
اشتريت لعبة رائعة لابني علي - حفارة على جهاز تحكم لاسلكي.
اتضح أنه عيب خطير ، يتم التعبير عنه في غياب محددات ذراع الرافعة. على سبيل المثال إذا قمت برفع السهم إلى الحد الأقصى ، فإنه يبدأ في التصدع ، وينطبق الشيء نفسه على دوران البرج حول المحور (670 درجة). ونتيجة لذلك ، غالبًا ما يكون هناك صدع حتى مع حمولة صغيرة. يدور حول المحور بشكل عام في اتجاه واحد بصعوبة كبيرة. لقد فككت هذا الجهاز وجاءت الفكرة لترقيته.
1. استبدل المحركات الموجودة على الهيكل بأخرى ، أكثر قوة (على الرغم من أن هذا محل تساؤل في الوقت الحالي). وإجراء تعديل للسرعة. الآن السرعة واحدة ثابتة - للأمام أو للخلف.
2. قم بتعيين محددات حركة ذراع الرافعة ، والتي ستصل إلى الحد الأقصى لرفع ذراع الرافعة والتوقف ، ثم في الاتجاه المعاكس فقط.
3. استبدل المحركات في ذراع الرافعة بمحركات السائر أو الماكينات. هنا تحتاج مساعدة فهم الناس. أيهما أفضل لهذا الدور؟ وهل هي مناسبة على الإطلاق؟ أود أن يتعامل الحفار مع المهام ليشعر بأنه أكثر تعقيدًا من تحميل الرمال المتحللة ، على الرغم من أن هذا صعب بالنسبة له الآن - التروس تتشقق ...
4. البطارية أقوى وأكبر للتثبيت. هناك ، في هذه الحالة ، قضبان فولاذية لثقل موازن. يمكنك فقط ملء الفراغ. هناك مساحة كبيرة للتجارب :)
5. وبناءً على ذلك ، أريد استبدال اللوحة الموجودة في الحفار نفسه بأردوينو وإضافة وحدة WiFi للتحكم في الجهاز. وسيتعين على جهاز التحكم عن بُعد أيضًا القيام بعمل آخر. هنا السؤال. الذي اردوينكا لاتخاذ؟ أي واحد سيتعامل؟ نانو ، أونو؟ ما هو مطلوب هو ربط 6 محركات مع اردوينو (الهيكل - 2 ، إلى البرج ، و 3 إلى الطفرة). هل من المحتمل أن تحتاج إلى مثبت جهد؟
بشكل عام ، ما الذي تنصحون به لتنفيذ هذه الفكرة؟ إذا كنت تعتقد أن المهمة غير مجدية ، اشرح لأي سبب من فضلك. أريد حقًا أن أفعل مع ابني ، حتى لو كان معتادًا على تعلم أشياء جديدة ، وليس على التعلم ... :)
الصور.
