
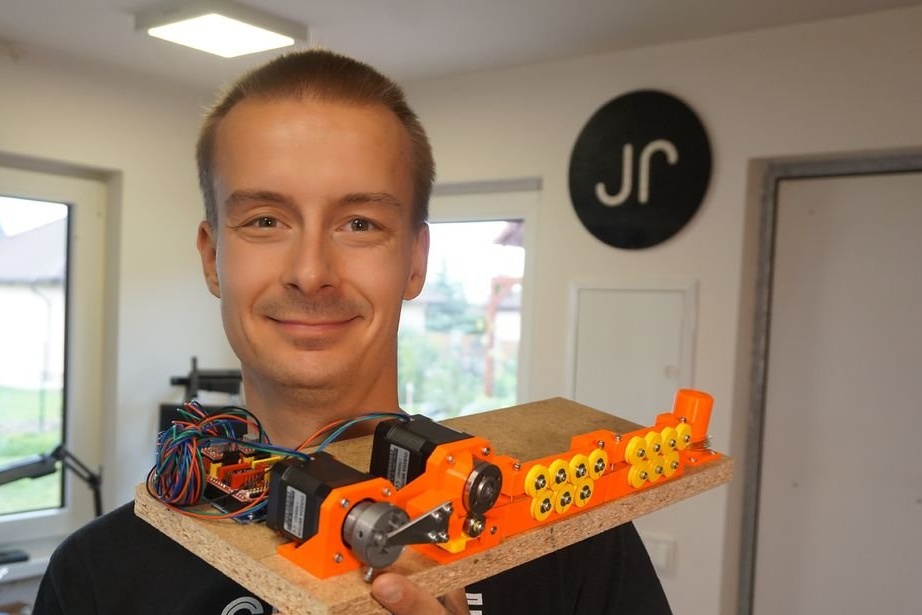
تم ابتكار وتصنيع جهاز مثير للاهتمام من قبل السيد ، وهو جهاز لثني الأسلاك من أي شكل. صنع الينابيع هو أحد ميزاته. هذه الآلة قادرة على ثني سلك 0.8 / 0.9 / 1 مم في أي شكل ثنائي الأبعاد.
كان الهدف الرئيسي من تصنيع هذه الآلة هو أتمتة عملية الانحناء. آلات محلية الصنع أخرى ليست دقيقة للغاية ، ولها انحناءات نصف قطرها كبير إلى حد ما.
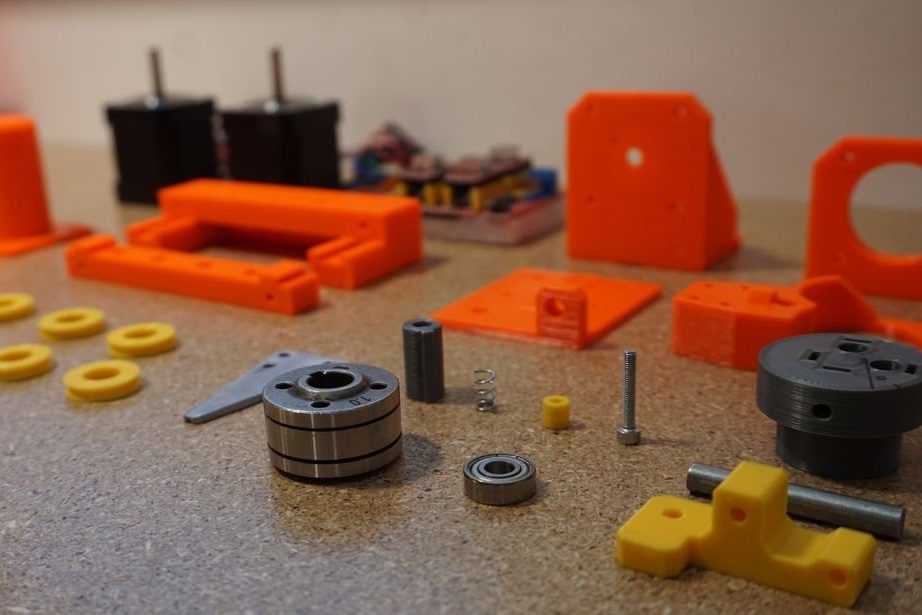
كانت المهمة الثانية هي جعلها بسيطة قدر الإمكان باستخدام الأجزاء والمكونات المتاحة بشكل شائع. تتم طباعة بعض أجزاء الجهاز على طابعة ثلاثية الأبعاد ، ويمكن شراء الأجزاء المعدنية من المتجر.
ما هو سيد مثل هذه الآلة؟ إنه مهتم بصنع أشكال LED ورقاقات الثلج والنجوم والزهور وما إلى ذلك. هناك حاجة إلى أجزاء متطابقة من الأسلاك في تصنيعها ، وهذا الجهاز سوف يسهل تصنيعها.
دعونا نشاهد فيديو قصير مع مثال للجهاز.
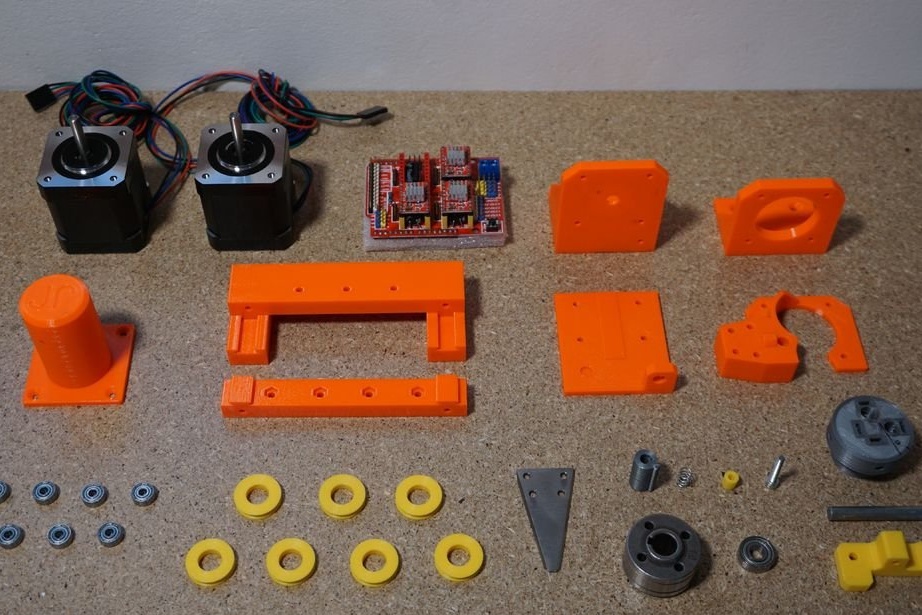
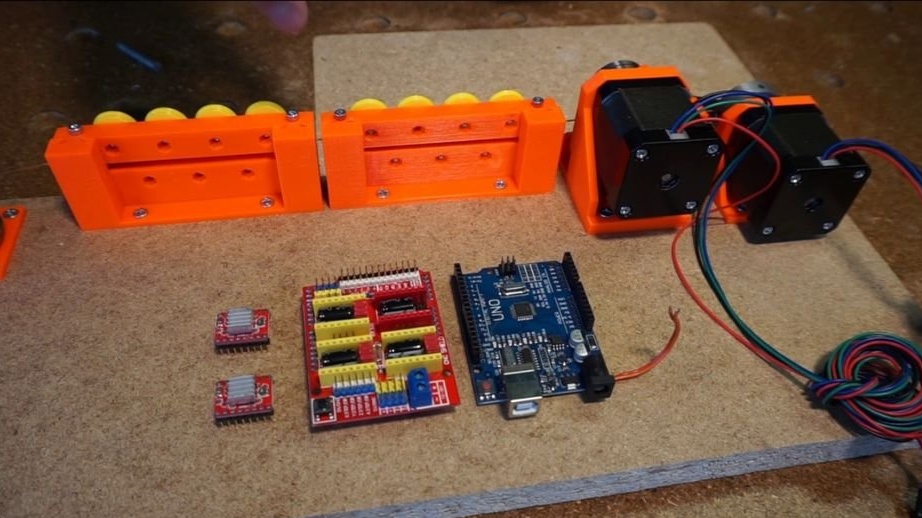
لذلك ، لتصنيع هذه الآلة ، استخدم السيد ما يلي
الأدوات والمواد:
-3D تفاصيل (يمكن تنزيل ملفات الطباعة هنا);
-الأصحاب.
