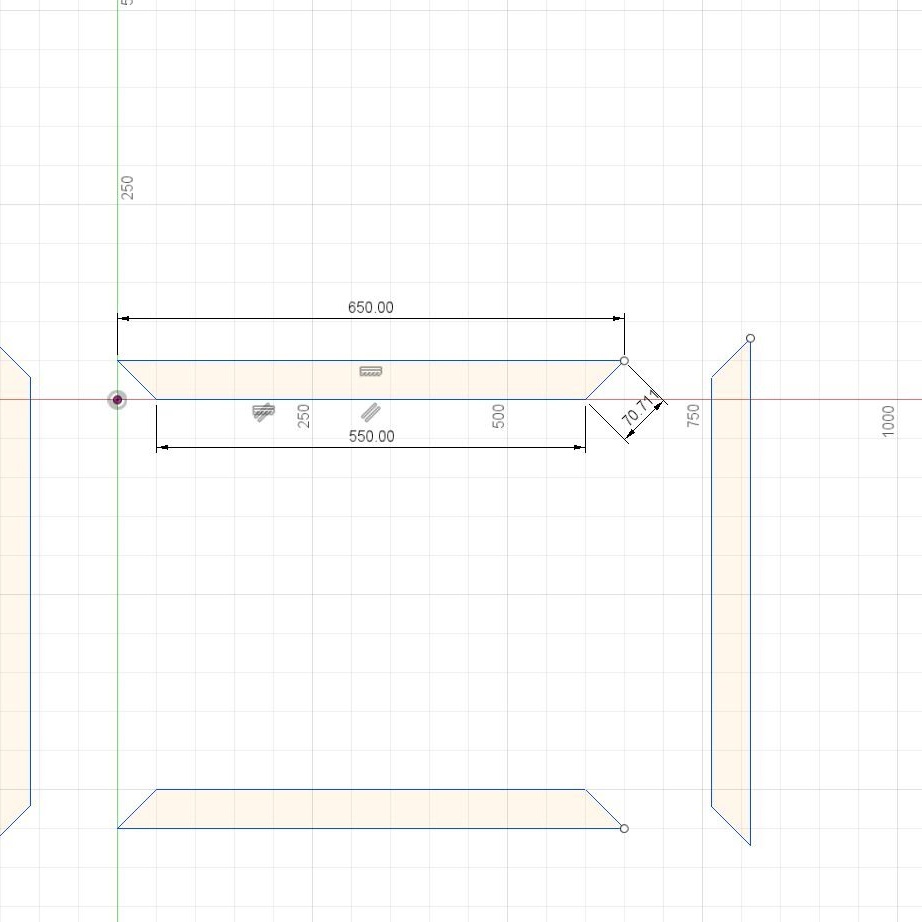
الخطوة الرابعة: الملف الشخصي للناقل
يتم تثبيت هذه الملفات الشخصية مع الأقواس ويتم تثبيت المحركات في نهاياتها. التشكيلات مربعة ، 50 × 50 سم ، ولها أطوال مختلفة. يتم ربط بروفايلات طولها 112.5 سم في الزوايا ، وهناك بروفيل 125 سم متصل بالجوانب ، ويتم عمل مقطع بزاوية 45 درجة. من الضروري أن يكون وجهه النهائي مجاورًا لمستوى الزاوية.
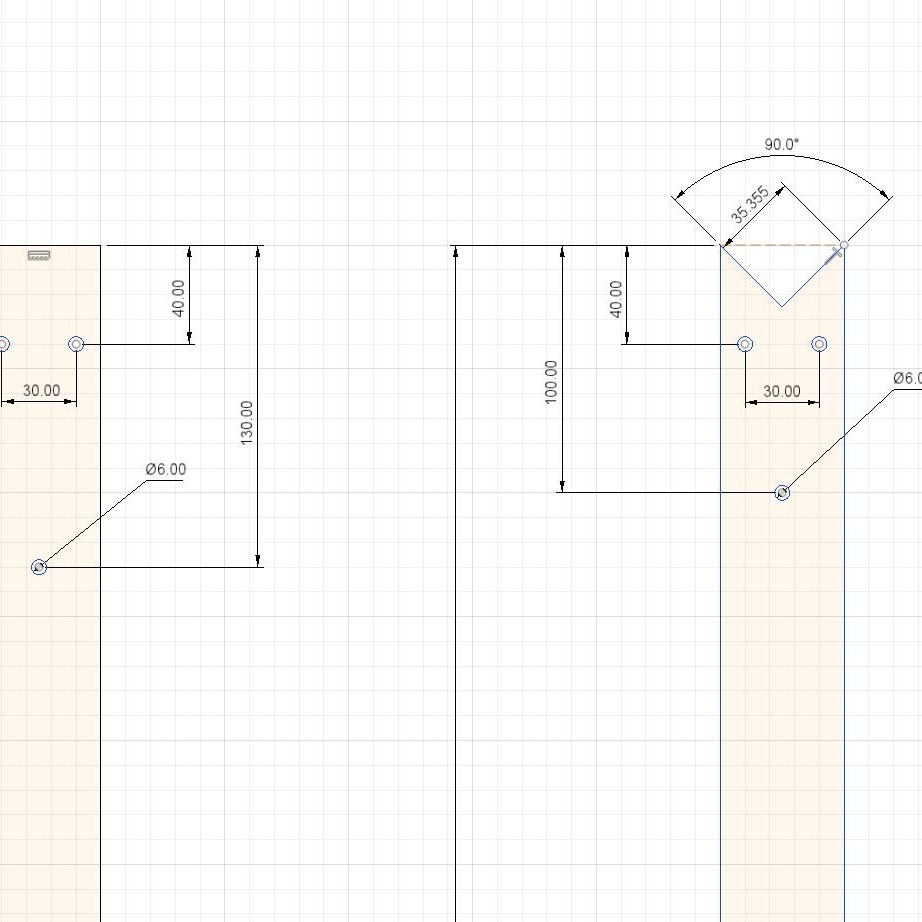
لتثبيت ملفات التعريف على الأقواس ، يقوم السيد بحفر ثقوب للمسامير.




