


عشاق مساء الخير محلية الصنع! اليوم سنقوم بتجميع محدد المدى البسيط اردوينو برو ميني. الجهاز قادر على قياس المسافة من 2 الى 400 سم ويصل خطأ هذا الجهاز فقط +/- 1-5 سم حسب المسافة المقاسة.
الأدوات والمواد
-أردوينو برو ميني
مستشعر HC-04
- مؤشر tm1637
-سلك (لدي - MGTF 0.12)
- مبرمج
- إسكان بلاستيكي
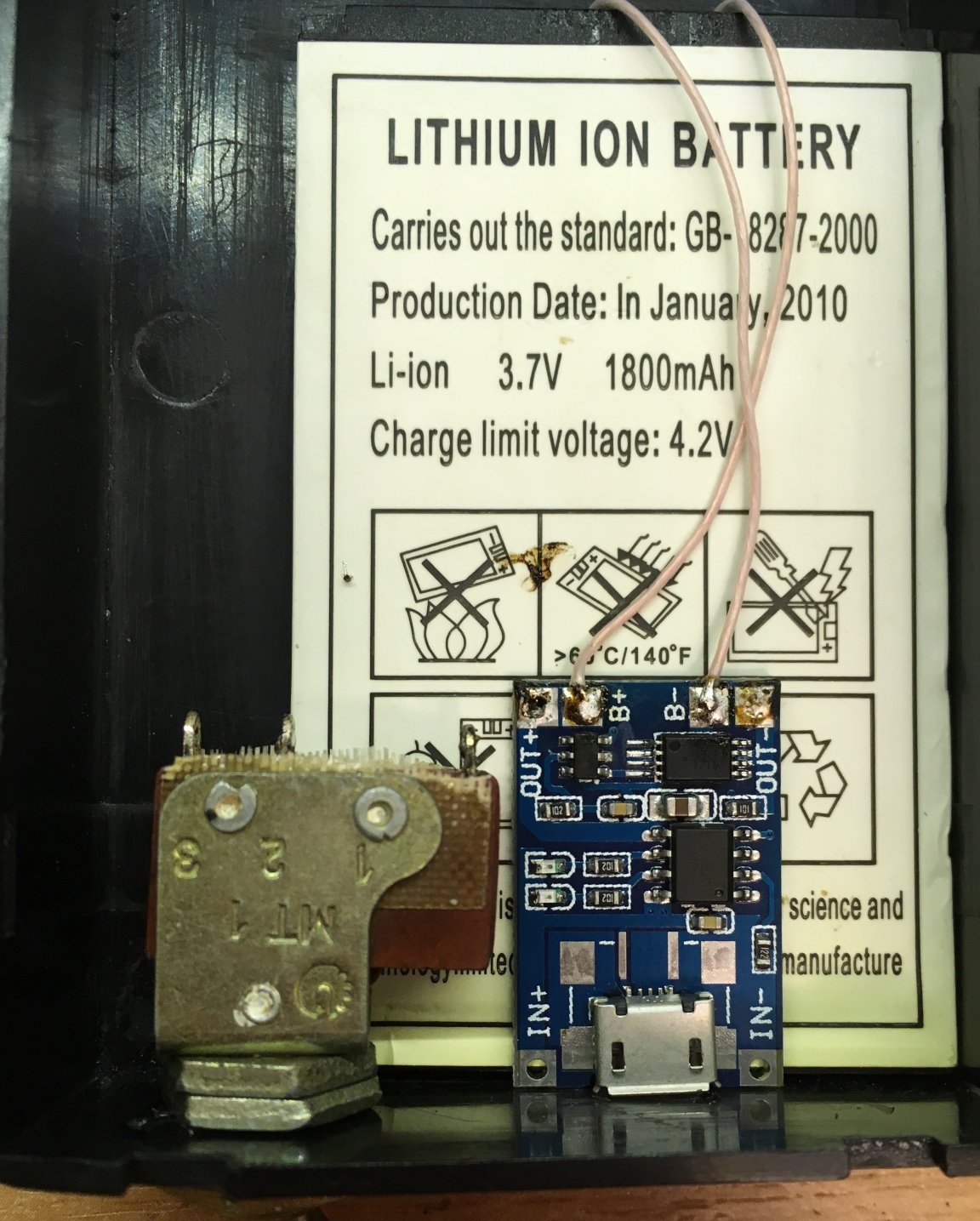
- بطارية ليثيوم
-مفتاح صغير
- لوحة شحن على TP4056
Superglue
- مكواة لحام
-حام
الصنوبري
الحفر ، الحفر ، إلخ.