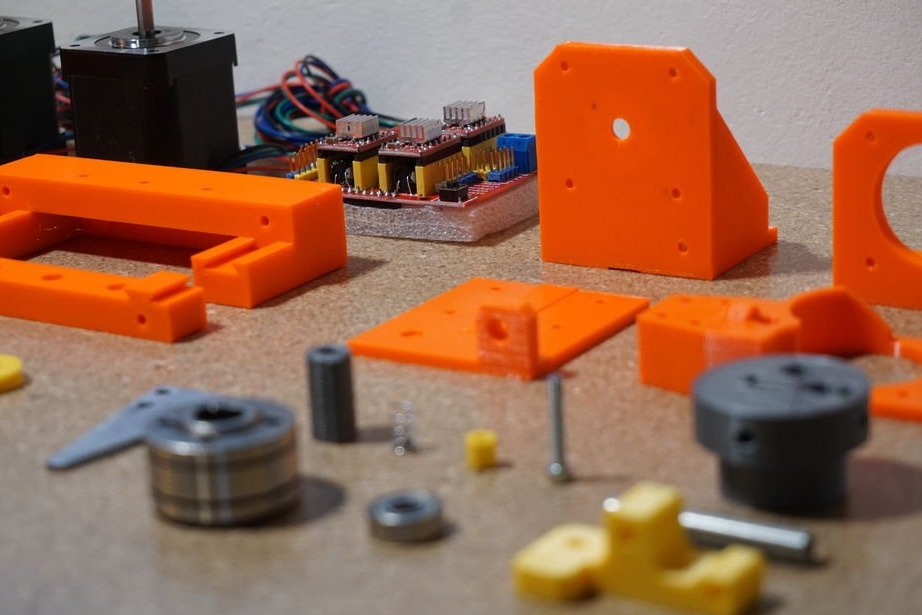
-اردوينو مكتب الأمم المتحدة ؛
- لوحة توسع لـ Arduino UNO ؛
-خطوة سائق A4988 -2 قطعة.
- محرك خطوة NEMA17 -2 جهاز كمبيوتر شخصى ؛
-12 فولت 3 أمبير إمدادات الطاقة.
- آلية تغذية الأسلاك ؛
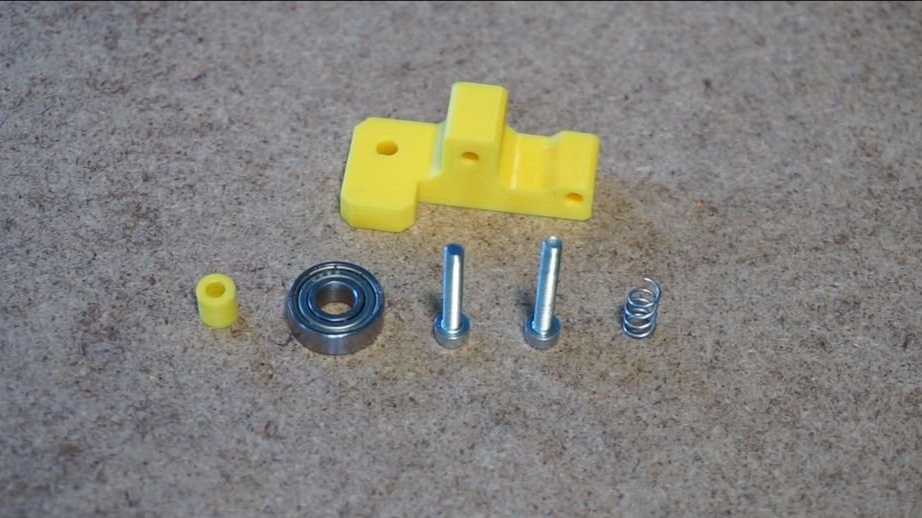
- ربيع فولاذي 4x6 مم ؛
- تحمل 3x10x4 مم ؛
- تحمل 6x15x4 مم ؛
-6 ملم قضبان الصلب.
- صفائح فولاذية بسماكة 2 مم ؛
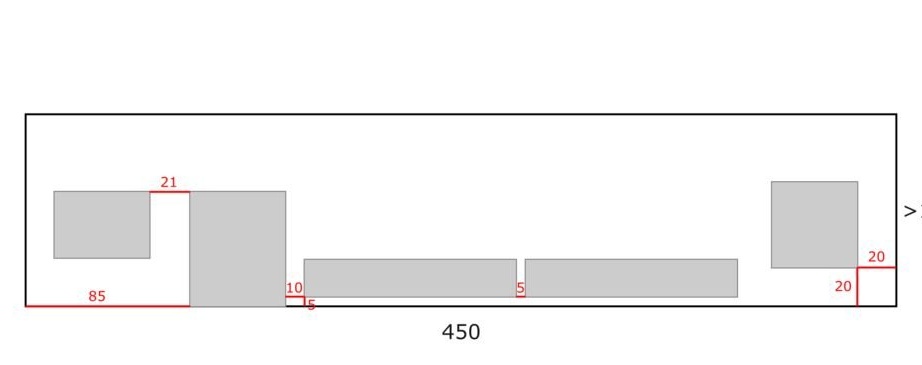
- لوح خشب للقاعدة 450 × 100 مم ؛
- مفك البراغي ؛
-Gon.
الخطوة الأولى: كيف يعمل
دعونا نلقي نظرة على كيفية عمل الآلة (من اليمين إلى اليسار).
حامل التخزين المؤقت - يحمل بكرة الأسلاك لمعالجة الجهاز.
المقوم - مجموعة من 7 بكرات بحيث يكون السلك متساويًا قدر الإمكان. العمل مع الأسلاك المستقيمة أمر بالغ الأهمية. هذا هو سبب مقومين.
طرح - يمكنك العثور على آلية مماثلة في طابعتك ثلاثية الأبعاد. تسحب مجموعة من التروس السلك من البكرة من خلال البكرات وتدفعه إلى رأس الانحناء. يجب أن تحتوي آلية التغذية على ضغط سلك كافٍ حتى لا تنزلق. المزيد عن هذا لاحقًا.
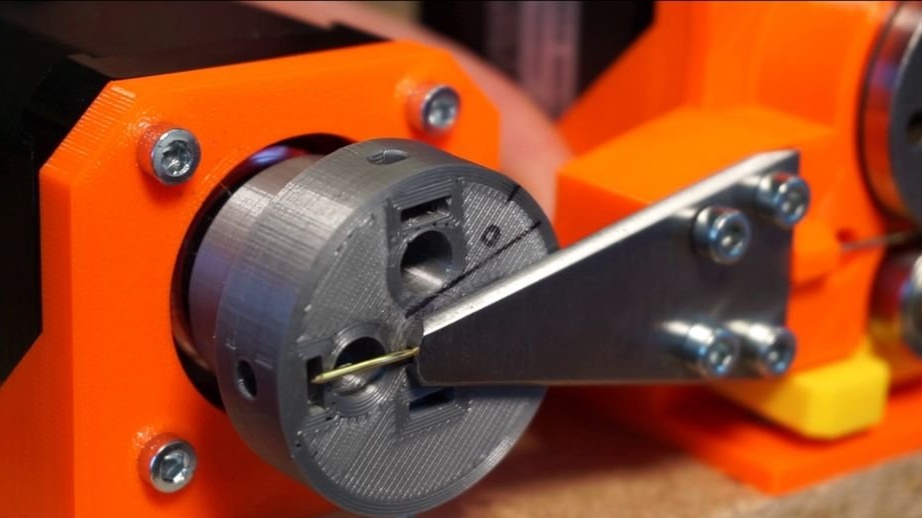
آلة الثني - تقوم بثني السلك في شكل مبرمج.