الخطوة الخامسة: تركيب المحرك
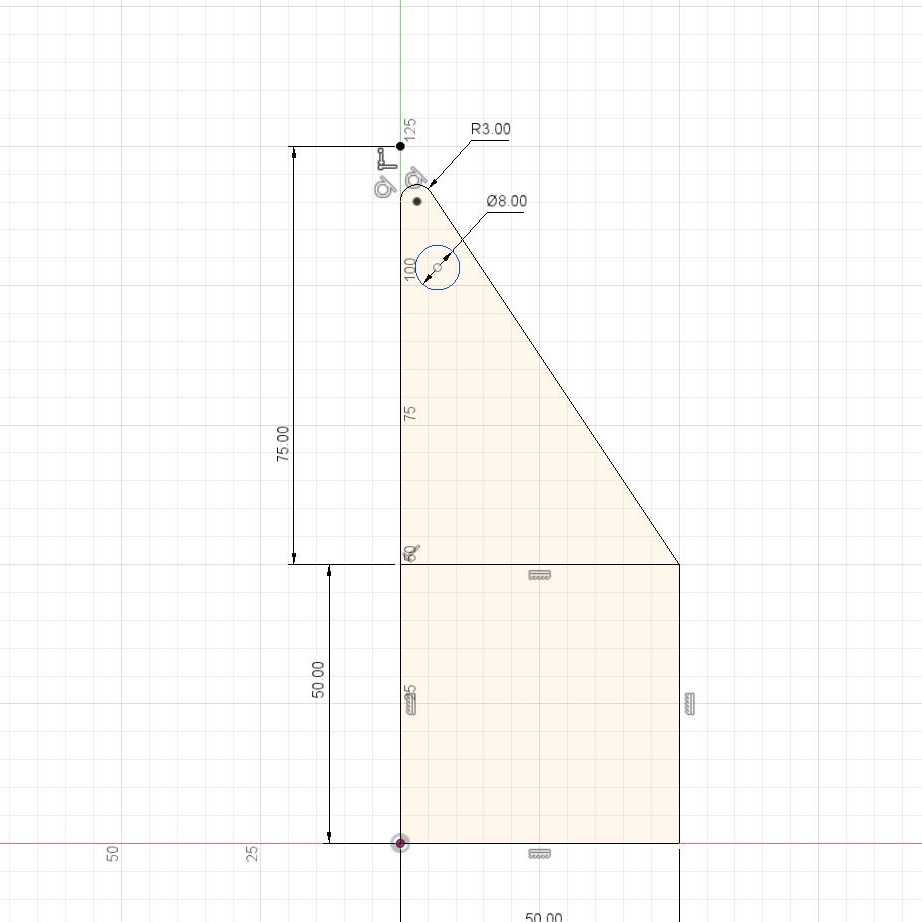
يتم ثني المحركات على صفيحة مربعة من الألومنيوم. من أسفل اللوحة ، بالتوازي مع بعضها البعض ، يتم ثني زوايا. المسافة بينهما تساوي عرض ملف التعريف. علاوة على ذلك ، يتم تثبيت اللوحة مع المحرك على الملف الشخصي ، ويتم حفر ثقوب التثبيت وكل شيء ملتوي بمسامير.