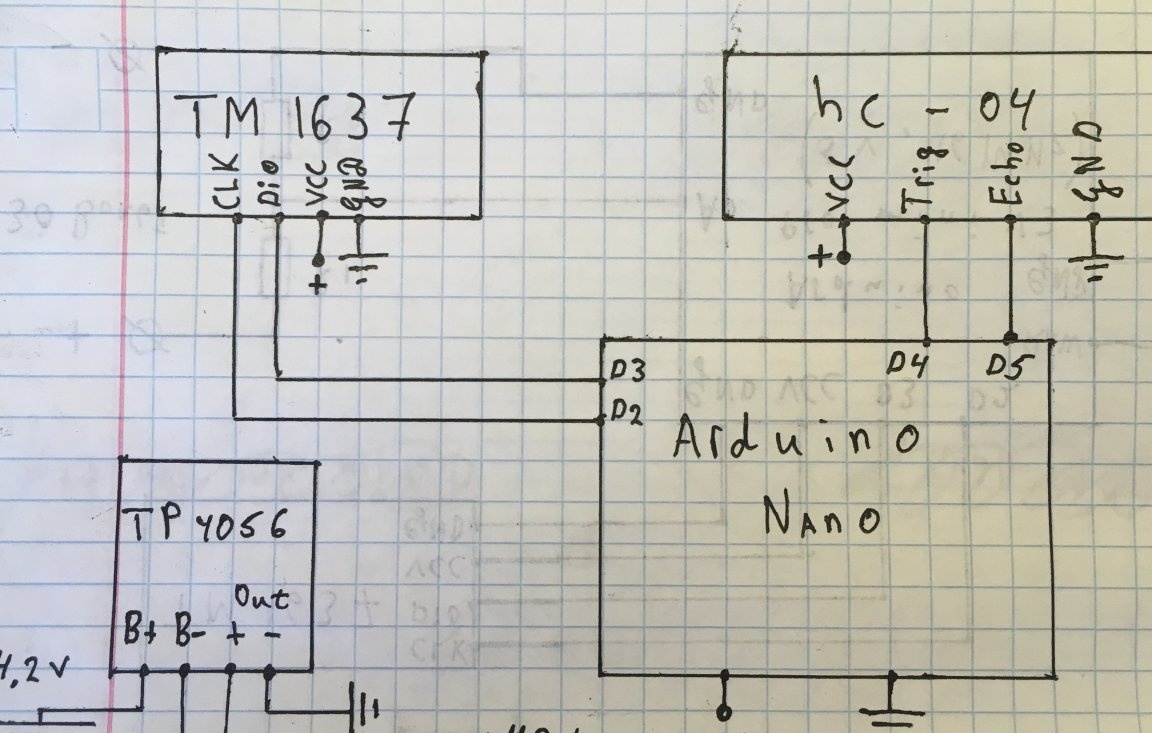
الخطوة الأولى. المخطط:
وفقًا للمخطط ، كل شيء بسيط بدون إضافات.