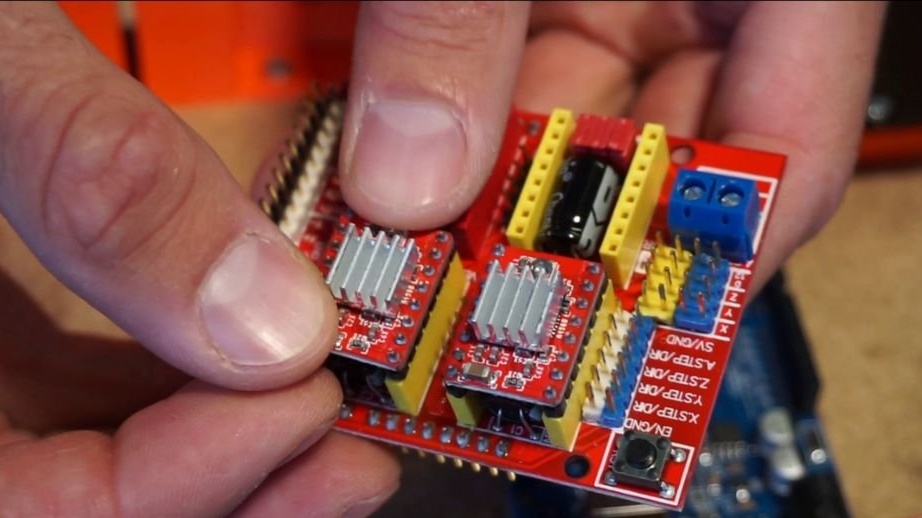
كل هذا يتم التحكم به بواسطة Arduino UN واحد مع درع CNC.يتم إرسال أمر إلى Arduino من الكمبيوتر وترجمتها إلى أوامر لمحركات السائر.

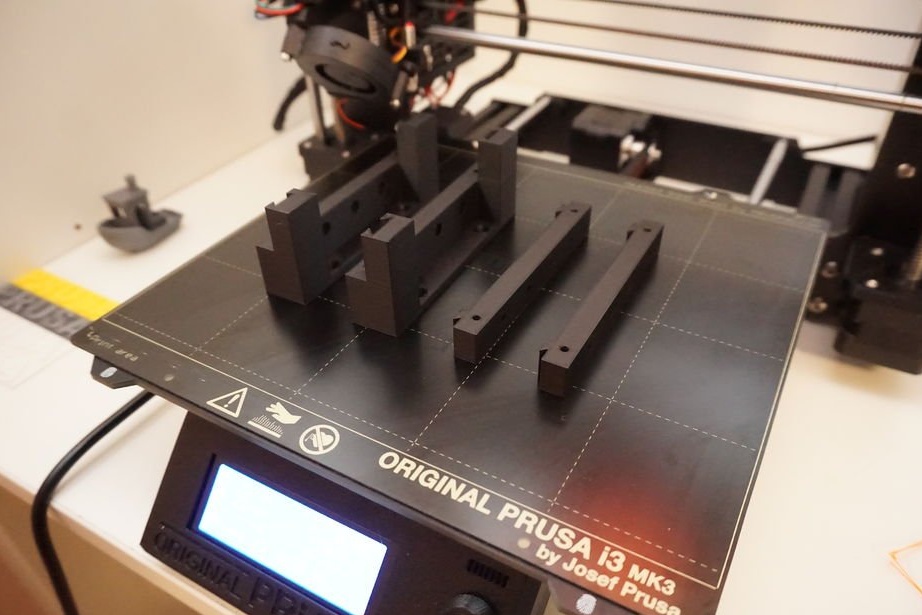
الخطوة الثانية: طباعة الأجزاء
تحتاج إلى طباعة التفاصيل التالية بالكميات التالية (لتجنب الخلط ، النص الأصلي):
بندر
رأس الأداة
إطار المحرك
Feeeder
إطار المحرك
إطار سفلي
دليل الأسلاك
النقل والعتاد العاطل
فاصل التروس المهمل
فاصل معدات التغذية
لوحة الانحناء (قالب)
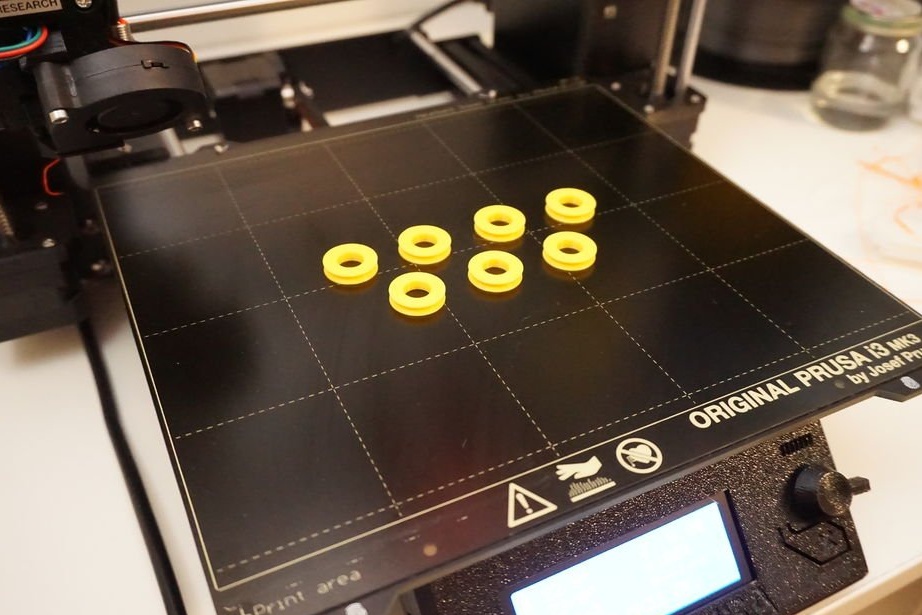
بكرات فرد (2x)
هيكل سرير (2x)
إطار التروس العلوي (2x)
الرول (14x)
حامل التخزين المؤقت
ارتفاع الطبقة عند الطباعة 0.15 مم. تعبئة 40٪. تستغرق الطباعة يومين.