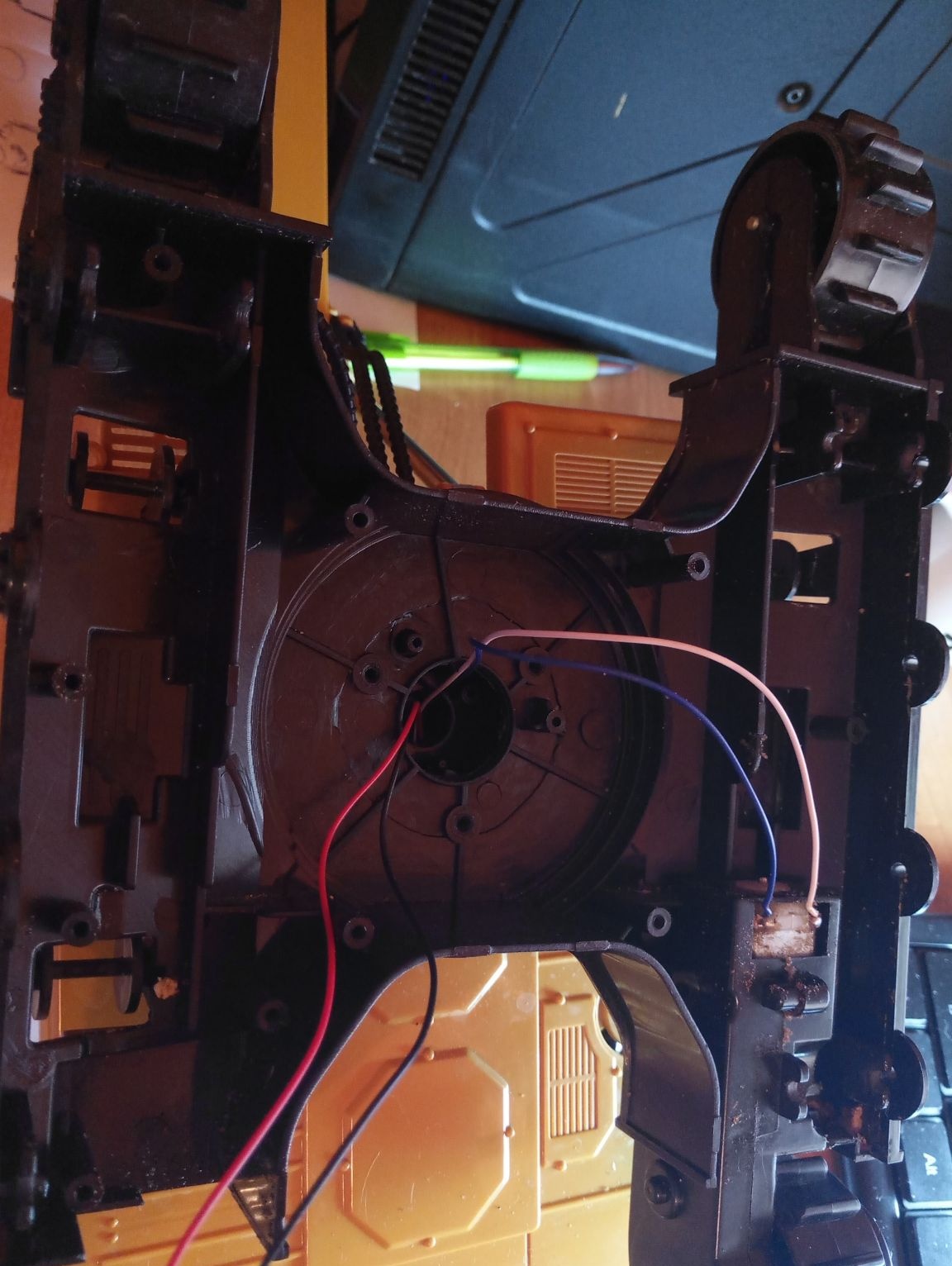
