







المفهوم الرئيسي لهذا المشروع هو أنه بمساعدة موجات الدماغ المختلفة ، سيكون المستخدم قادرًا على التحكم في الروبوت ، المؤشر على جهاز الكمبيوتر الخاص به أو تشغيل / إيقاف الأضواء في منزله ، في حين يقوم المتحكم الدقيق (Particle Photon) بإنشاء تحليل عبر الإنترنت لموجات دماغ المستخدم. لذا نعم ، مع هذا الجهاز ، يمكنك استخدام قوة الفكر
 ... هذا الجهاز ليس مخصصًا فقط للكسل أو المعجبين ، فقد تم إنشاؤه لمنح الأشخاص الفرصة. الذين يعانون كل يوم مع إعاقتهم. الروبوتتم تطويره من قبل المؤلف تمامًا مثل نظام الكراسي المتحركة المنزل سوف تساعد الأتمتة المستخدم على التحكم في الضوء أو التلفزيون ، حتى لو لم يتمكن من الحركة. يمكن أن يكون وضع تحكم الكمبيوتر مفيدًا حتى لأولئك الذين يتمتعون بصحة جيدة تمامًا.
... هذا الجهاز ليس مخصصًا فقط للكسل أو المعجبين ، فقد تم إنشاؤه لمنح الأشخاص الفرصة. الذين يعانون كل يوم مع إعاقتهم. الروبوتتم تطويره من قبل المؤلف تمامًا مثل نظام الكراسي المتحركة المنزل سوف تساعد الأتمتة المستخدم على التحكم في الضوء أو التلفزيون ، حتى لو لم يتمكن من الحركة. يمكن أن يكون وضع تحكم الكمبيوتر مفيدًا حتى لأولئك الذين يتمتعون بصحة جيدة تمامًا. كيف يعمل؟
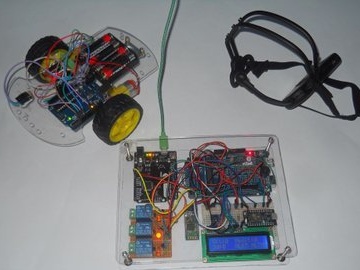

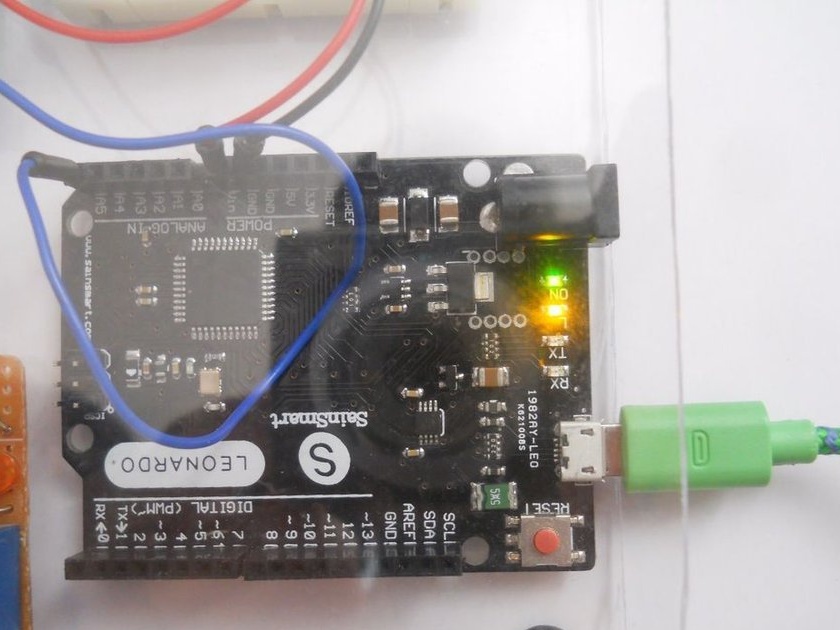
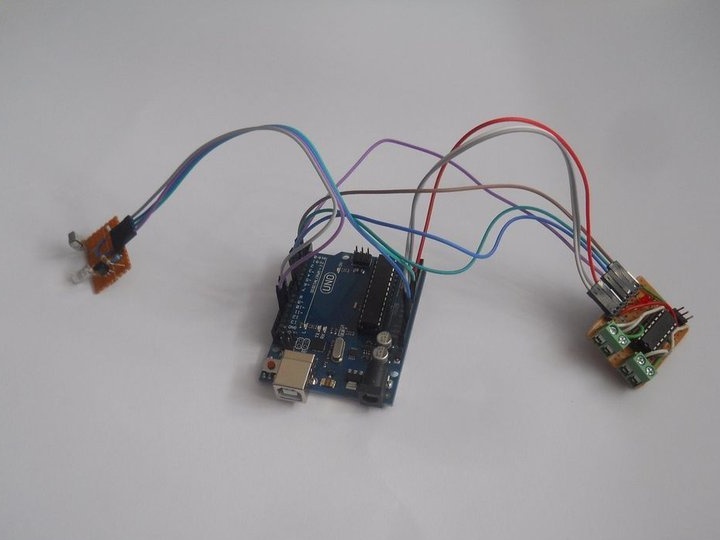
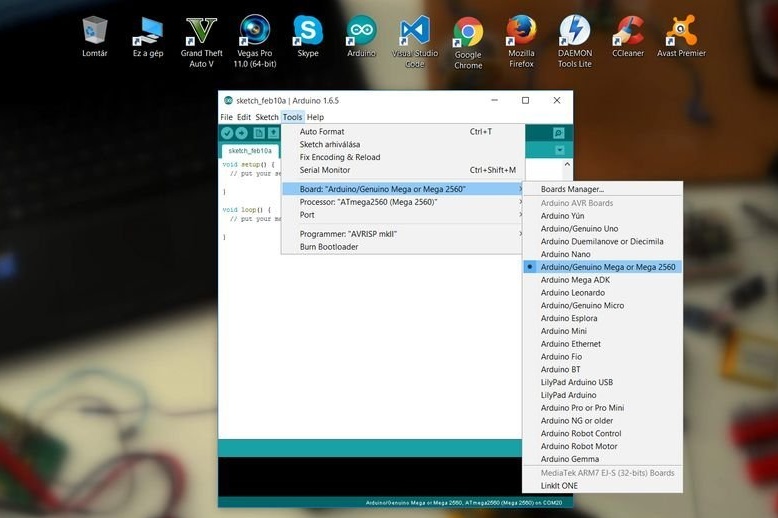
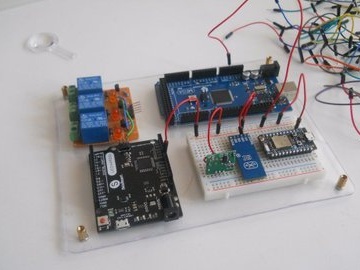
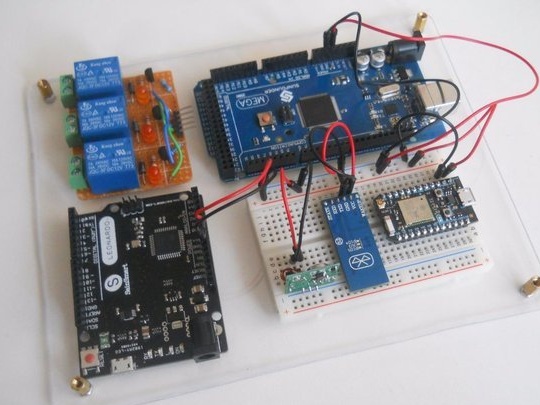