الخطوة الثالثة: آلة الانحناء
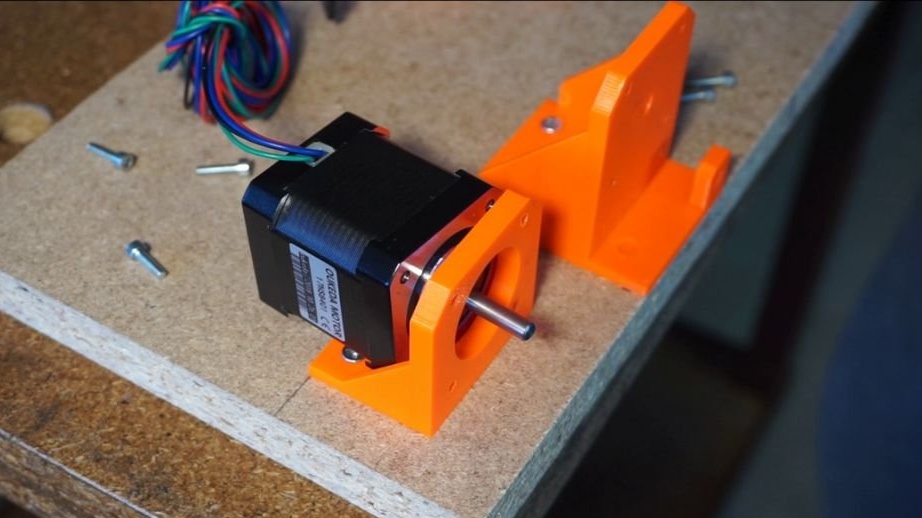
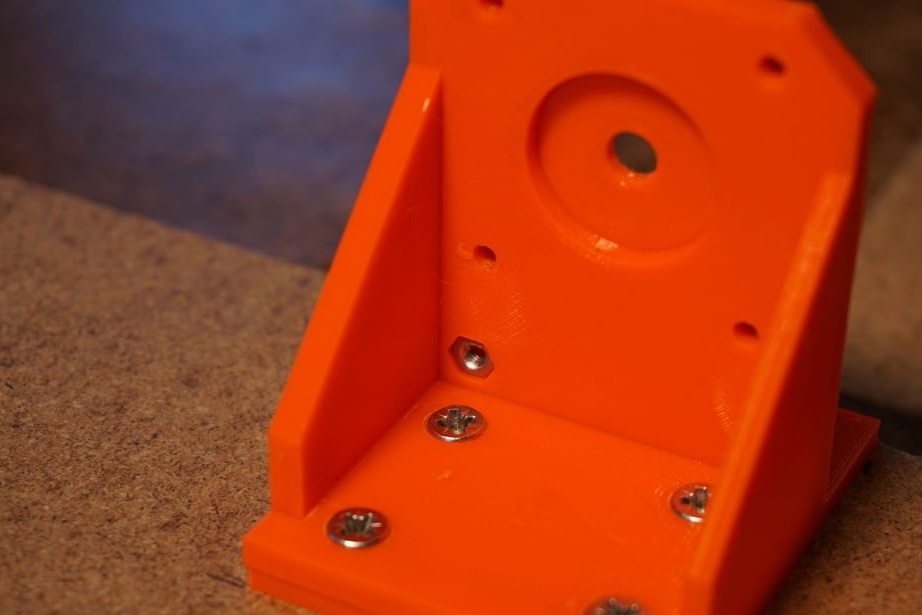
يقوم البرغي الرئيسي بتثبيت إطارين في القاعدة. من المهم تثبيت كلا الإطارين كما هو موضح في الرسم.
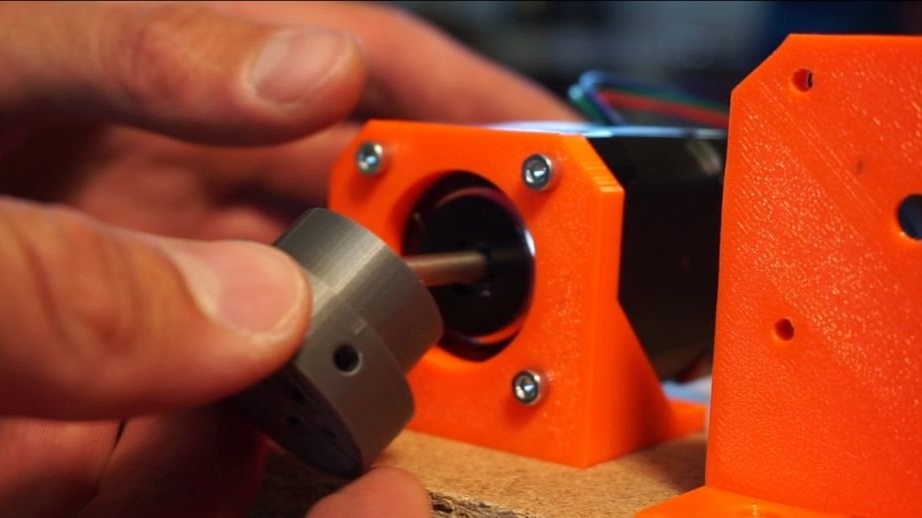
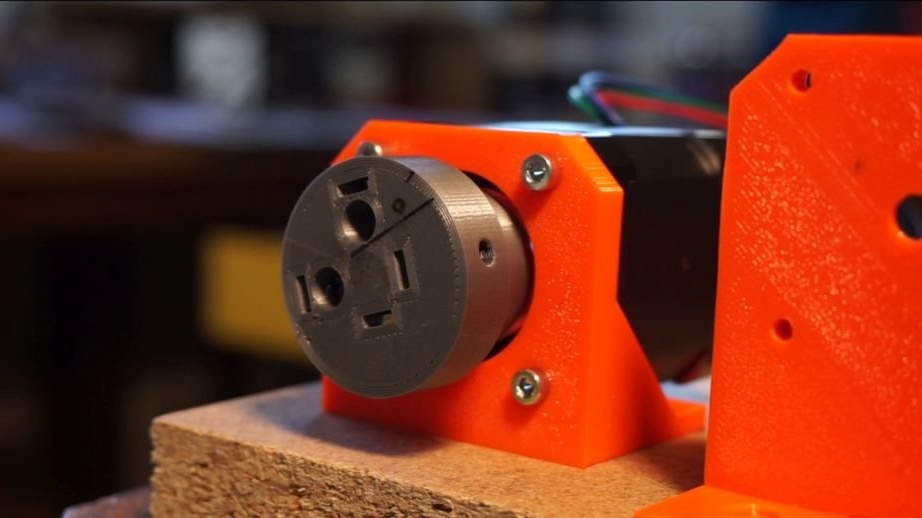
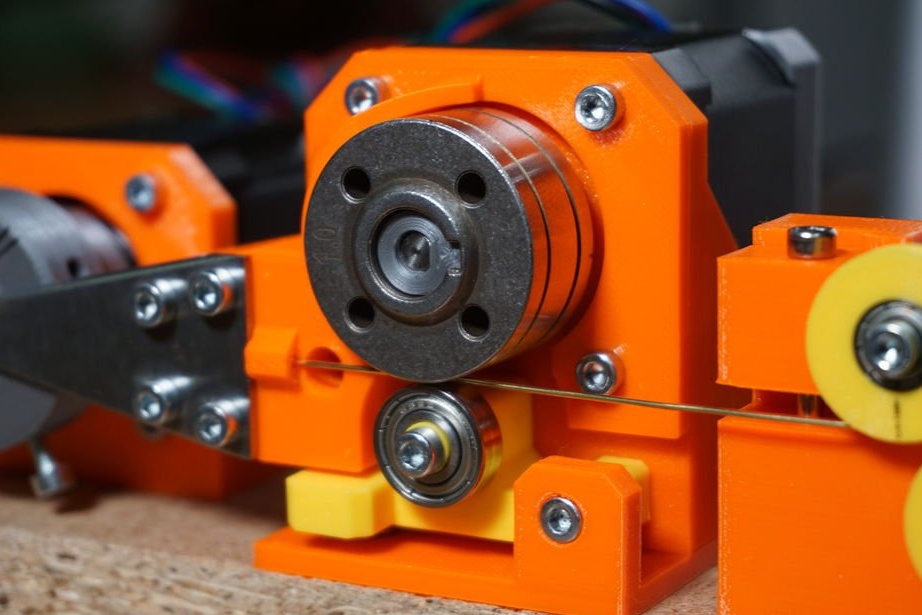
يؤمن محرك السائر على الإطار. يؤمن الرأس إلى عمود المحرك.