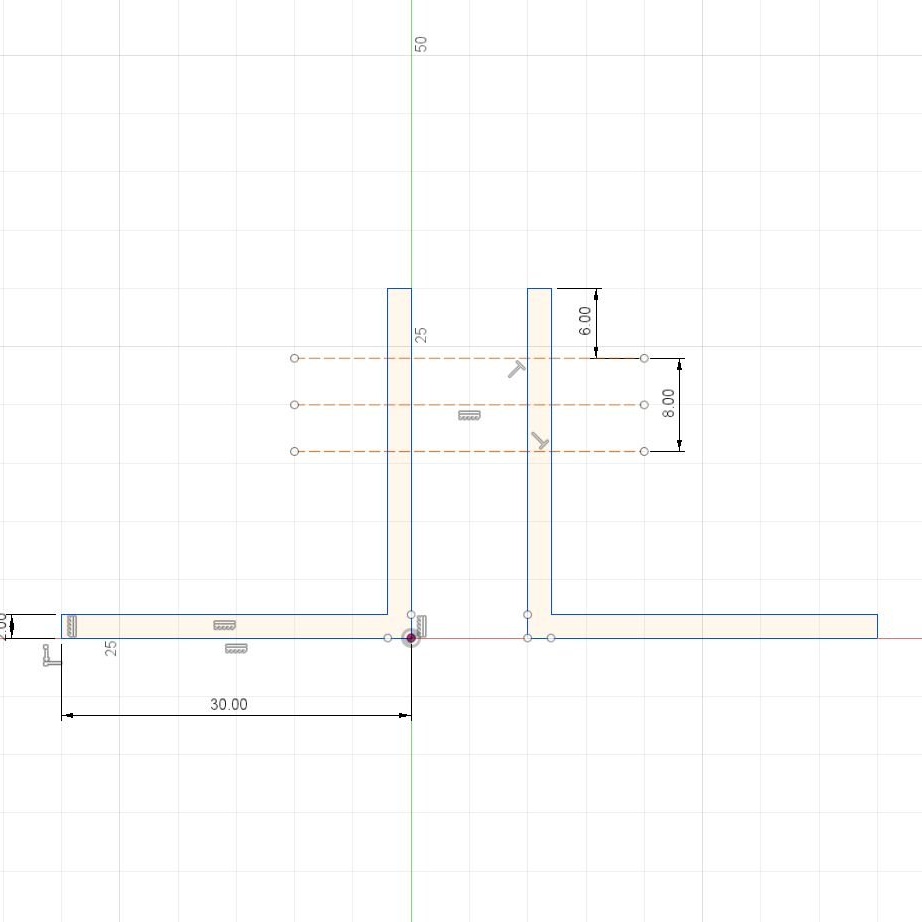
الخطوة السادسة: الهيكل
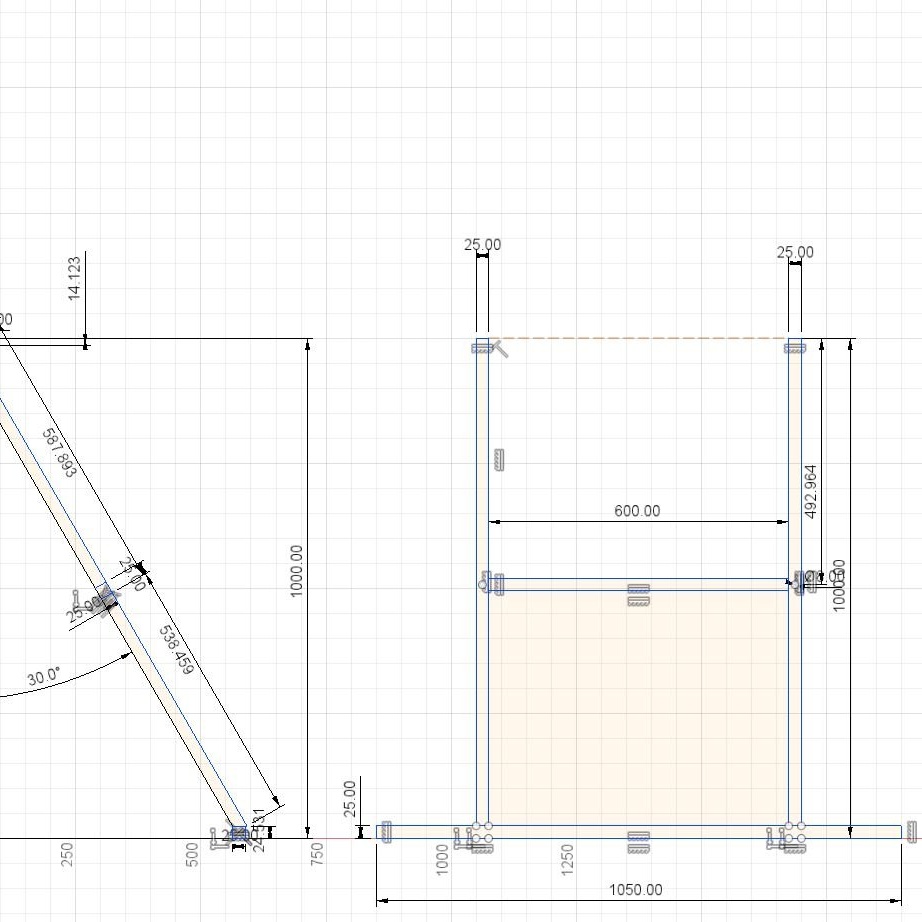
الشاسيه مصنوع من صفائح الألمنيوم 25 × 25 مم وسمك 3 مم. تم لحام جميع الأجزاء ، ويمكن رؤية أحجامها في الصورة. كانت الفكرة هي تركيب الهيكل خارج السلة بزاوية 30 درجة. لمنع تلف الهيكل المعدني ، يتم سحب كبلات الدعم بينهما.


