

يوم جيد من عشاق اردوينو! عندما كانت معلقة في الإنترنت ، صادفت مقالة مسلية نوعًا ما حول كيفية صنع مناور يدوي يكرر حركات يد الشخص ، مستوحاة من البساطة والتأثير محلية الصنع قررت محلية الصنع لجمعها. لقد وجدت أجهزة استشعار الانحناء على Alliekspress من أجل جهاز الإرسال وتوفيت قليلاً ، ووقف شيء واحد في منطقة 15-20 دولارًا ، وتبين أن 5 أجهزة استشعار من هذا القبيل ليد واحدة فقط ستكلف 75-100 دولارًا وهذا فقط لأجهزة الاستشعار! بعد مرور بعض الوقت ، تعلمت كيفية صنع أجهزة الاستشعار هذه افعلها بنفسكوتبين أنها بسيطة ورخيصة للغاية.
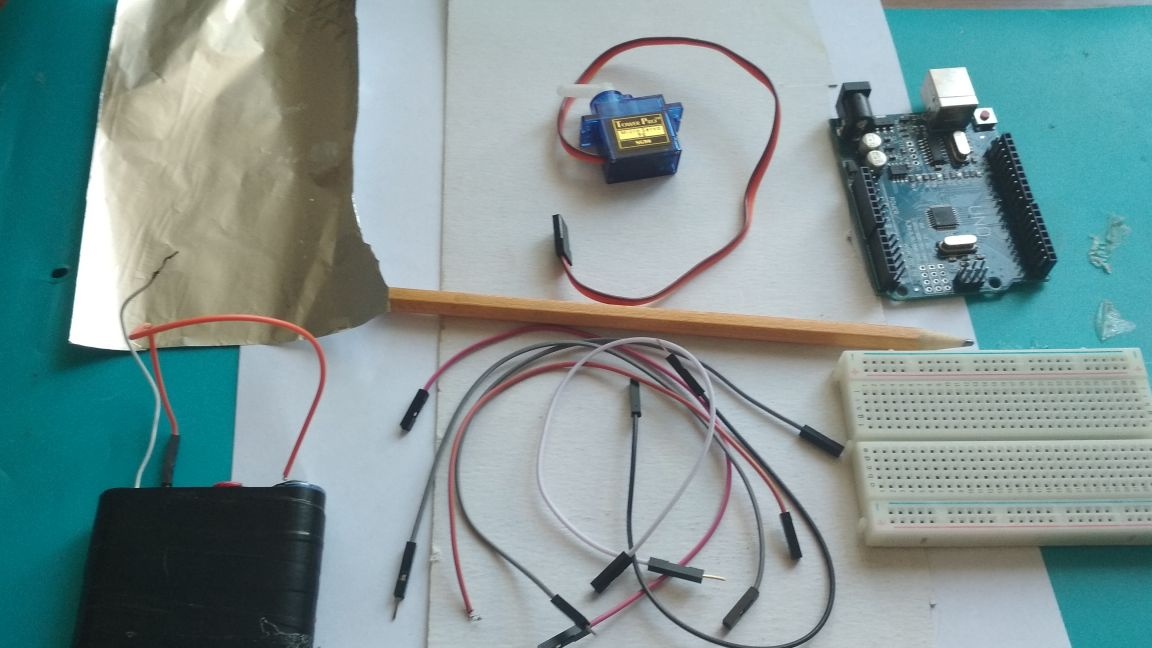
ولذا بالنسبة إلى مستشعر الانحناء ، نحتاج إلى:
الدفع اردوينو أونو ()
- لوحة قراءة
- توصيل الأسلاك مثل "الأب-الأم" أو "الأب-الأب"
- محرك
كرتون
ورقة
احباط
قلم رصاص
- مصدر طاقة من 6 إلى 12 فولت (أستخدم 4 بطاريات متصلة في سلسلة عند 1.5 فولت)
من الأدوات التي نحتاجها:
مسدس الغراء
مقص
وهكذا ، فإن أول شيء نقطعه من الورق المقوى هو شريطين أطول بمقدار 2 سم من إصبع السبابة وعرضه حوالي 1 سم:
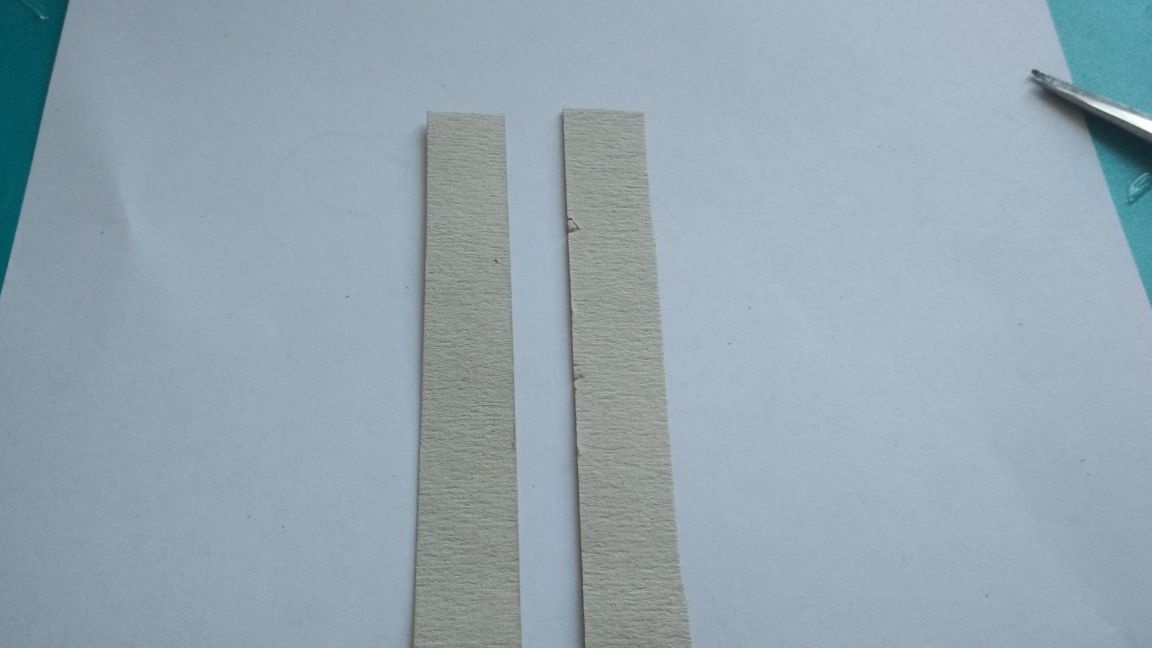

قص واحدة من نفس الشريط أقل بقليل:

ظل قلم الرصاص على جانبي الشريط الورقي على أفضل وجه ممكن:


قص شريطين من ورق أصغر من الورق:
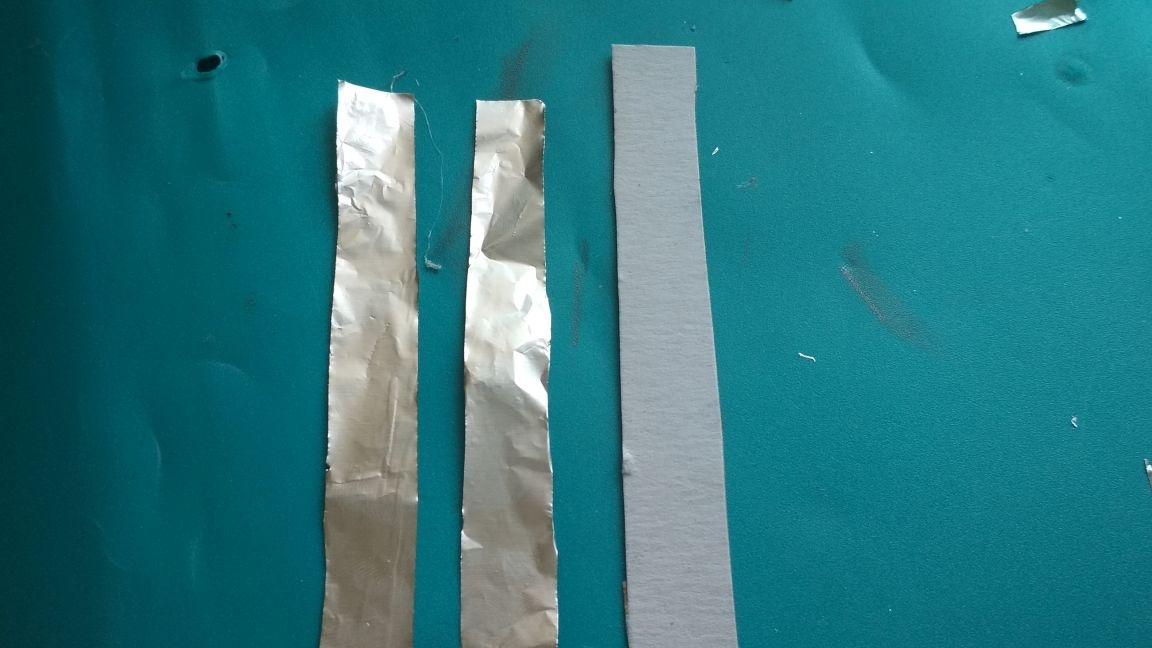
الصقها على شرائح الكرتون كما هو موضح في الصورة:

من الأسلاك المتصلة "الأب-الأم" نقطع مخرج "الأم" وننظف أطرافها من العزل:
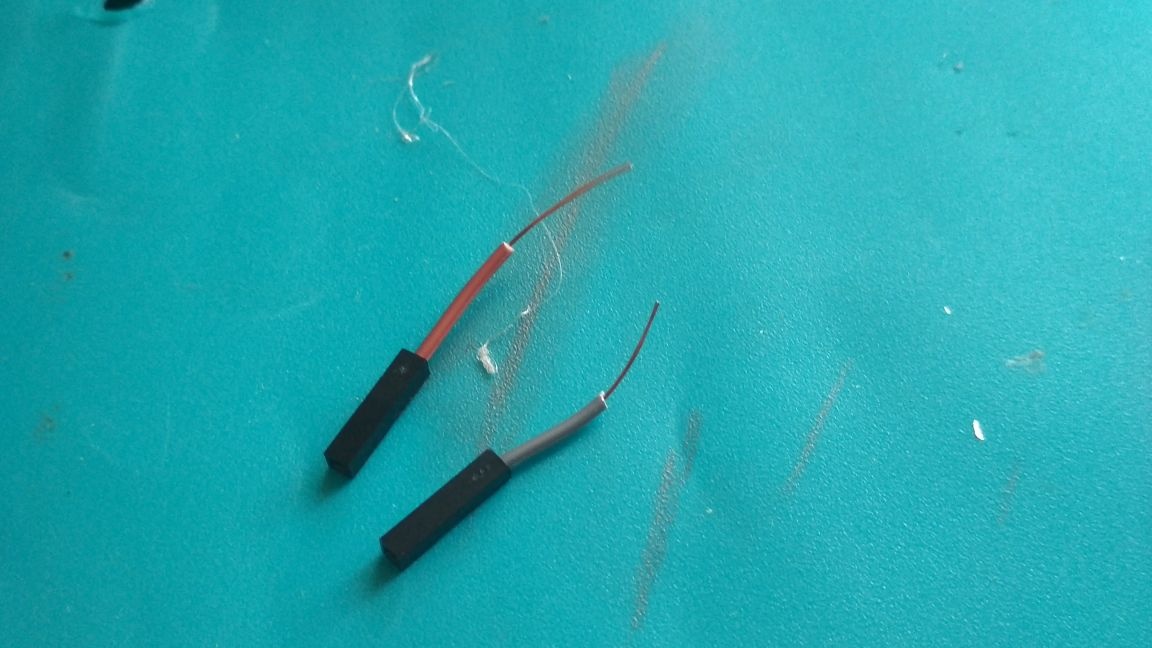
نعلق من الشريط أو اللحيم:

نعلق شريطًا ورقيًا على أحد الأنصاف ، بحيث يكون على اتصال بالرقائق ، ثم نغطي النصف الثاني من الجانب بالرقائق والضغط والصمغ على الجانبين:

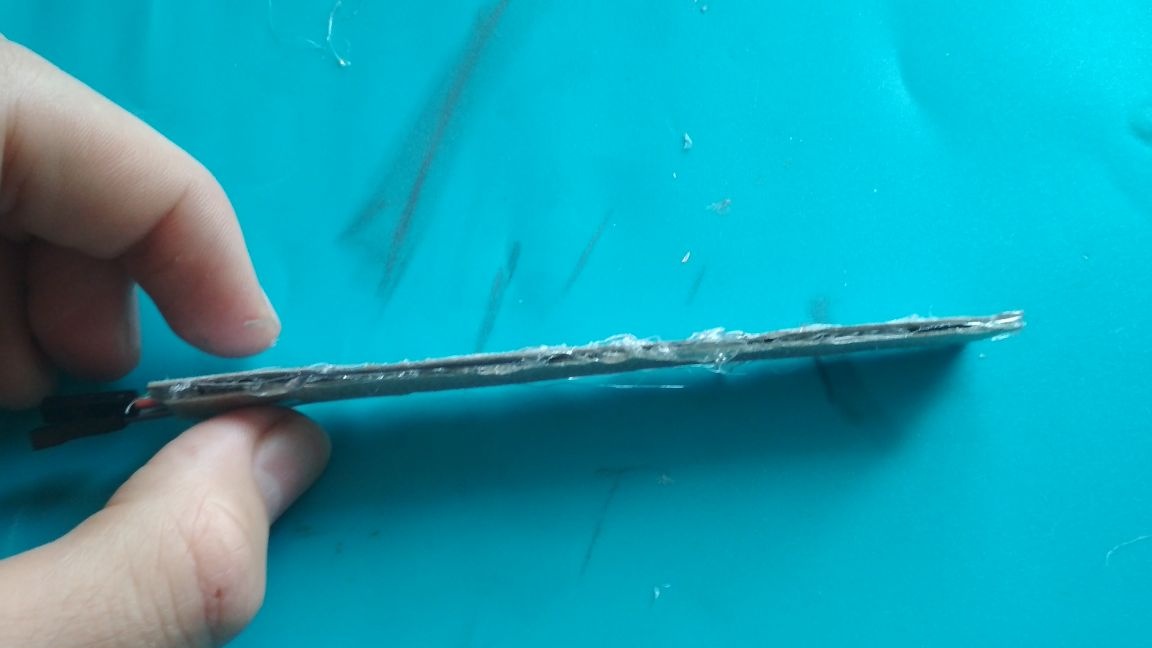

نحن نصنع مثل هذه "الثعابين" على كل جانب بمساعدة الغراء الساخن ، فهي ضرورية حتى يكون التصميم أكثر مرونة

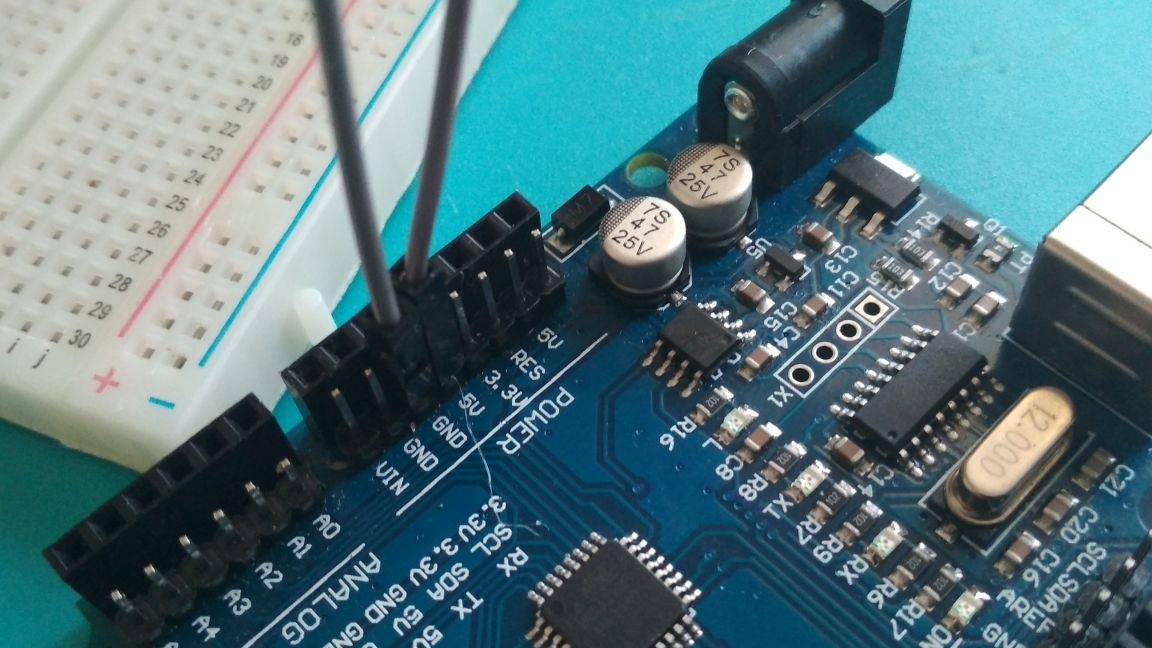
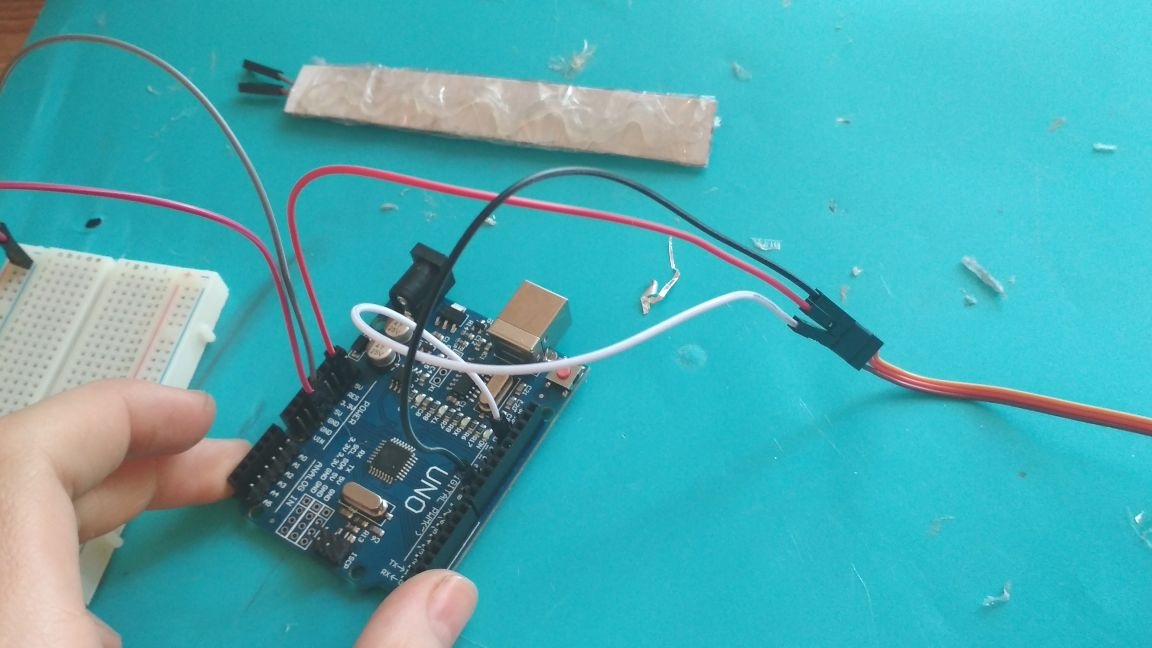
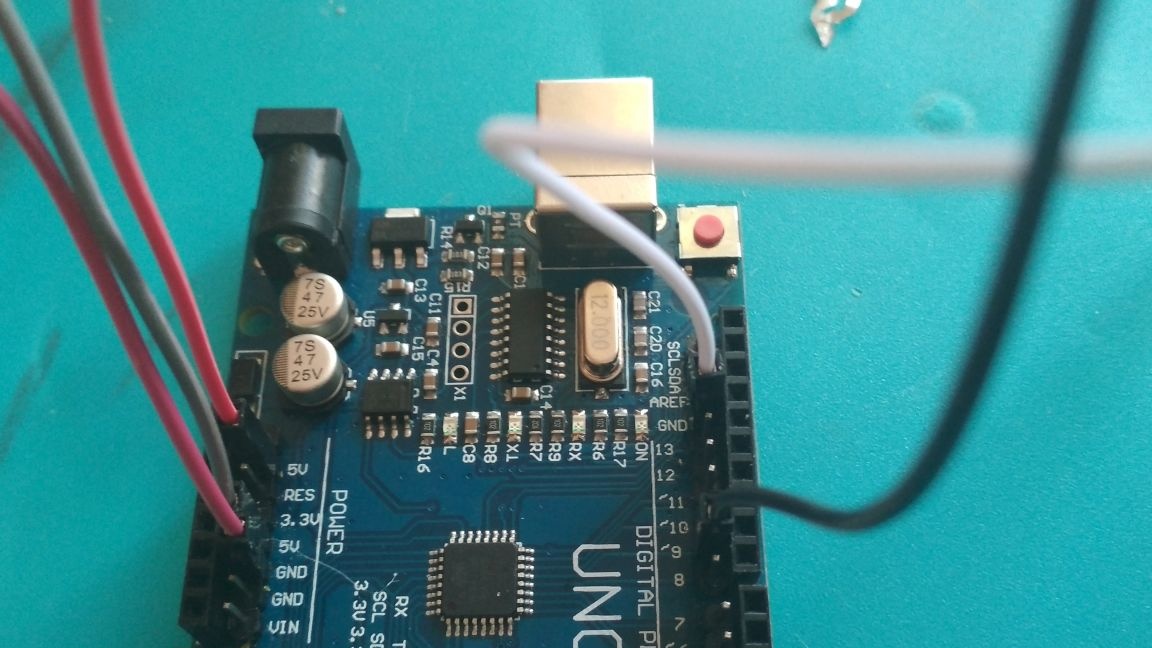
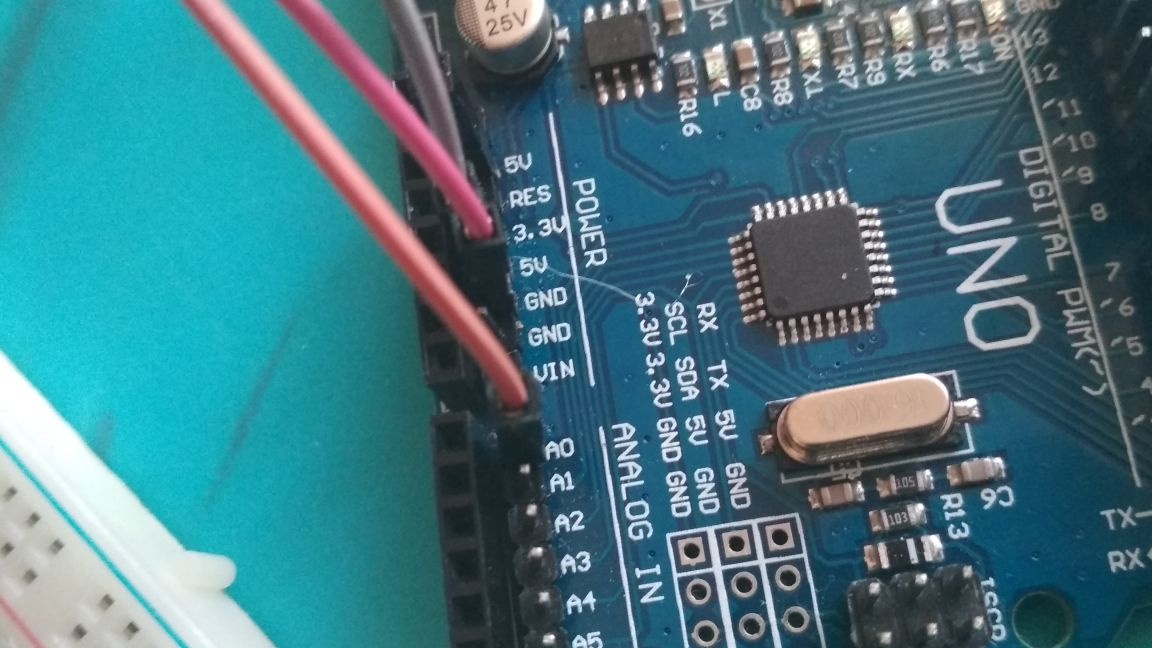