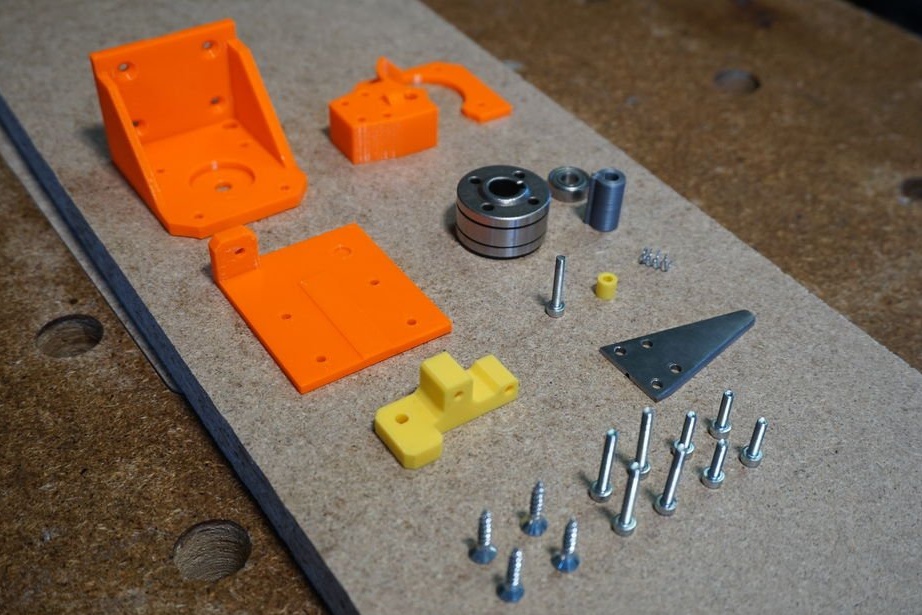
الخطوة الرابعة: طرح
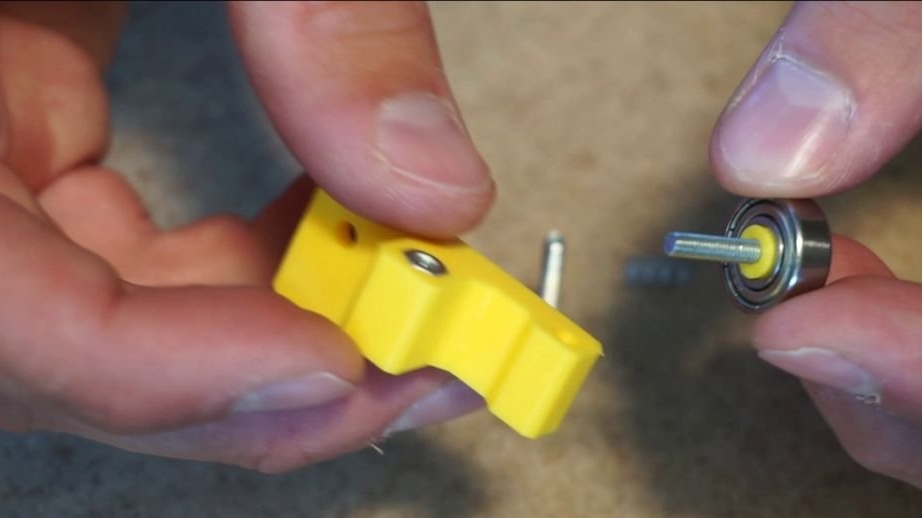
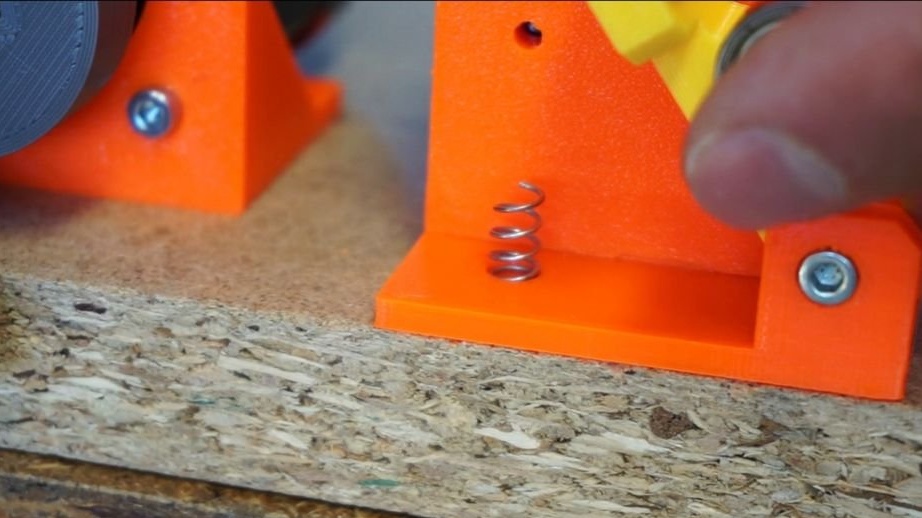
تم تثبيت الإطار بالفعل ، لذا فإن الخطوة الأولى في إنشاء آلية تغذية هي بناء عربة للتروس المتوسطة ، والتي ستضغط على السلك إلى آلية التغذية. قم بإزالة الحشية البلاستيكية داخل المحمل 6 × 15 × 4 مم. قم بتثبيت المحمل على الترباس M3x20. قم بتثبيت صمولة M3 في حامل الخيط وثبِّت المحمل على المزلاج. تأكد من أن المحمل يدور بحرية. أدخل صامولة M3 الثانية في إطار المحرك (جانب المحرك في الزاوية اليسرى السفلية) وقم بربط حامل الخراطيش عبر الحامل الصغير باستخدام مسمار التثبيت M3x20. لا تفرط في ربط البرغي ؛ يجب أن يتحرك حامل الخراطيش بحرية. ارفع حامل الخراطيش وأدخل الزنبرك في الفتحة الموجودة تحته.
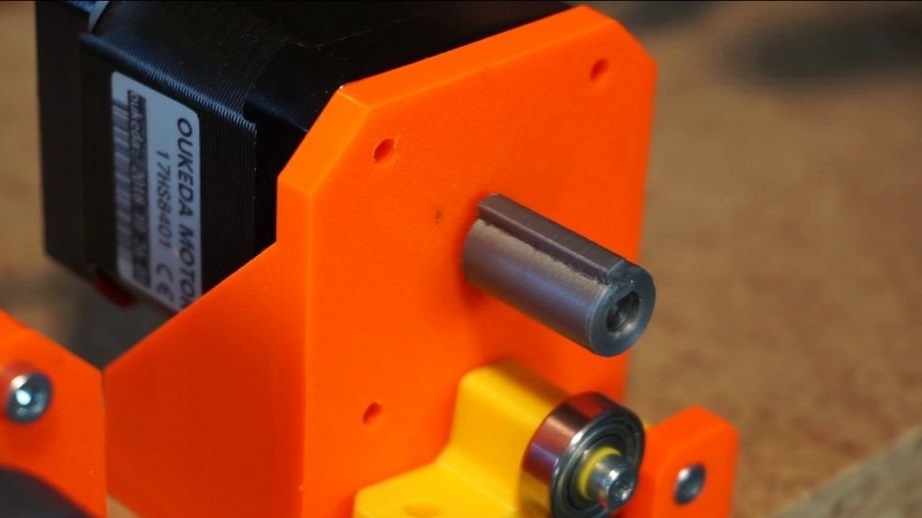
خذ محرك السائر الثاني وقم بتثبيته في إطار المحرك. لا المسمار حتى الان. اضغط على فاصل آلية التغذية إلى عمود المحرك وقم بتثبيت آلية التغذية.