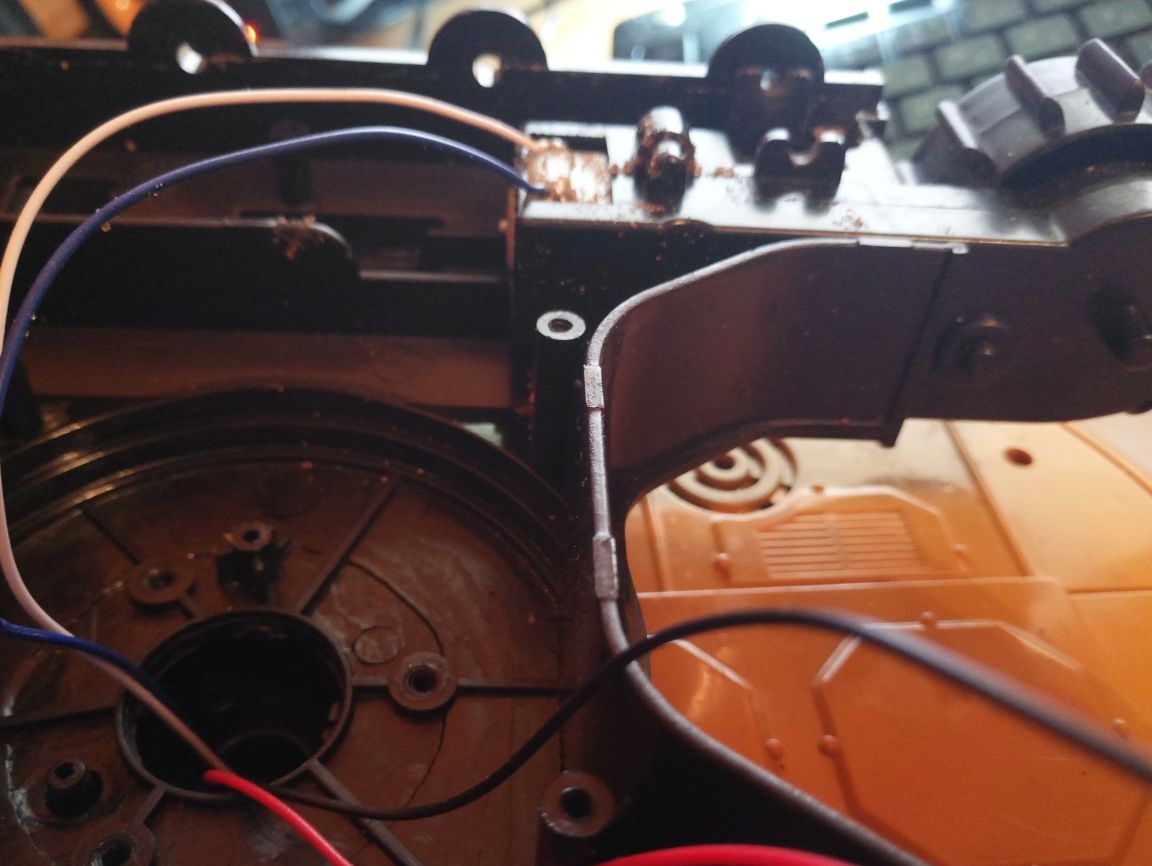
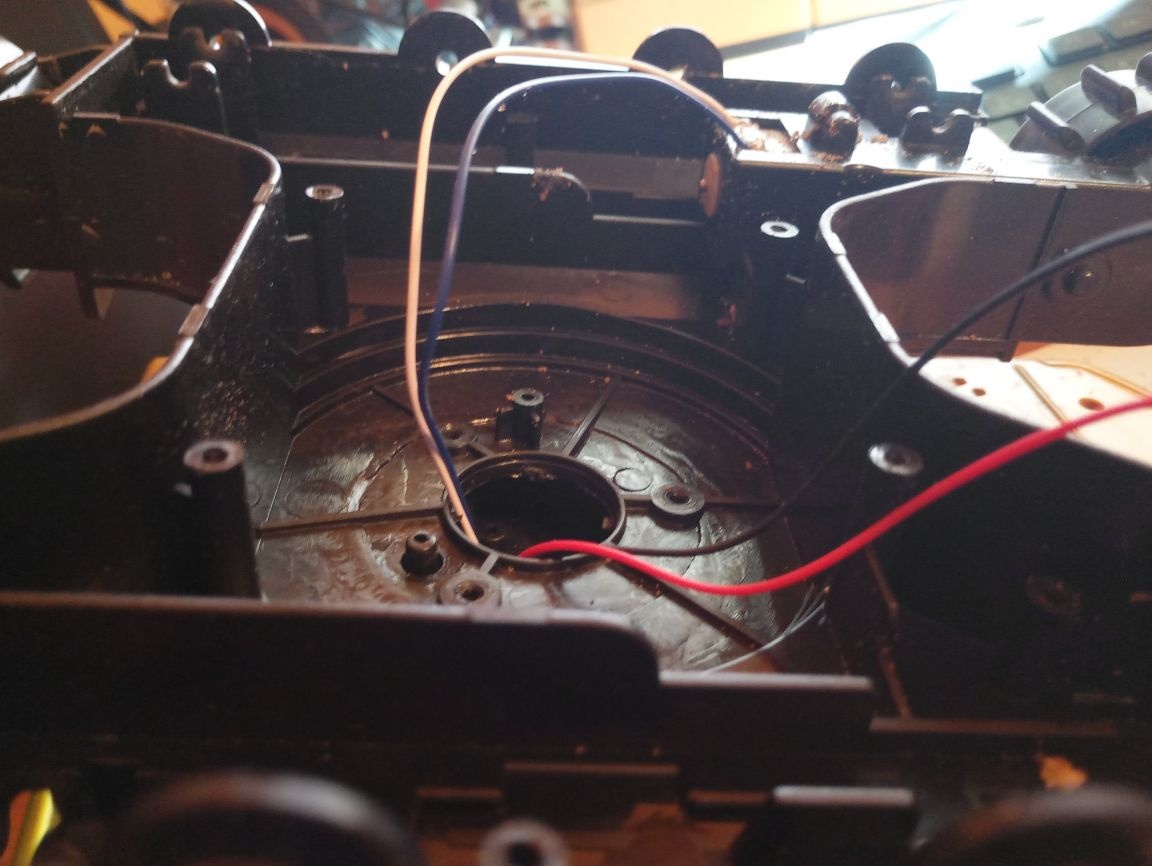