تم استخدام أربعة وحدات تحكم دقيقة لإحياء هذا المشروع: اردوينو ميجا ، اردوينو ليوناردو ، UNO وجسيمات الفوتون. Mega هو دماغ المشروع ، الذي يتلقى إشارات من سماعة الرأس ، ويحلل ويرسل الأوامر إلى الأجهزة الأخرى. يمرر جميع البيانات إلى Particle Photon ، الذي ينشئ خادم ويب. يتحكم ليوناردو في الماوس على جهاز الكمبيوتر ، ويستخدم Uno لاستقبال الأشعة تحت الحمراء (إشارات الأشعة تحت الحمراء) والتحكم في الروبوت. يمكن للجهاز التحكم في ثلاثة أجهزة مختلفة (أو أكثر إذا كنت تريد برمجة شيء آخر). علاوة على ذلك ، ستسمى هذه الأجهزة الثلاثة المختلفة القنوات. يقوم الجهاز بالتبديل بين هذه القنوات إذا أغلقت عينيك:
أغلق عينيك لمدة 1-2 ثانية: انتقل إلى وظيفة التشغيل الآلي للمنزل
أغمض عينيك لمدة 2-4 ثوانٍ: قم بالتبديل إلى وضع تحكم الروبوت
أغلق عينيك لمدة 1-6 ثوانٍ: قم بالتبديل إلى وضع تحكم الماوس
لجعل وظيفة التشغيل الآلي للمنزل ، والتي يمكنك توصيل أي شيء بها: تم استخدام التلفاز ، والمصابيح الكهربائية ، والمقابس ، وكل ما تريد ، والمرحلات
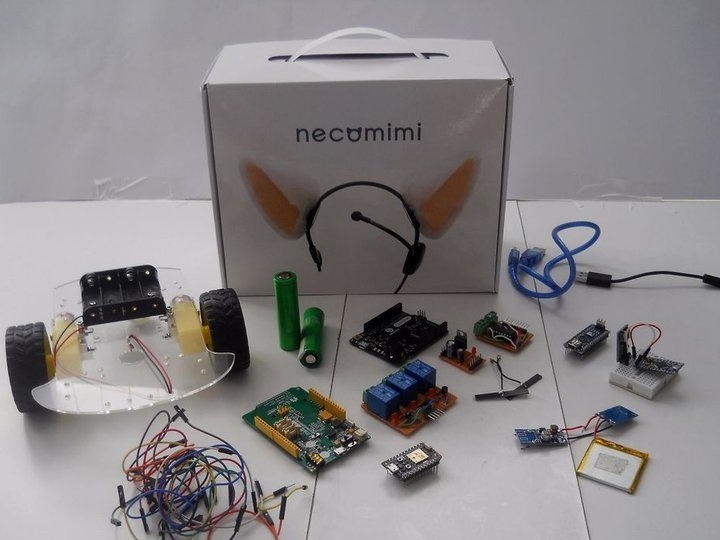
لتصور موجات الدماغ - Necomimi ، والتي يمكن أن تحرك أذنيك اعتمادًا على موجات الدماغ (الانتباه والتأمل). داخل شريحة صغيرة تقرأ موجات الدماغ ، تزيل الضوضاء وتعطي إشارة جيدة جدًا. يعمل مع واجهة UART (المسلسل) ، لذلك مع بعض الاختراق يمكننا استخدام Arduino لقراءة موجات الدماغ.يتمثل دور هذه السماعة في نقل موجات الدماغ لاسلكيًا إلى خادم مركزي.