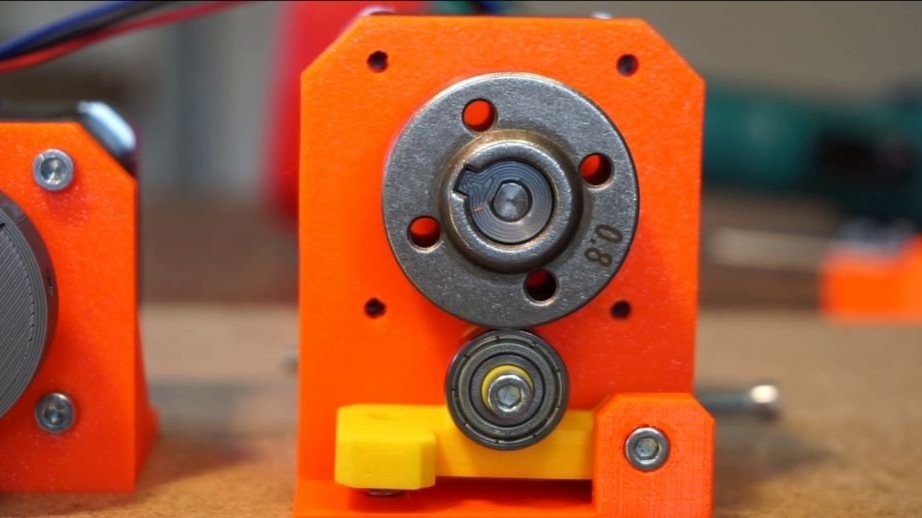
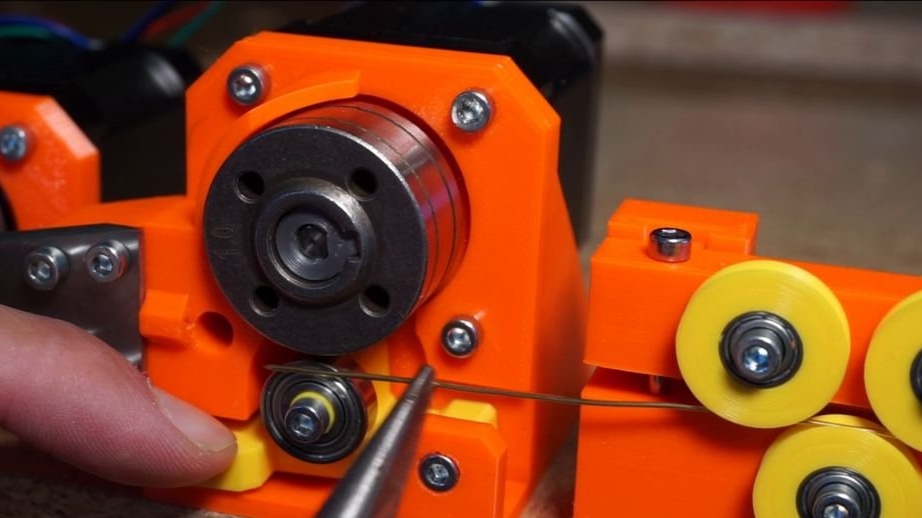
يتم أخذ آلية التغذية التي يستخدمها المعلم من آلة لحام MIG. الآلية لديها استراحة على الملف. واحد بسلك 0.8 مم وواحد بسلك 1 مم. على عكس التروس (حاول السيد في السابق إطعام الأسلاك معهم) ، فإن هذه الآلية لا تترك علامات على السلك.
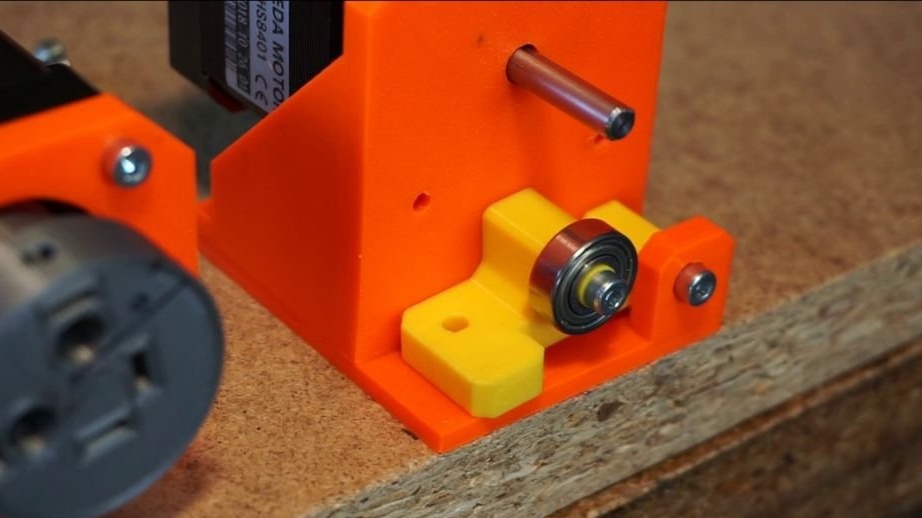
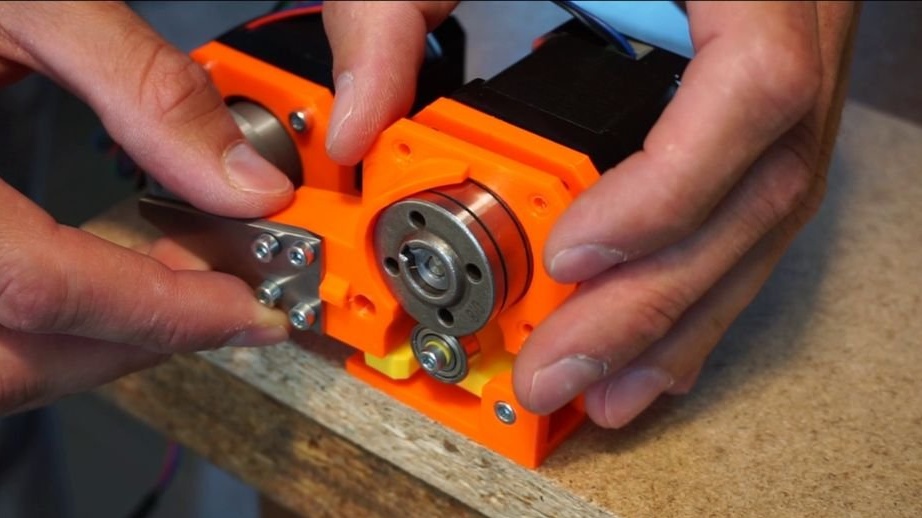
يتم توصيل جهاز التغذية وجهاز الانحناء عن طريق لوحة الانحناء - لوحة معدنية بسماكة 2 مم مع أخدود صغير على الجدار الخلفي ، والذي يغذي السلك مباشرة إلى مركز رأس الانحناء للحصول على الانحناء المثالي. للطباعة ، هناك لوح ثني بلاستيكي يعمل بشكل رائع ، ولكنه يتآكل بسرعة ويتطلب استبداله بشكل متكرر. يمكنك استخدامه ، أو يمكنك عمل لوحة معدنية عليه.
بعد ذلك ، خذ الجزء البلاستيكي من دليل الأسلاك وقم بتثبيت الصواميل الأربعة M3 في الفتحات الموجودة على الجانب الخلفي. الآن قم بتثبيت لوحة الانحناء بمسامير M3x20. ضع دليل الأسلاك أمام إطار المحرك لآلية التغذية وثبته في المحرك باستخدام أربعة مسامير M3x12. اضبط موضع لوحة الانحناء. يجب أن يكون بالضبط في منتصف رأس الانحناء.
البروش جاهز. إذا كان لديك سلك مستقيم ، يمكنك استخدام السلك الآن. خلاف ذلك ، تحتاج إلى مقوم.