الخطوة السابعة: دعم ملفات الدعم
بعد تثبيت المحركات ، بدأت ملفات التعريف الداعمة بالانحناء. ثم حاول السيد بدء تشغيل المحرك ، واكتشف أن ملفات التعريف "المشي". كان من الضروري تعزيز التصميم.
ستضيف إضافة اللوحات الكثير من الوزن إلى الهيكل. ثم قرر السيد عمل تصميم على شكل حرف V من السلة إلى الأسفل. وترتبط الحبال في الجزء السفلي. يتم توصيل الأطراف الأخرى للكابلات بأقواس في منتصف ملفات التعريف الداعمة. يتم سحب الكابلات برافعة. وبالتالي ، يصبح الهيكل صلبًا.















الخطوة الثامنة: الاتصال
أولاً ، يبيع السيد الموصلات لنهايات الأسلاك.


ثم يبدأ التثبيت. يجب فحص كل محرك لمعرفة اتجاه الدوران. إذا لزم الأمر ، فمن السهل تغيير اتجاه دوران المحرك ، وبالتالي ، المسمار ، مبادلة اثنين من الأسلاك الثلاثة القادمة من ESC إلى المحرك. بعد توصيل جميع المحركات بشكل صحيح ، قام المعالج بالتثبيت وفقًا لمخطط الاتصال من الشركة المصنعة.
أجهزة التحكم في الطيران IMU DJI A3 حساسة للغاية للتداخل من المعادن ، وكان المعلم غير قادر على تكوين النظام بسبب التداخل. ونتيجة لذلك ، استبدل السيد A3 بـ Naza M V2 ، الذي كان له مخطط اتصال مماثل. عمل Naza M V2 بشكل موثوق للغاية.
ثم يقوم المعالج بتوصيل البطاريات. في كل ملف تعريف للحامل ، يتم توصيل بطاريتين 22.2 فولت في سلسلة.



الخطوة التاسعة: المقعد التجريبي
المقعد مخيط من قماش متين. أيضا ، يتم إرفاق حزام أمان للطيار ، الذي يتم إرفاقه بالإطار ، وخوذة.






الخطوة العاشرة: الرحلة الأولى
قبل رحلة الطيار على طائرة من طراز octocopter ، تم إجراء العديد من الاختبارات باستخدام كيس من الرمل ، ثم باستخدام نموذج لشخص. خلال الرحلة ، تمت محاكاة مواقف مختلفة من فقدان السيطرة إلى عاصفة من الرياح.
بعد كل الاختبارات ، طار الطيار أخيرًا في الهواء.






قبل الطيران ، يجب عليك تنفيذ الإجراءات التالية.
تحقق من ضيق البراغي والكابلات وتركيب المحرك.
تحقق من الأسلاك.
تأكد من أن البراغي تدور بسهولة.
تأكد من إيقاف تشغيل كافة المجالس الاقتصادية والاجتماعية.
تأكد من توصيل جميع البطاريات وشحنها بإحكام.
قم بتوصيل الطاقة بوحدة التحكم في الطيران للتهيئة والمعايرة.
بعد الاتصال بـ GPS ، سيتم التبديل إلى الوضع التلقائي بالكامل (Alt. + Att. Hold).
اجلس في مقعد الطيار واربط حزام الأمان.
قم بتوصيل جميع البطاريات إلى ESC.
قم بتوصيل البطاريتين في سلسلة (ESC-RB-RB-ESC) باستخدام المقاوم للقضاء على الشرارة.
قم بتشغيل المحركات عن طريق تحويل المفتاح إلى وضع التشغيل.
استخدم وحدة التحكم للتحكم في octocopter.