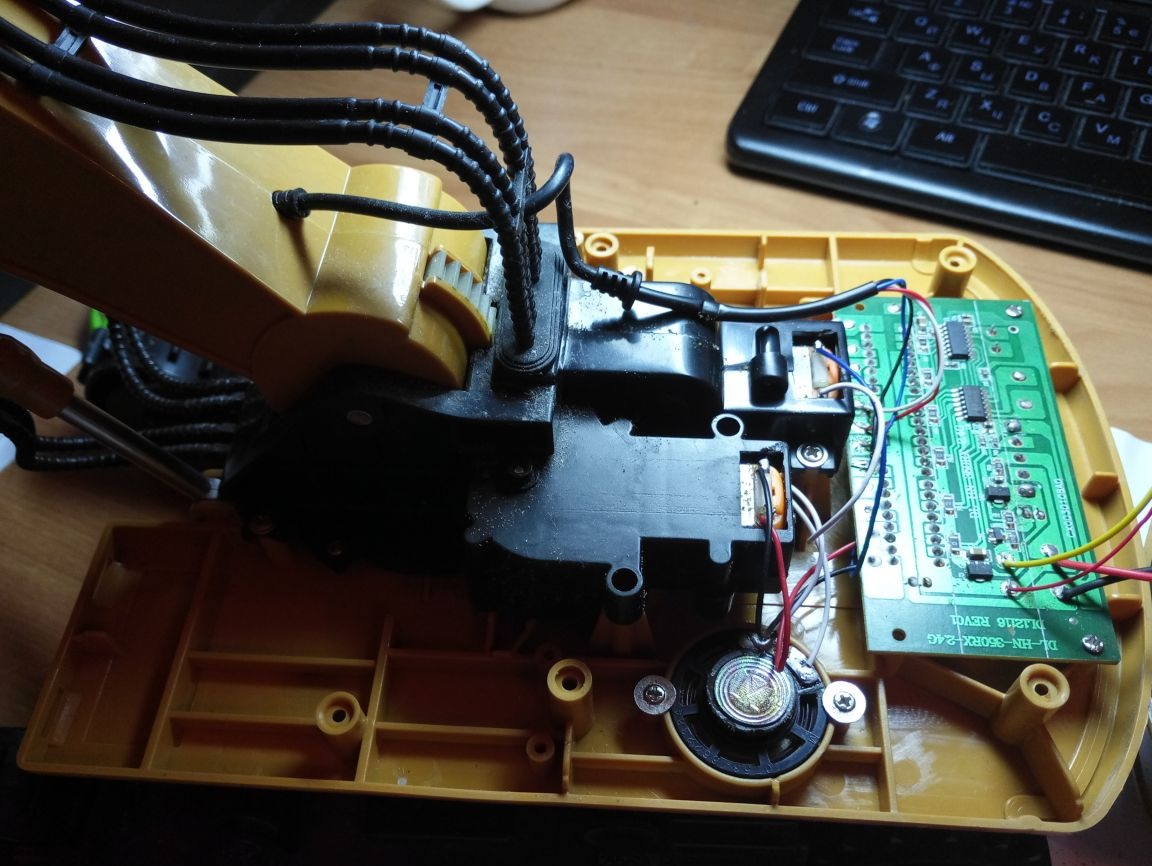