إذا كنت تعرف بالفعل المشروع السابقثم يمكنك تخطي مرحلة تفكيك Necomimi وإعادة تشكيلها.
انتقل لأسفل لمعرفة كيفية فك سماعة الرأس اللاسلكية وإخراجها منها.
نظام التحكم في التشغيل الآلي للمنزل
إذا قمت بالتبديل إلى وضع التشغيل الآلي للمنزل ، فقم بزيادة مستوى انتباهك فوق 70 لتشغيل التتابع الأول ، وزيادة مستوى التأمل فوق 70 لتشغيل التتابع الثاني ، وزيادة كلتا القيمتين فوق 70 لتشغيل التتابع الثالث. إنها صعبة بعض الشيء ، لكنها ليست مستحيلة بعد بعض تدريب العقل. إذا كان التتابع قيد التشغيل بالفعل ، فاستخدم نفس الأمر لإيقاف تشغيله (إذا كان قيد التشغيل ، فقم بالوصول إلى 70 لإيقاف تشغيله). عندما يكون النظام جاهزًا ، يمكن توصيل أي جهاز عالي الجهد (ضوء ، تلفزيون ، كمبيوتر ، مروحة ، أي شيء) بوحدة الترحيل.
التحكم بالماوس
يتم التحكم في المؤشر من خلال العواطف. إذا كان مستوى الانتباه أقل من 25 ، فإنه يتحرك إلى اليسار ، إذا انتقل بين 25 و 50 إلى اليمين ، إذا ارتفع بين 50 و 75 ، وإذا انخفض بين 75 و 100. يمكنك ان تنقر نقرة على زر الفأرة بزيادة مستوى التأمل. بالطبع ، تحتاج إلى التدريب على ذلك.
التحكم في الروبوت
الروبوت لديه ثلاثة فرق مختلفة فقط: توقف ، اتجه يسارا والمضي قدما. لماذا خياران فقط للحركة؟ لأن هذين الاتجاهين يكفيان لتحريك الروبوت إلى أي مكان. استخدم مستوى التأمل الخاص بك للتدوير مع الروبوت ، وعندما تصل إلى الاتجاه الذي تريد تحريكه ، أوقف الروبوت ، ثم انتقل إلى الأمام بمستوى الاهتمام. هذه هي أفضل طريقة للتحكم في الروبوت ، وحتى المبتدئين الذين لا يمكنهم التحكم في قيم انتباههم / تأملهم بشكل جيد يمكنهم اللعب مع هذا الروبوت.
تنقل سماعة الرأس إشارات BT (Bluetooth) إلى Arduino Mega ، الذي يحلل وحدات البايت الواردة ، ويتحكم في وظائف مختلفة ، اعتمادًا على أفكار المستخدم. في البداية ، أراد المؤلف استخدام Particle Photon كمرسل بيانات ، ولكن هذه الوحدة الصغيرة حصلت على دور في إنشاء خادم الويب. كان أكبر تعديل في المشروع بأكمله. استخدم أيضًا وحدات Arduino محلية الصنع ، ولكن يمكنك شراء هذه الوحدات عبر الإنترنت.
جميع الأجزاء من GearBest.com. هذا متجر على الإنترنت ، مثل eBay ، ولكن يتم تسليم قطع الغيار بشكل أسرع (ربما كل هذا على aliexpress). لذلك ، إذا كنت ترغب في إنشاء وحدة تحكم لعبة أو جهاز تحكم آلي أو Force Detecto r ، ابدأ بشراء قطع غيار.






الأدوات المطلوبة:
حام الحديد
اللحيم
مسدس الغراء
شريط ذاتي اللصق / شريط مزدوج الجوانب
متجرد الأسلاك
قطع الأسلاك
المعدات
/ اردوينو نانو
البرمجيات:
اختراق Necomimi







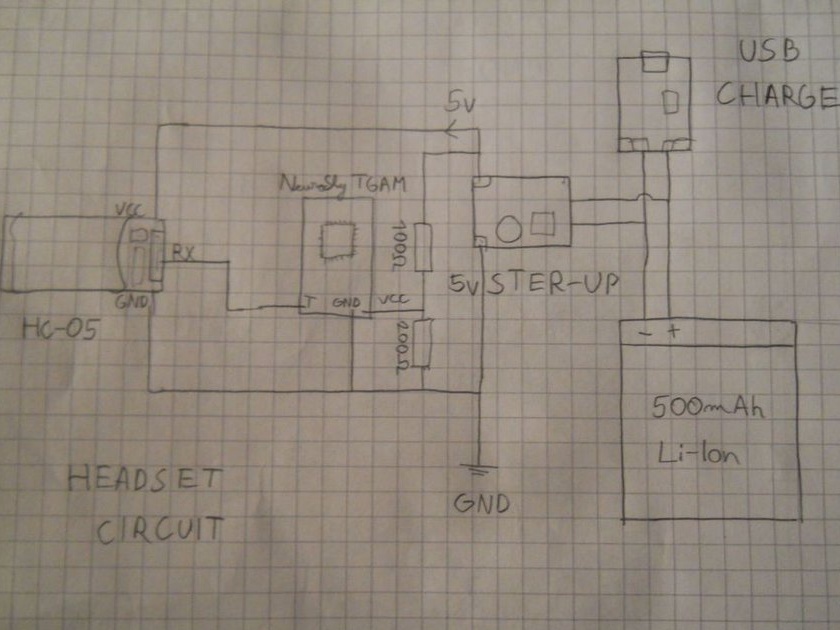
نريد تعديل لعبة EEG هذه لنقل البيانات عبر البلوتوث ، لذا سنقوم أولاً بتفكيك العلبة. مسامير تحت الملصق. قم بإزالة الملصق والجزء الخلفي من الجهاز وستجد لوحات صغيرة بداخله. واحد تحت اللوحة الرئيسية هو شريحة Neurosky TGAM. 4 أسلاك من اللوحة الرئيسية للميكروكونترولر ملحومة بها ، لذا خذ مكواة لحام وأزل هذه الدائرة بعناية. الآن لحام الأسلاك الثلاثة إلى دبوس GND ، إلى دبوس VCC ، وإلى دبوس T. دبوس T هو مخرج إرسال عند 57600 بود ، يرسل حزم البيانات إلى وحدة التحكم الدقيقة الخاصة بنا. بمجرد لحام الأسلاك الثلاثة المذكورة أعلاه ، يمكنك بناء مصدر الطاقة الخاص بك القابل لإعادة الشحن. يستخدم المؤلف بطارية 500 mAh ليثيوم أيون ، ودائرة شاحن USB ، ودائرة تعزيز 5 فولت ، ومقاومين (100 أوم و 200 أوم) لتوفير مصدر طاقة منفصل 3.4 فولت للشريحة ووحدة Bluetooth. في الصورة ، مخطط الاتصال.