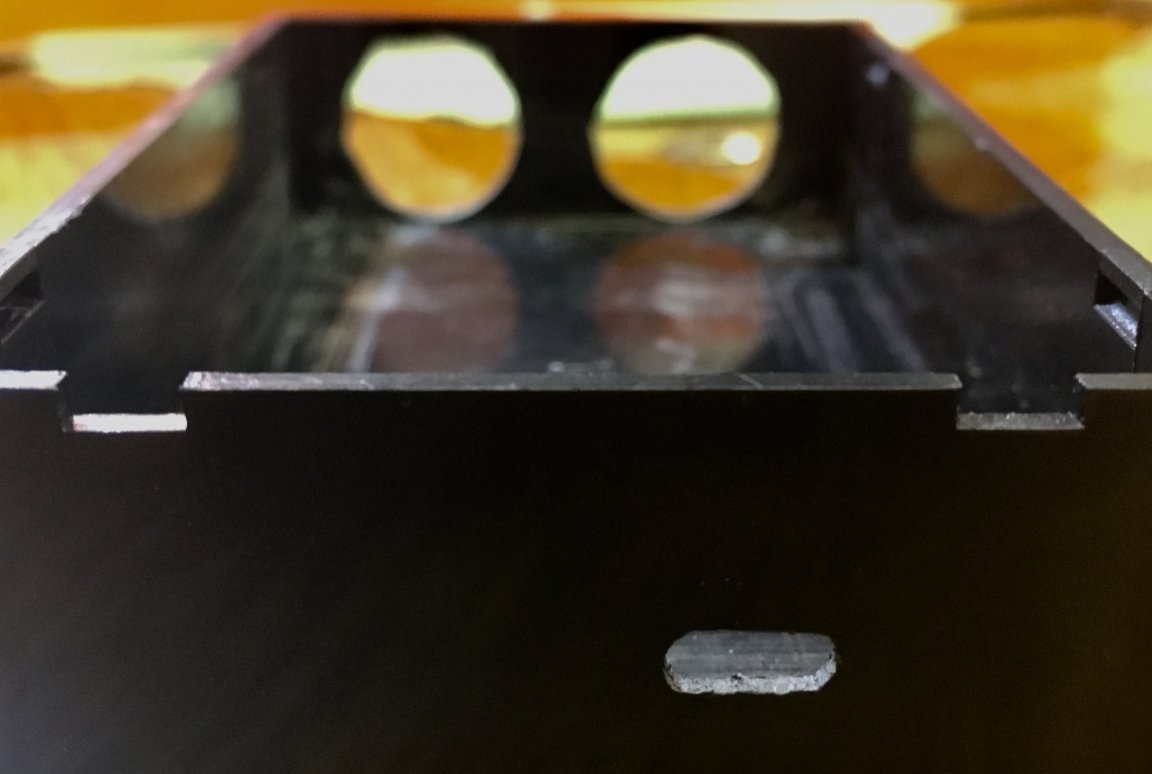
الخطوة الثانية: إعداد القضية:
أولاً نحاول على المستشعر ونحفر ثقبين لمدة 15 ملم.

بعد ذلك ، قم بعمل فتحة لموصل USB صغير مع مثقاب 3-3.5 ملم.
نختار المثقاب لقطر المفتاح والحفر.
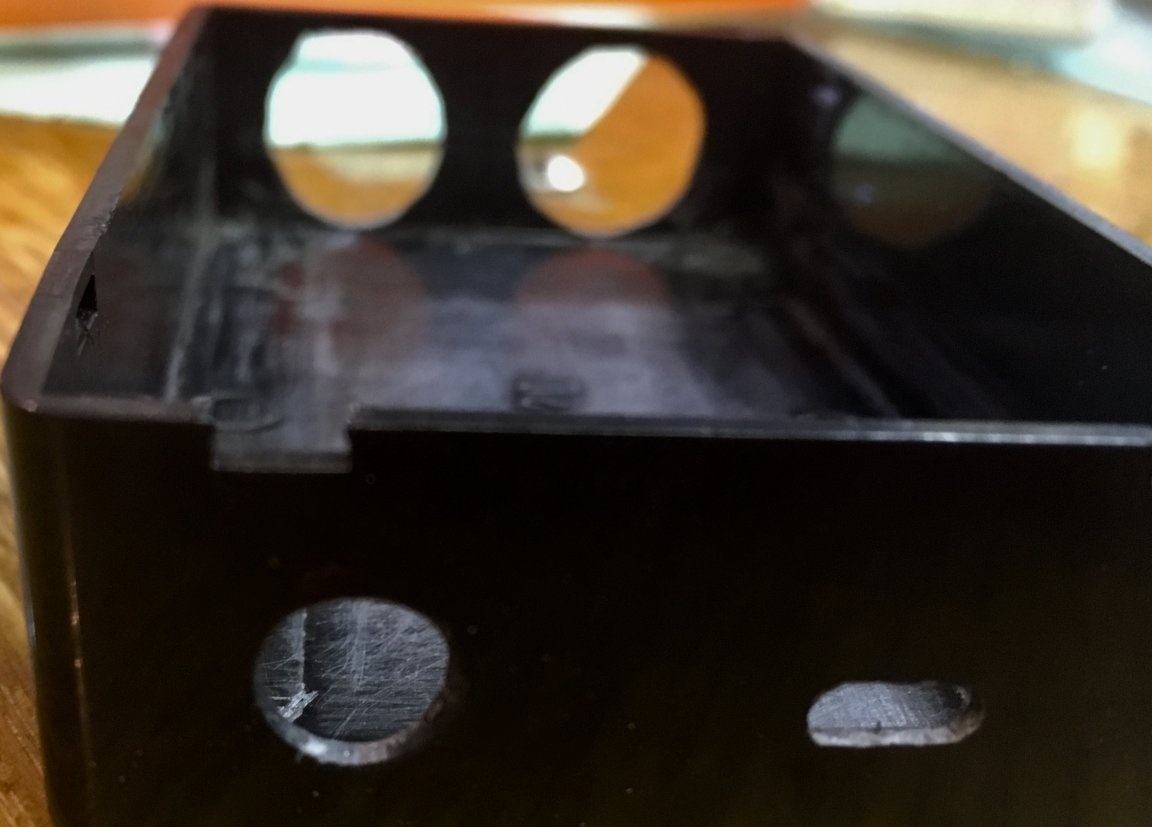
على الغطاء ، نقوم بعمل "نافذة" لمؤشر الأجزاء السبعة (في الصورة بدون معالجة) ، وننهي جميع المخالفات بملف.

الخطوة الثالثة.
في الرسم ، يتم تمييز المتغيرات التي يمكن تعديلها لنفسك. تم التعليق على جميع التعليمات البرمجية.
#include // مكتبات للعمل
# تتضمن
// ------------- لتكوين --------------------------------- --------------------------------
منطقية طويلة = 0 ؛ // 0 - قياس الطول من المستشعر