الخطوة الخامسة: طرح
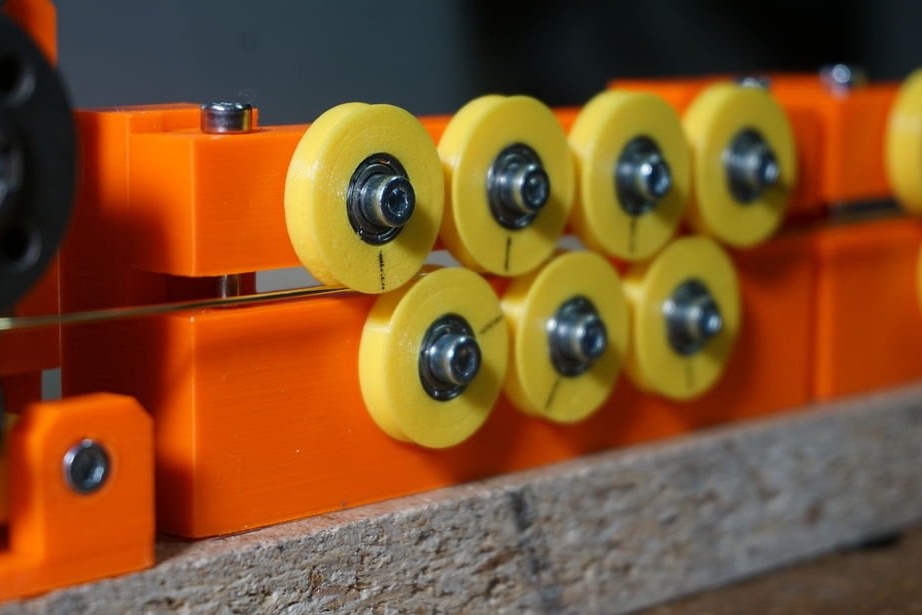
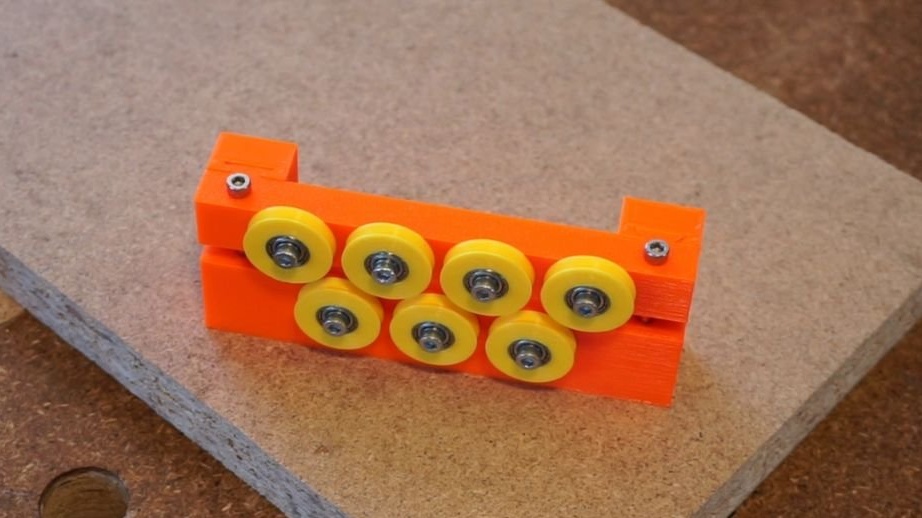
عادة ما يتم توفير السلك في شكل ملف. لثني السلك ، تحتاج أولاً إلى تصويبه. يتكون المقوم من 7 بكرات (4 في الأعلى و 3 في الأسفل) ، والتي يمكن الضغط عليها ضد بعضها البعض لضمان الشد الصحيح للسلك. كما أنه يمنع التواء السلك أثناء الانحناء.
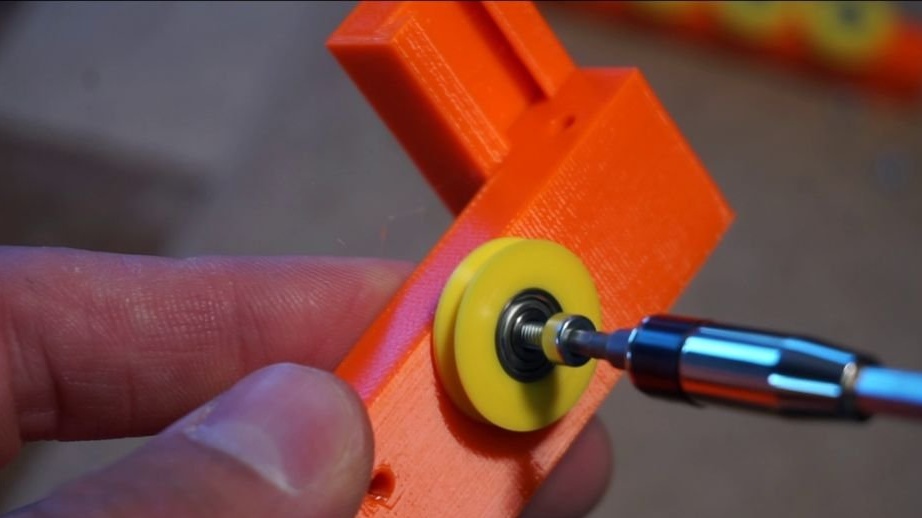
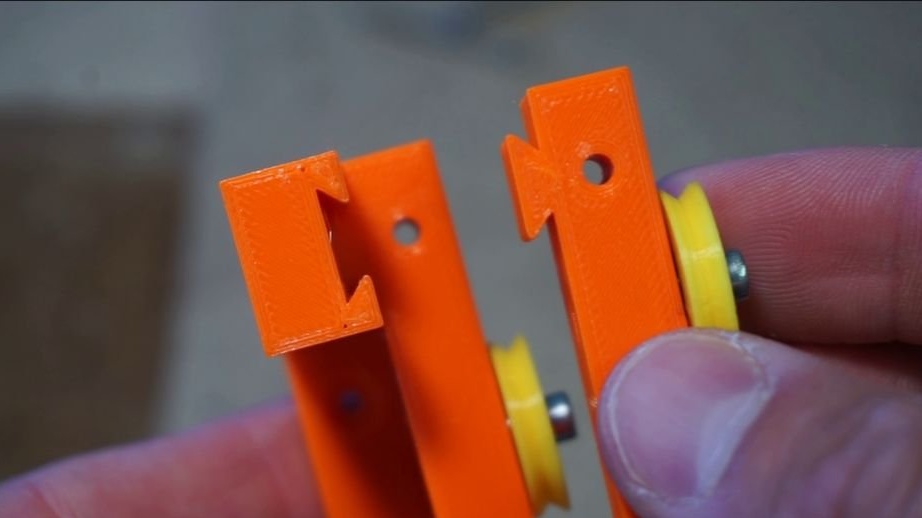
ابدأ التجميع بالعجلات الدوارة. تحتاج أولاً إلى الضغط على المحمل 3x10x4 مم في مبيت الأسطوانة البلاستيكية. أدخل مسمار التثبيت M3x12 على جانب واحد وغسالة M3 على الجانب الآخر من الأسطوانة. ستمنع الغسالة احتكاك العجلة على الإطار. قم بلف جميع البكرات إلى الإطار السفلي والعلوي. قم بتوصيل كلا الإطارات. قم بتأمين الإطارات باستخدام برغيين M3x40.
يمكنك توفير بعض المال على محامل الأسطوانة. طباعة الجزء Straightener_RollerNoBearing بدلاً من Straightener_Roller. لكن الأداء سيكون أسوأ قليلاً.
للحصول على نتائج أفضل ، استخدمي مكواة فرد الشعر على التوالي.




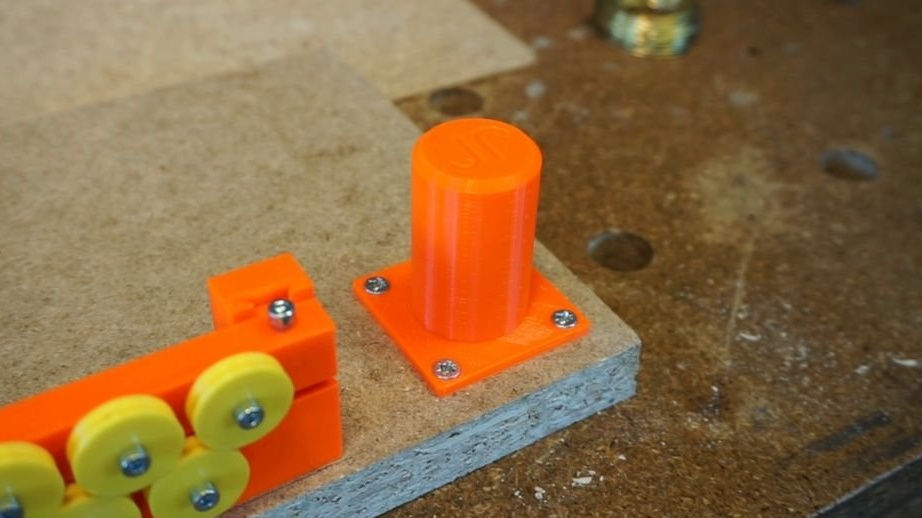
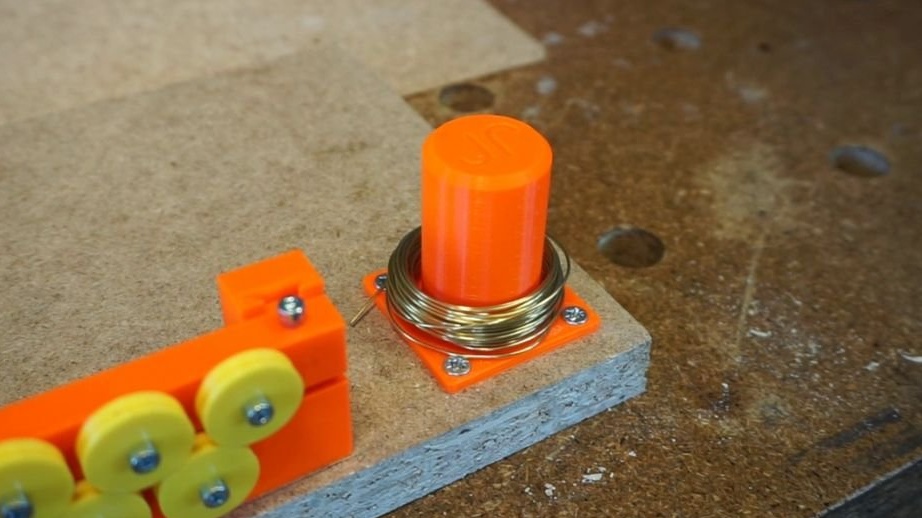
الخطوة السادسة: حامل الملف
حامل البكرة عبارة عن أسطوانة بسيطة تحمل السلك وتسمح له بالاسترخاء من البكرة. قم بتثبيته على القاعدة بأربعة مسامير 3x16.