إذا كانت الدائرة جاهزة ، فقم بتكوين وحدة Bluetooth.
اتبع التعليمات والأشكال أدناه وقم بإنشاء سماعة رأس لاسلكية EEG خاصة بك.
الجزء الأكثر أهمية هو توصيل دبوس "T" بـ "RX" في وحدة Bluetooth.



HC-06: قم أولاً بتحميل الرسم المسمى “HC_06_Bluetooth” إلى Arduino UNO ، ثم قم بتوصيل وحدة Bluetooth كما هو موضح في الرسم التخطيطي.
// HC-06-Bluetooth
إعداد باطل () {
// بدء تشغيل تسلسل الأجهزة.
Serial.begin (9600) ؛ // الافتراضية HC-06 معدل الباود
تأخير (1000) ؛
Serial.print ("AT") ؛
تأخير (1000) ؛
Serial.print ("AT + VERSION") ؛
تأخير (1000) ؛
Serial.print ("AT + PIN") ؛ // لإزالة كلمة المرور
تأخير (1000) ؛
Serial.print ("AT + BAUD7") ؛ // اضبط معدل البث بالباود على 576000 - على سبيل المثال Necomimi dafault
تأخير (1000) ؛
المسلسل يبدأ (57600) ؛ //
تأخير (1000) ؛
}}
حلقة فارغة () {
}}افتح الشاشة التسلسلية في Arduino IDE وانتظر حتى يقوم Arduino بتكوين وحدة BT. تم ضبط وحدة Bluetooth الخاصة بك الآن على 57600 بود. يمكنك تجربة العديد من تطبيقات BCI (Brain Computer Interface) لأن لعبة Necomimi المخترقة ستكون متوافقة مع أي تطبيقات Neurosky.
يمكنك استخدام هذه التطبيقات لمعرفة كيفية التحكم في موجات دماغك.
HC-05: ثم استخدم "HC_05_Bluetooth" وقم بتحميل Arduino بنفس الطريقة التي كان عليها من قبل.
// HC-06-Bluetooth
إعداد باطل () {
// بدء تشغيل تسلسل الأجهزة.
Serial.begin (9600) ؛ // الافتراضي HC-05 معدل الباود
تأخير (1000) ؛
Serial.print ("AT") ؛
تأخير (1000) ؛
Serial.print ("AT + VERSION") ؛
تأخير (1000) ؛
Serial.println ("AT + ROLE = 1") ؛ // اضبط HC-05 على الوضع الرئيسي
تأخير (1000) ؛
Serial.println ("AT + LINK =" أدخل عنوانك هنا ") ؛ // الآن يجب توصيل الوحدة تلقائيًا
تأخير (1000) ؛
Serial.print ("AT + UART = 57600،1،0") ؛ // اضبط معدل البث بالباود على 576000
المسلسل يبدأ (57600) ؛ //
تأخير (1000) ؛
}}
حلقة فارغة () {}}
قم بتوصيل دبوس "EN" من HC-05 بـ 3v3 Arduino. يجب عليك كتابة عنوان وحدة HC-06 الخاصة بك في التعليمات البرمجية. تحقق من عنوان وحدة BT على هاتف Android الذكي. استبدل ":" (النقاط المزدوجة) بفواصل "،" في الكود.
ويجب عليك تغيير العنوان في الكود: 20: 15: 09: 15: 17: 82 = 2015.09.151782 وبالتالي ، يمكن للوحدة HC-05 التعرف على العنوان.
جهاز تحكم عن بعد
لإنشاء هذا الروبوت غير مكلفة ، تم استخدام مستشعر الأشعة تحت الحمراء 38 كيلو هرتز ، والذي يستخدم في أجهزة التحكم عن بعد في التلفزيون.