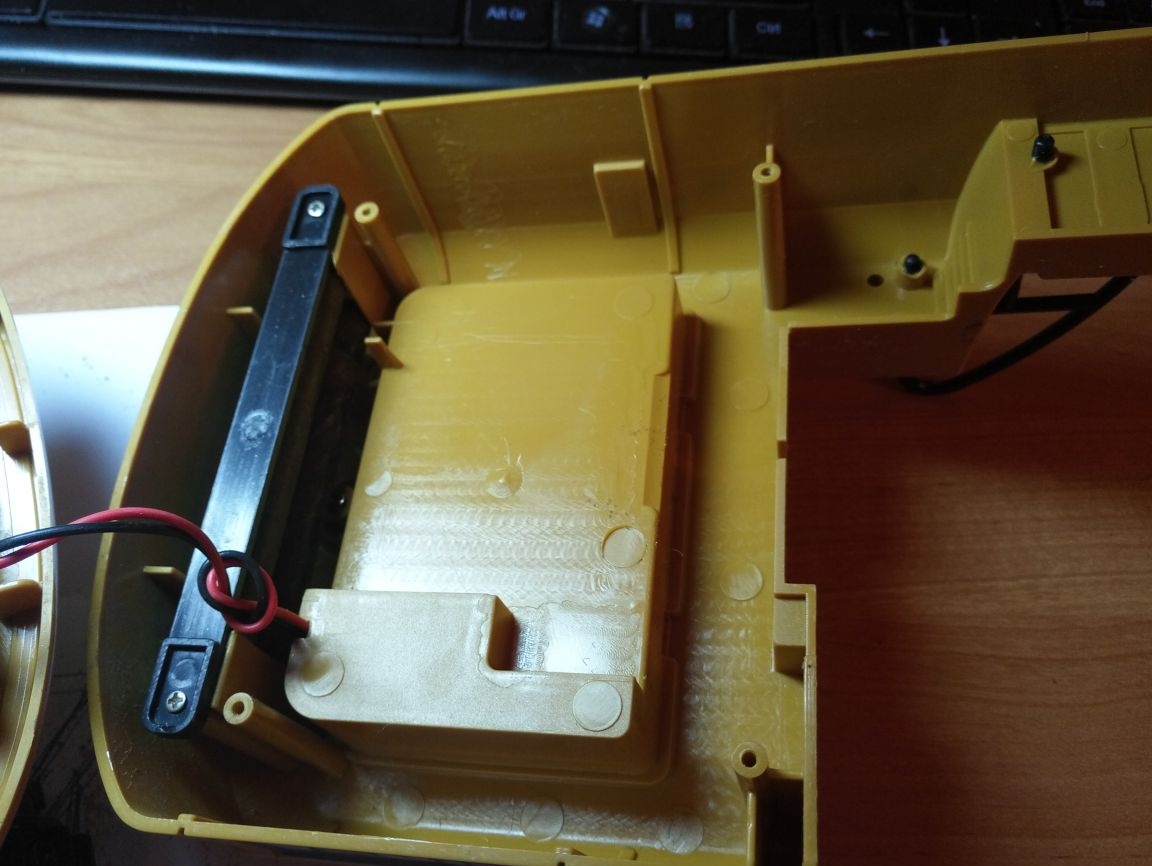
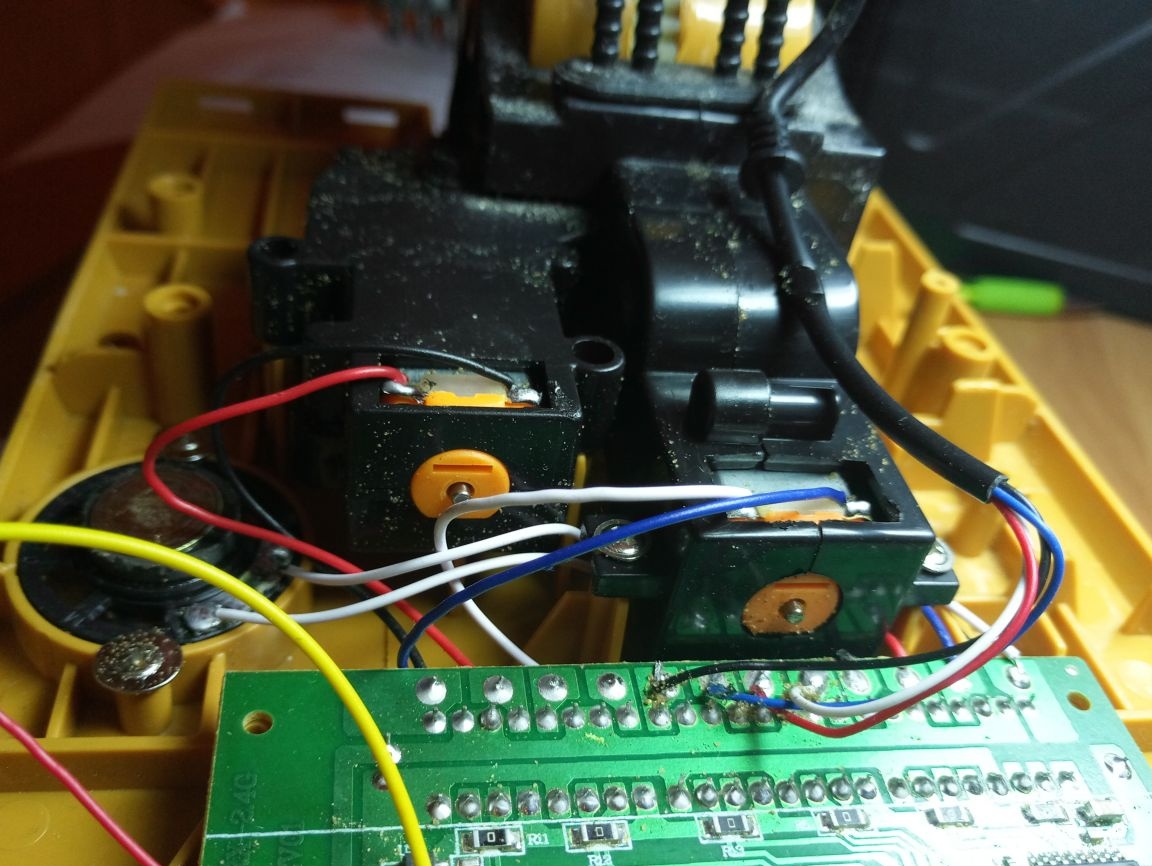
تم تفكيك الآليات نفسها فقط في الهيكل لم يصعد إلى السهم