// 1 - قياس الطول من جدار السكن المقابل للمستشعر
عدد الصفحات غير الموقعة = 10 ؛ // المسافة من المستشعر إلى جدار الحالة المعاكس (بالسنتيمتر)
#define CLK 2 // دبابيس للتوصيل
# تعريف DIO 3
# تحديد TRIG 4
# تعريف ECHO 5
// ------------------------------------------------ ----------------------------------------------
الدافع غير الموقّع = 0 ؛ // متغيرات الحساب
int sm = 0 ؛
GyverTM1637 disp (CLK ، DIO) ؛
إعداد باطل () {
pinMode (TRIG ، OUTPUT) ؛ // تعيين كمخرج
pinMode (ECHO ، INPUT) ؛ // تعيين كمدخلات
disp.brightness (7) ؛ // السطوع 0-7
disp.point (0) ؛ // قم بإيقاف تشغيل القولون
disp.clear () ؛ // امسح المؤشر
}}
حلقة فارغة () {
الكتابة الرقمية (TRIG ، HIGH) ؛ // توريد 5 فولت
تأخير ميكروثانية (10) ؛ // تأخير 10 ميكروثانية
الكتابة الرقمية (TRIG ، LOW) ؛ // تخدم 0
الاندفاع = pulseIn (ECHO ، HIGH) ؛ // قياس طول النبض
sm = الدافع / 58 ؛ // تحويل إلى سنتيمترات
إذا كان (Long == 1) {// check settings
sm = sm + corpus ؛
}}
إذا كان (sm <= 2) {// صفر قيمًا خاطئة
sm = 1 ؛
}}
if (sm> = 405) {
sm = 1 ؛
}}
عدد صحيح = sm / 10 ؛
عدد عشري = sm٪ 10 ؛
عشري = عشري * 10 ؛
disp.displayClock (عدد صحيح ، عشري) ؛ // الإخراج إلى المؤشر
تأخير (300) ؛ // تأخير 0.3 ثانية. بين ناتج القيمة
}}
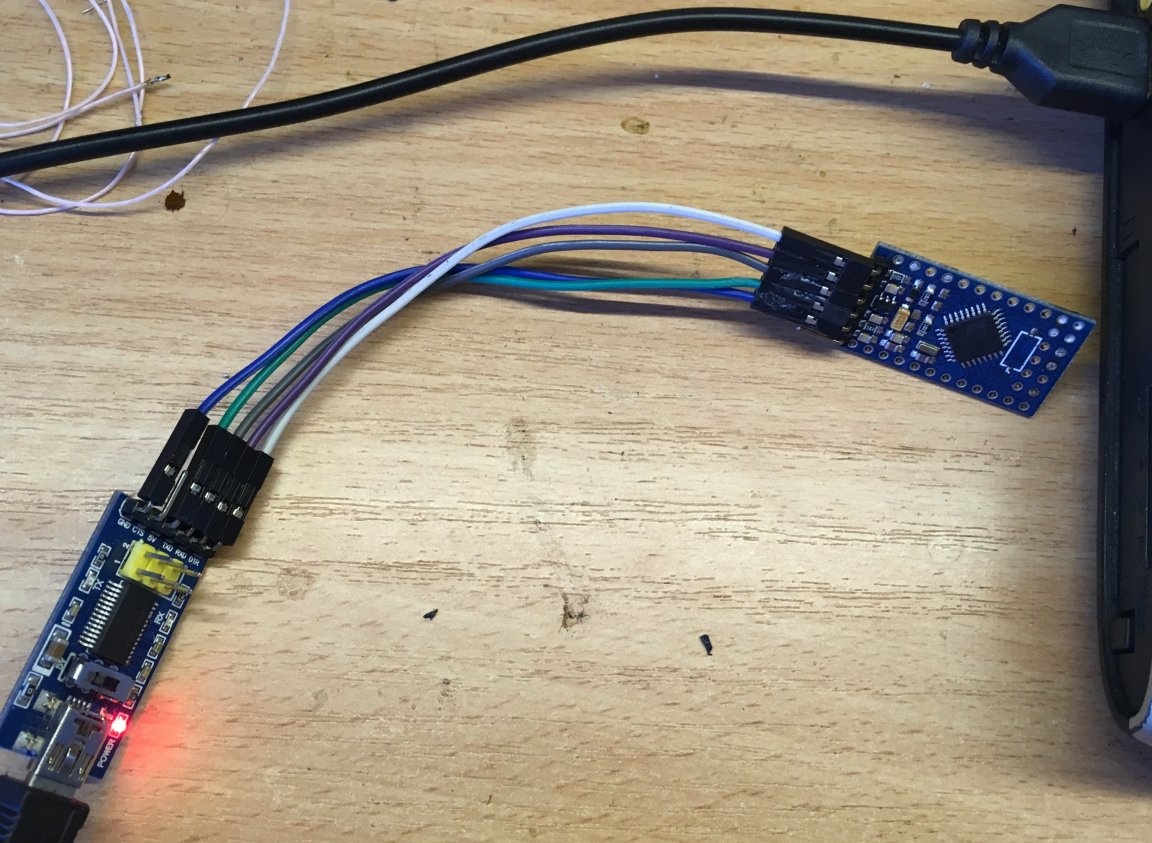
بعد ذلك ، قم بتوصيل المبرمج وفلاش MK.