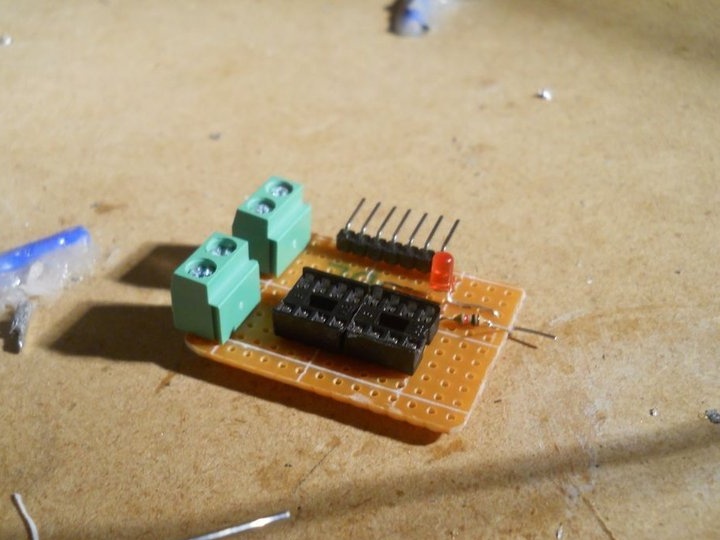
سائق المحرك
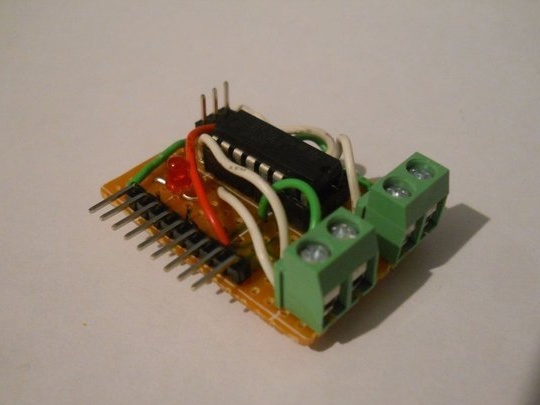
مخطط محرك المحرك - ستحتاج إلى التفاصيل التالية:
2 محطات المسمار
L293D IC3
رأس العنوان (90 درجة)
1 كيلو المقاوم
LED أحمر
الأسلاك
لوحة الدوائر
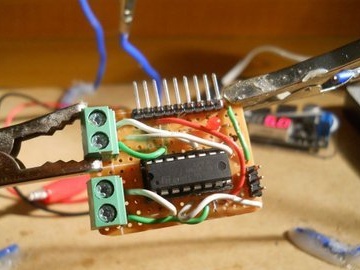
باستخدام عدة أسلاك نحاسية ، وبعد الرسم البياني ، قم بتوصيل دبابيس الدائرة المصغرة بدبابيس الموصل. لا يهم أي جزء من الدائرة المصغرة أي دبوس من الموصل ، فقط تذكر مكان توصيلها. يتم توصيل LED في سلسلة مع المقاوم وبالتوازي مع 5 V VCC.
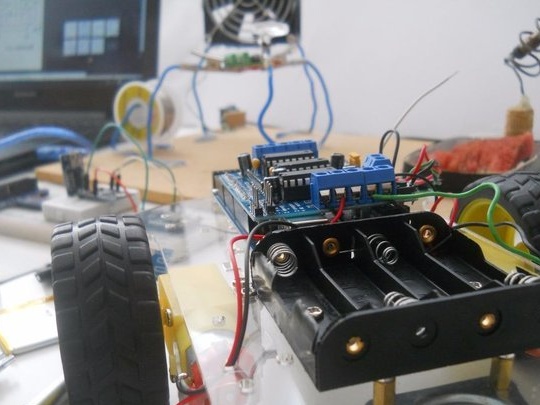
تجميع الشاسيه
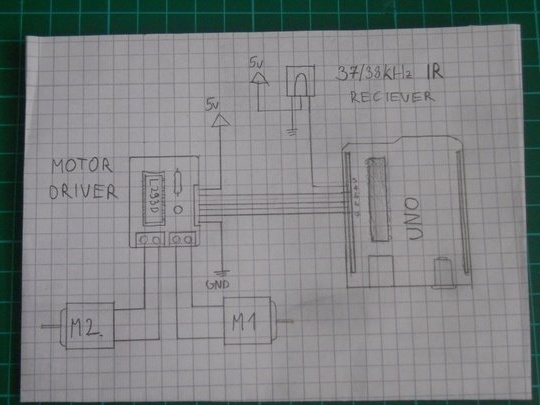
كسائق محرك كهربائي ، يتم استخدام شريحة L293D ، والتي يمكنها التحكم في محركين. انظر إلى الرسم التخطيطي لبناء الرسم التخطيطي.
ربط أجزاء لاردوينو
اردوينو دبوس == & GT. سائق محرك
4 == & GT. 15
5 == & GT. 10
6 == & GT. 7
7 == & GT. 2
VIN == & GT. 85v == & GT. 1 ، 9 ، 16
GND == & GT. 4 ، 5 ، 13 ، 12
لذا ، انظر إلى الرسم البياني للدائرة لوحدة L293D ، ثم قم بتوصيل جهات اتصالها بـ Arduino UNO ، كما هو موضح أعلاه. يجب توصيل Pin 5v Arduino بالطرف 1 ، 9 ، 16 لتنشيط وظيفة التحكم في محرك الرقاقة. ثم استخدم أخيراً أطراف المسمار لتشغيل المحركات.
تستخدم المكتبة IRremote ، وهو رمز يقرأ إشارات الأشعة تحت الحمراء 38 كيلو هرتز ، ويفك تشفيرها ، ثم ينقل الروبوت. (قم بتنزيل المكتبة في قسم "البرمجيات").