الخطوة السابعة: الاتصال
أولاً ، يجب تغذية سلك الانحناء إلى الجهاز. يستخدم السيد الأسلاك النحاسية 0.8-1 مم على شكل لفائف.
ينتقل السلك من الملف عبر البكرات. ما عليك سوى لصق السلك بين البكرات. ثم تذهب من خلال الطرح.اضبط موضع آلية التغذية بحيث يتم تنظيف الميزاب بسطح دليل الأسلاك. اضغط على الذراع في الترس المتوسط وادفع السلك عبر وحدة التغذية إلى لوحة الانحناء. حرر الذراع واتركه يضغط على آلية التغذية. يمكنك الآن تمرير آلية التغذية يدويًا لدفع السلك إلى رأس الانحناء. اضبط الشد على البكرات بعناية عن طريق شد البراغي. يجب ألا تدور البكرات بحرية ، ولكن يجب أن يتحرك السلك بسلاسة.
ثانيًا الإلكترونيات يجب أيضًا توصيل وحدة التحكم. يستخدم السيد Arduino UNO الكلاسيكي مع CNC واثنين من سائقي محركات السائر A4988. يتم توصيل محرك التغذية بالمحور Z ، ومحرك رأس الانحناء بالمحور X. وقد تم تكوين برامج التشغيل للحصول على أعلى دقة ممكنة - يتم إدخال جميع وصلات العبور الثلاثة تحت محركات الدرجات. يجب توصيل كل شيء بمصدر طاقة 12 فولت 3 أمبير.

الخطوة الثامنة: البرامج الثابتة
الآن يمكنك محاولة بدء تشغيل الجهاز. يستخدم سيد GRBL مع cncjs. وهي مصممة للعمل على آلة الطحن ، ولكنها تعمل بشكل رائع لأي نوع من أنواع CNC. GRBL هو البرنامج الثابت الذي تحتاج إلى تثبيته في Arduino UNO. هناك عميل ويب cncjs جيد لتحديد المعلمات. قم بتثبيت GRBL على Arduino و cncjs على جهاز الكمبيوتر الخاص بك.
بعد التثبيت ، تحتاج إلى الاتصال بالجهاز والتحقق من تشغيله بالضغط على الأزرار Z +/- أو X +/-.
الآن أنت بحاجة إلى معايرة: 10 مم = Z10 دولار 102 = 34 دولار 110 = 1600 دولار 111 = 600 دولار 112 = 1000 دولار 120 = 500 دولار 121 = 350 دولار 122 = 350
هذه مجموعة من القيم التي تحدد كيفية تحويل الرقم المشار إليه في التعليمات البرمجية إلى حركة المحرك. على سبيل المثال ، إذا قمت بتعيين المحور Z على 30 ، فهذا يعني في الواقع أنه سيدفع 30 مم من الأسلاك عبر وحدة التغذية.
لقد توصلنا إلى المعايرة ، والآن تحتاج إلى ضبط رأس الانحناء على الوضع صفر.
يتم تحديد حركة رأس الانحناء من خلال الوضع الثابت المعروف لرأس الانحناء. في هذه الحالة ، هذا هو الموضع الذي يواجه فيه دبوس الانحناء على الرأس اليسار. انظر الصورة.
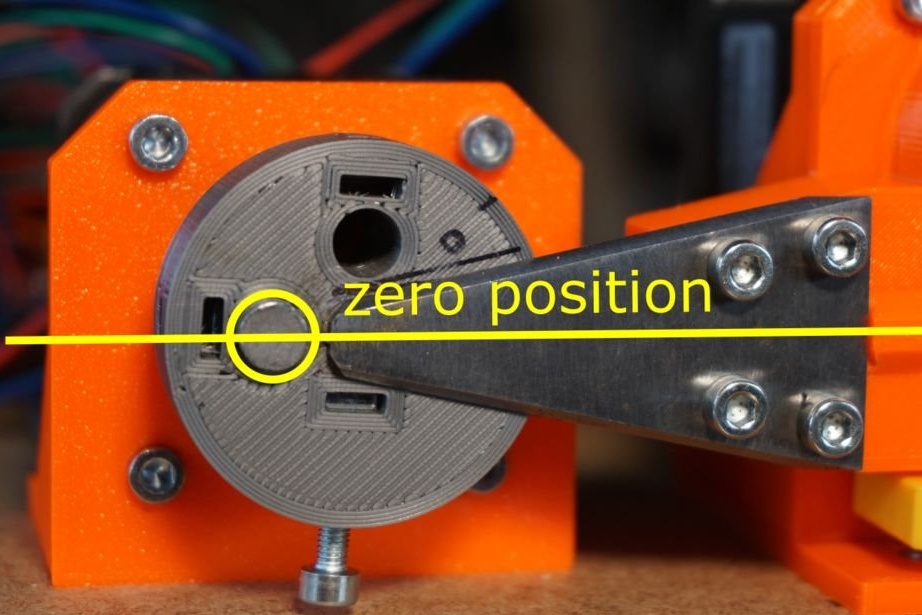
من المستحسن ملاحظة هذا الوضع الصفري على الرأس حتى تتمكن من إعادته إلى نفس الوضع. ليست هناك حاجة لآلية التغذية لتحديد موضع الصفر ، لأنه يتحرك دائمًا بالنسبة للموضع الحالي.
الآن دعونا نلقي نظرة على مثال Gcode. يبدو هذا:
G91
G1 Z1
G90
G1 X2
G1 X-6وإليكم ما تتم كتابة كل قيمة من أجله:
G91 - استخدام الإحداثيات النسبية (مطلوب قبل أي حركة على طول المحور Z)
G1 Z1 - تغذية سلك 1 مم
G90 - استخدام الإحداثيات المطلقة (مطلوب قبل أي حركة على المحور X)
G1 X2 - أدر رأس الانحناء إلى الوضع 2 (هذا الرقم لا يحتوي على وحدات)
G1 X-6 - أدر رأس الانحناء إلى الوضع -6
إذا كررت الخطوات 100 مرة ، فستحصل على رمز ثني الربيع. يمكن العثور على المزيد من ملفات المصدر أدناه.
hex-inner.gcode
hex-outer.gcode
spring.gcode
الآلة جاهزة. لكن السيد سيظل يعمل على تحسينه.
يمكن رؤية العملية الكاملة لتصنيع هذه الآلة في الفيديو.