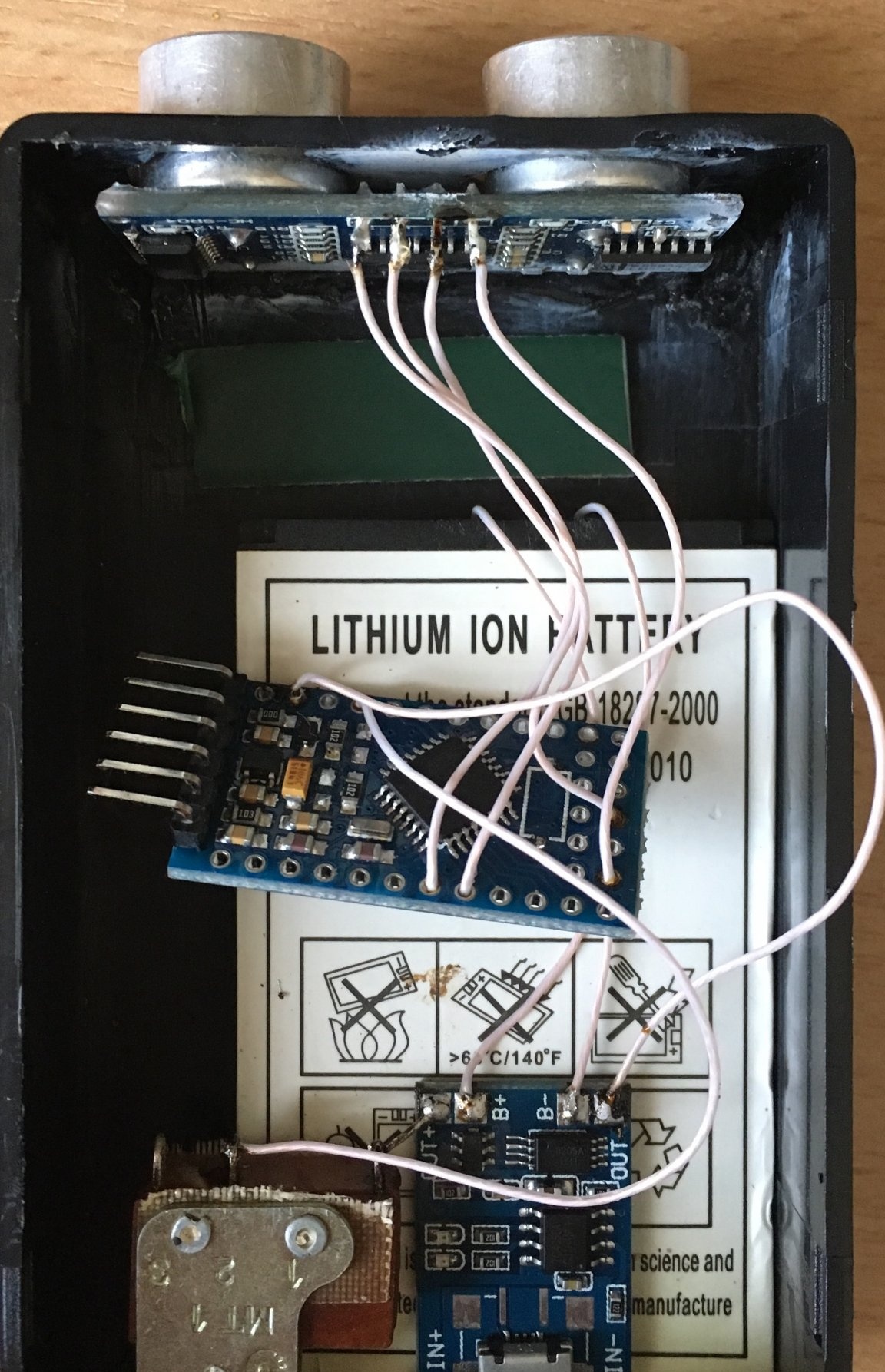
الخطوة الرابعة: التجميع:
نظرًا لأن الجهاز يعمل على طاقة البطارية ، لا نحتاج إلى شحن إضافي. لذلك ، على لوحة Arduino ، نقوم بلحام LEDs وزر إعادة الضبط (لتقليل الحجم).
الغراء البطارية للجسم على superglue. نلصق لوحة الشحن على البطارية ، ونثبت المفتاح ونلحم كل شيء وفقًا للمخطط.
نلصق المستشعر في العلبة ونلحم كل شيء وفقًا للمخطط. أولاً كانت هناك فكرة لوضع اللوح على شريط مزدوج الجوانب ، ولكن بعد ذلك تقرر التمسك به على الغراء الفائق. يمكن ثمل المؤشر أو لصقه.
الخطوة الخامسة: الاختبار:
ملاحظة: سيعرض الجزء الرابع دائمًا 0. وذلك للتأكد من أن الجزء الأخير ليس فارغًا. اتضح إذا كانت القراءة 270 ، فهذا يعني أن المسافة 27 سم.


للتأكد ، يمكن التحقق من الشهادة مع المسطرة.