هناك تعليقات في الكود ، ولكن خلاصة القول هي أنه يقوم بفك تشفير إشارات الأشعة تحت الحمراء القادمة من الخادم الرئيسي ، ثم ، اعتمادًا على ما يريده المستخدم ، يقوم بتشغيل المحركات ، وبعد ذلك يتحرك الروبوت إلى الأمام أو يستدير إلى اليسار. تنزيل الكود: "Robot_Code". قم بتنزيل هذا على Arduino وسيكون الروبوت الخاص بك جاهزًا.
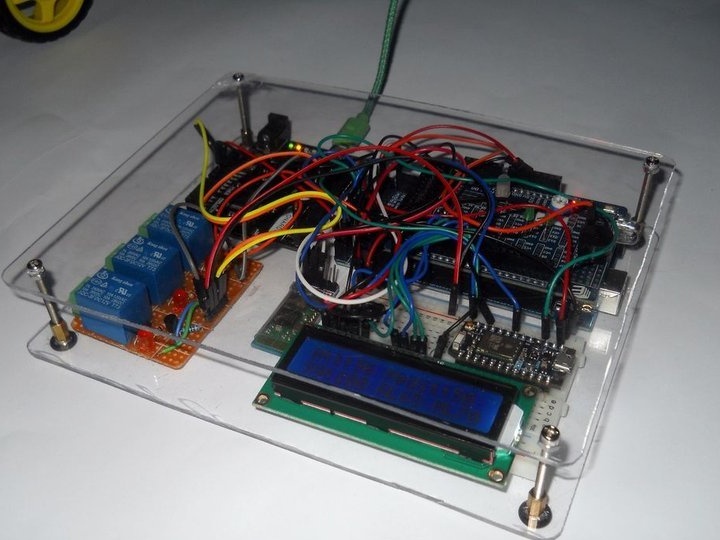
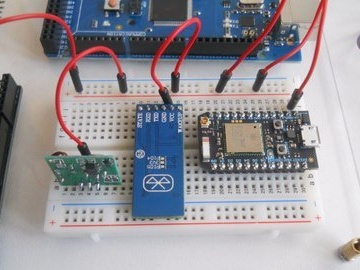
الخادم الرئيسي (Arduino Mega، Leonardo، Photon)




يقرأ الخادم حزم البيانات الواردة من سماعة الرأس اللاسلكية. سنستخدم وحدة BT التي تم تكوينها لتوفير الاتصال بين سماعة الرأس والخادم. Arduino Mega هو دماغ الدائرة بأكملها ، كل شيء متصل بوحدة التحكم الدقيقة هذه: Bluetooth ، LED جهاز إرسال بالأشعة تحت الحمراء ، خادم الويب ووحدة تحكم الماوس. الرمز معقد قليلاً ، ولكن كقاعدة عامة ، لديه تعليقات لفهمها.
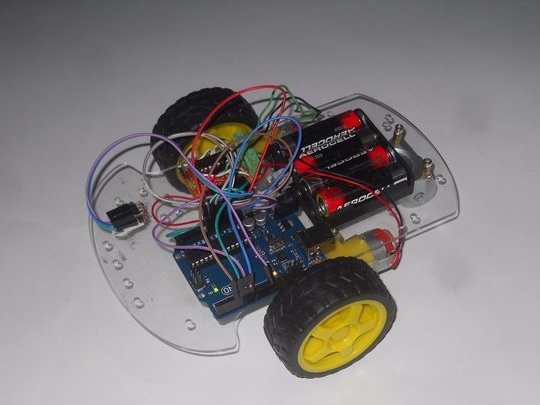
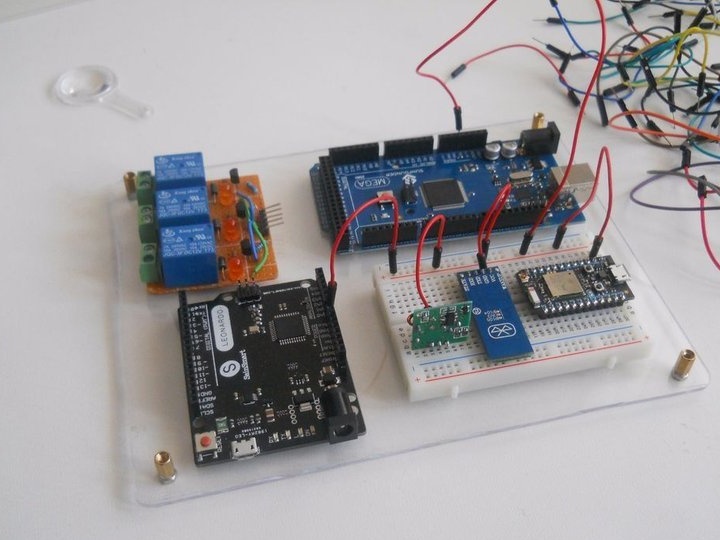
الإسكان
كل شيء بسيط. لوحان من زجاج شبكي مقاس 18x15 سم ، ينعمان الحواف بورق الصنفرة. عدة مسامير لربطها ببعضها البعض.
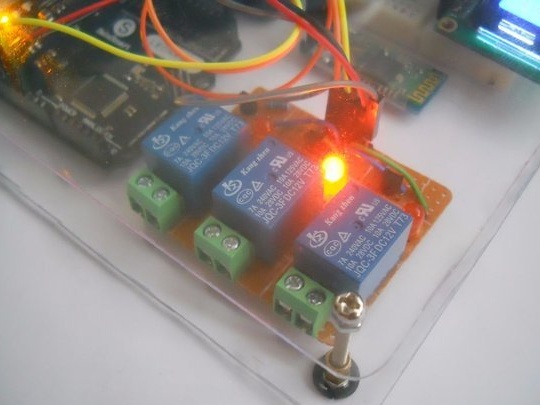
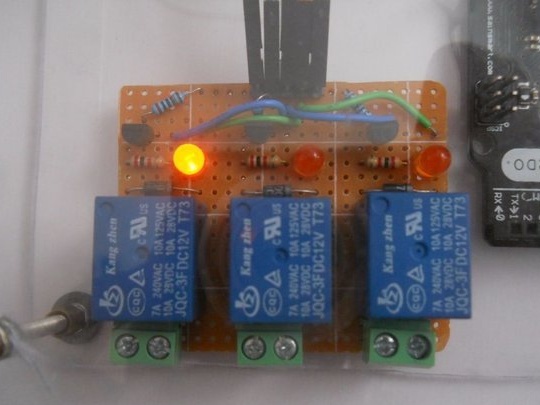
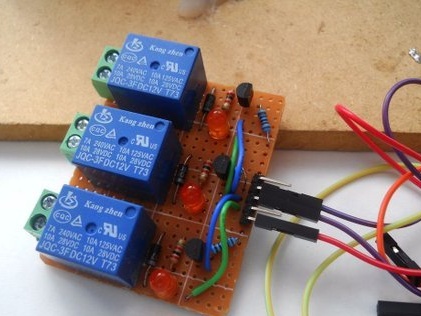
لوحة التتابع
ستحتاج إلى التفاصيل التالية:
2n2222 الترانزستور (3 قطع)
ثنائيات الجرمانيوم (3 قطع)
330 مقاوم أوم (3 قطع)
1 مقاومات أوم (3 قطع)
ريلاي 5 فولت (3 قطع)
موصلات دبوس
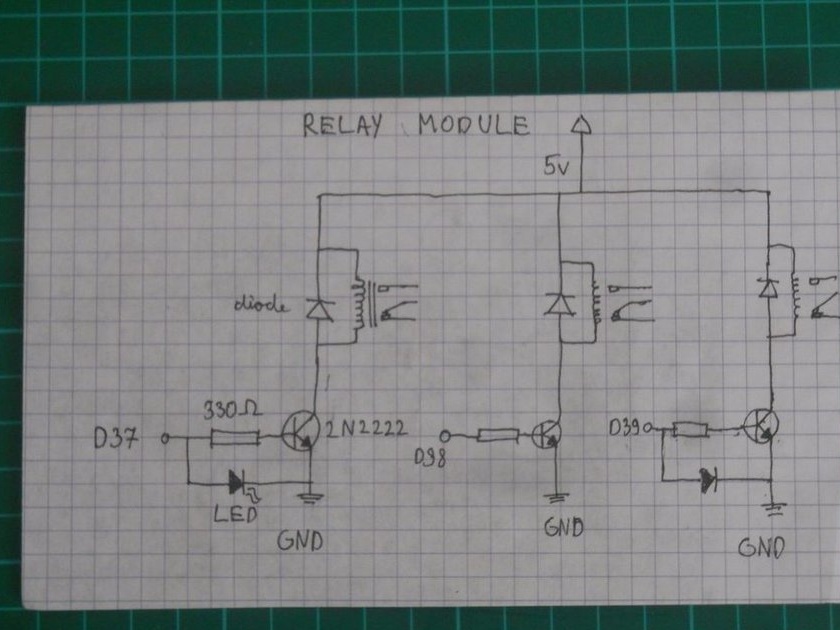
لوحة الدوائر
تساوي الصورة أكثر من ألف كلمة ، لذا انظر إلى الرسم التخطيطي لكيفية توصيل الأجزاء على لوحة الدوائر المطبوعة.
إذا كان إخراج "الإشارة" من Arduino ، فسيتم تشغيل التتابع. يعمل الترانزستور على تضخيم الإشارة لتوفير طاقة كافية للمرحل. سنستخدم 37-38-39 جهة اتصال للتحكم في المستويات العالية المنخفضة لكل مرحل.
لتثبيت الأجزاء على علبة زجاجية ، استخدم المؤلف شريطًا ذا وجهين. لديه التفاصيل.
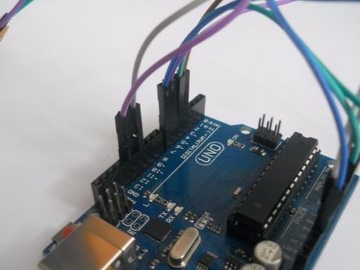
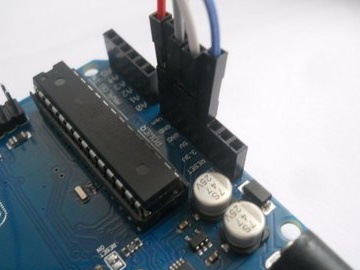
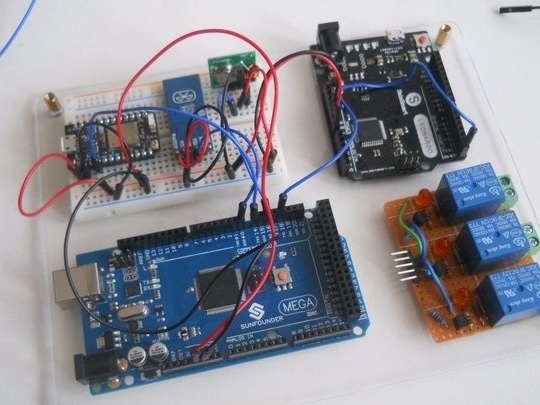
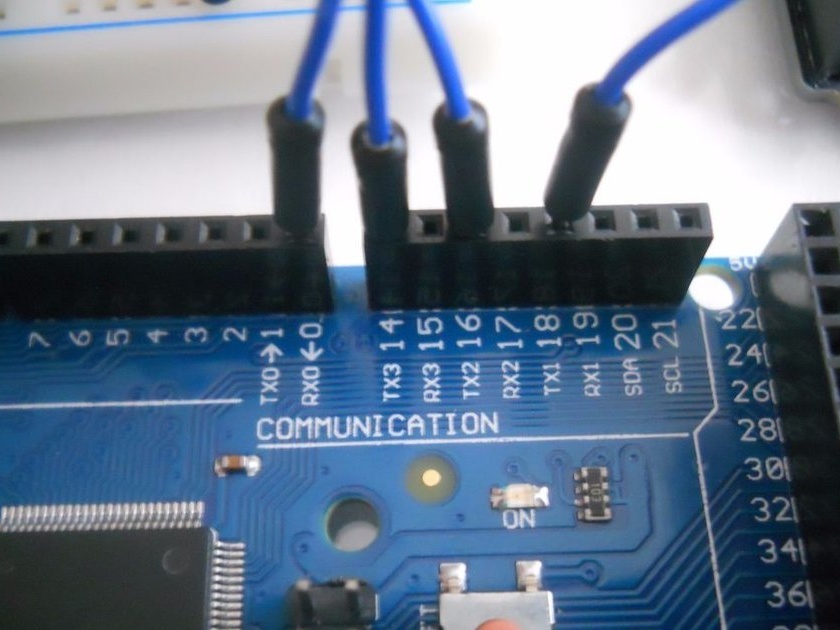
هذا خادم برمجيات ، لذا فإن إنشاء دائرة ليس بالأمر الصعب. تحتاج فقط إلى تشغيل وحدات التحكم الدقيقة وإقامة اتصال بينهما. يتم توصيل IR LED بطرف D3 ، ويتم توصيل التتابع بـ 37-38-39. يذهب D16 Arduino Mega إلى RX Photon و D18 إلى RX Leonardo.
اتصال الروبوت
[2.02 كيلوبايت] (التنزيلات: 14)
ولكن الآن الكود جاهز ويعمل ، لذلك عليك فقط تنزيل وحدات التحكم الدقيقة الخاصة بك. قم بتنزيل ملف .ino أو انسخ / الصق الرمز في IDE واستخدمه. يجب تنزيل رمز Particle Photon عبر متصفح IDE. للقيام بذلك ، قم بالتسجيل في. وصِّل الكمبيوتر المحمول بوحدة التحكم الدقيقة. كل شيء يحدث تلقائيًا تقريبًا ، ما عليك سوى إضافة معرّف جهازك.
قبل تنزيل الرموز ، تأكد من عدم توصيل أي شيء بدبابيس RX / TX. لذا افصل وحدة Bluetooth الخاصة بك من Mega ، وافصل Mega من Leonardo و Photon.
[489 ب] (التنزيلات: 15)

خادم الويبلإضافة وظيفة IoT (إنترنت الأشياء) إلى مشروعه ، قام المؤلف بعمل مسجل بيانات عبر الإنترنت باستخدام Particle Photon. اعتمادًا على ما تفعله مع الجهاز ، يقوم Photon بإنشاء خادم شخصي وكتابة البيانات إلى السحابة.قد يبدو هذا مخيفًا في البداية ، لكن تخيل أنه يمكنك تحديد ما إذا كنت مرهقًا (مستويات الانتباه تزداد وتنخفض بسرعة) أم أنه يستحق النوم
(مستوى التأمل فوق 80 دائمًا)
. يمكن لخادم الويب هذا مساعدتك على العيش بصحة أفضل.
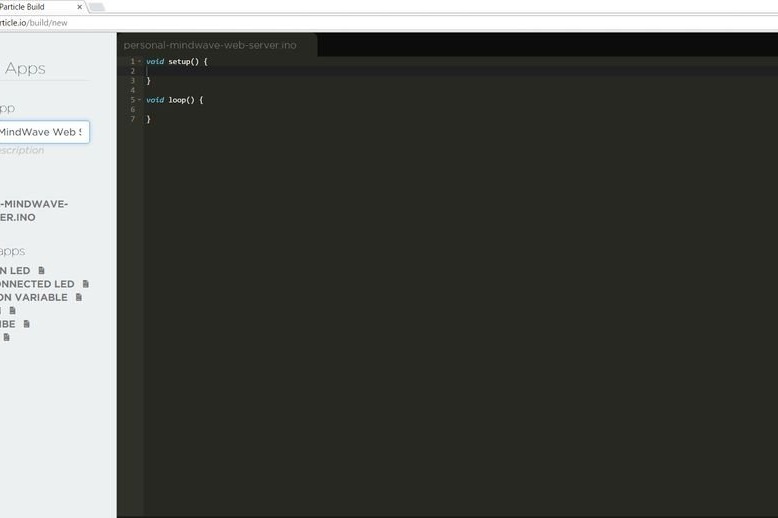
ترميز المتصفح
يحتوي الجسيم أيضًا على لوحة على الإنترنت حيث يمكنك نشر أي بيانات باستخدام "Particle.publish ()؛" بناء الجملة. وفر مطورو شريط الأدوات الكثير من الوقت للمستخدمين.