نأخذ اردوينو ونقوم بتوصيل خرج 5v مع زائد من اللوح ، و Gnd ناقص:

أضف أسلاك التوصيل إلى المحرك المؤازر وقم بتوصيلها بـ arduino على النحو التالي:
سلك بني ل gnd
الأحمر إلى 5V
البرتقالي إلى 9 دبوس
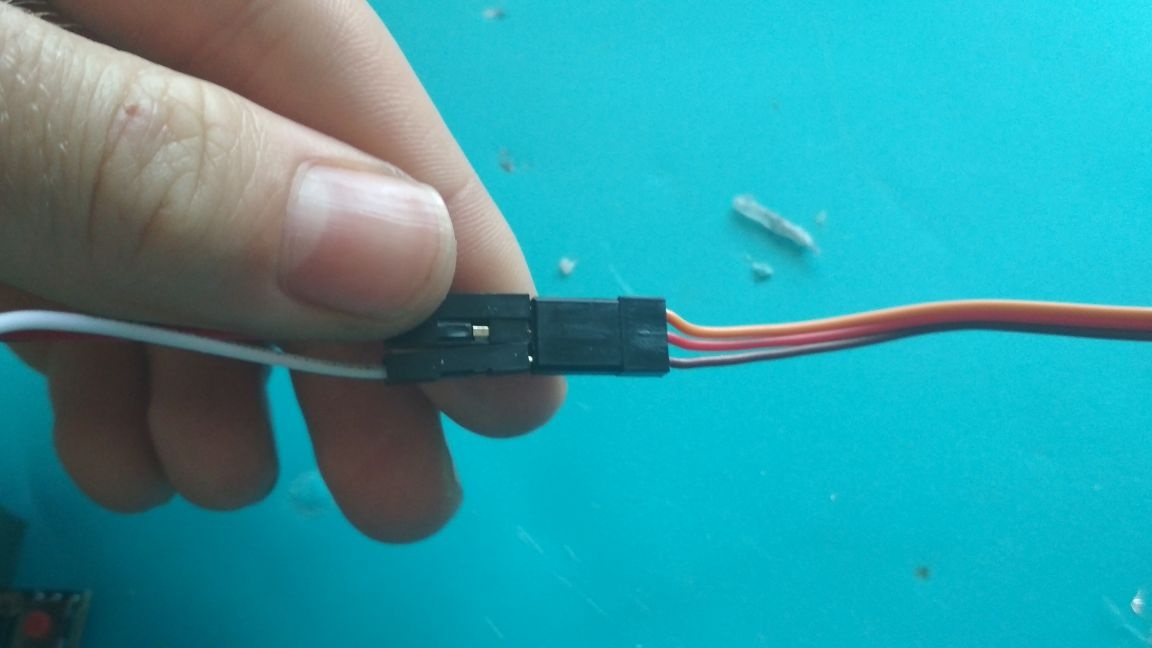
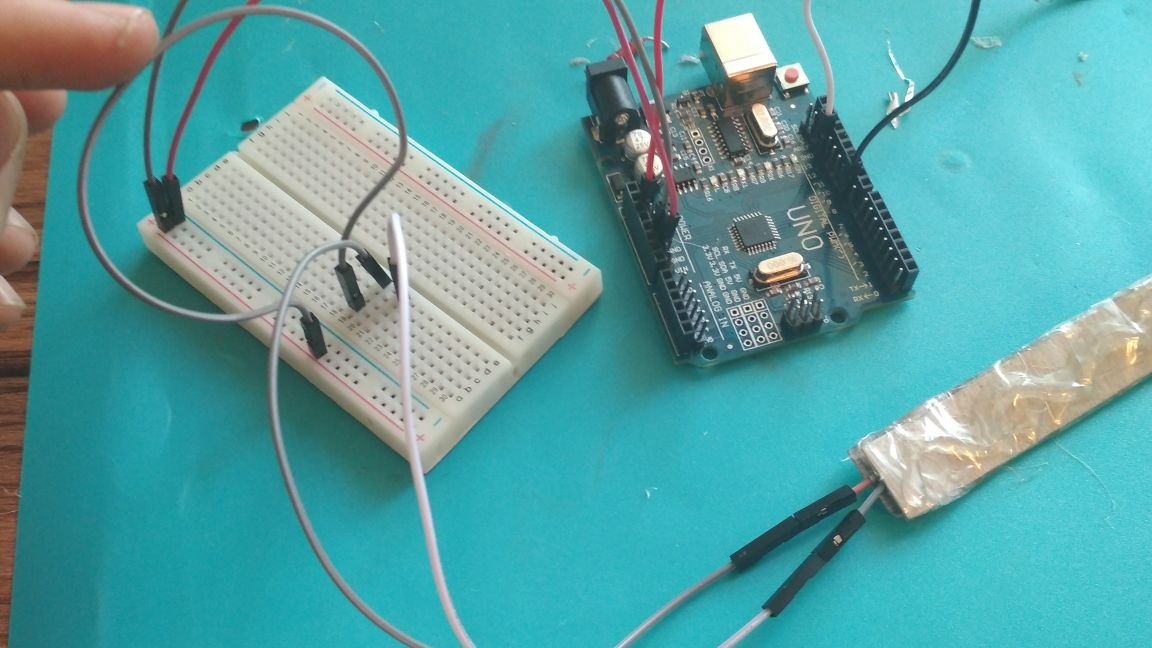
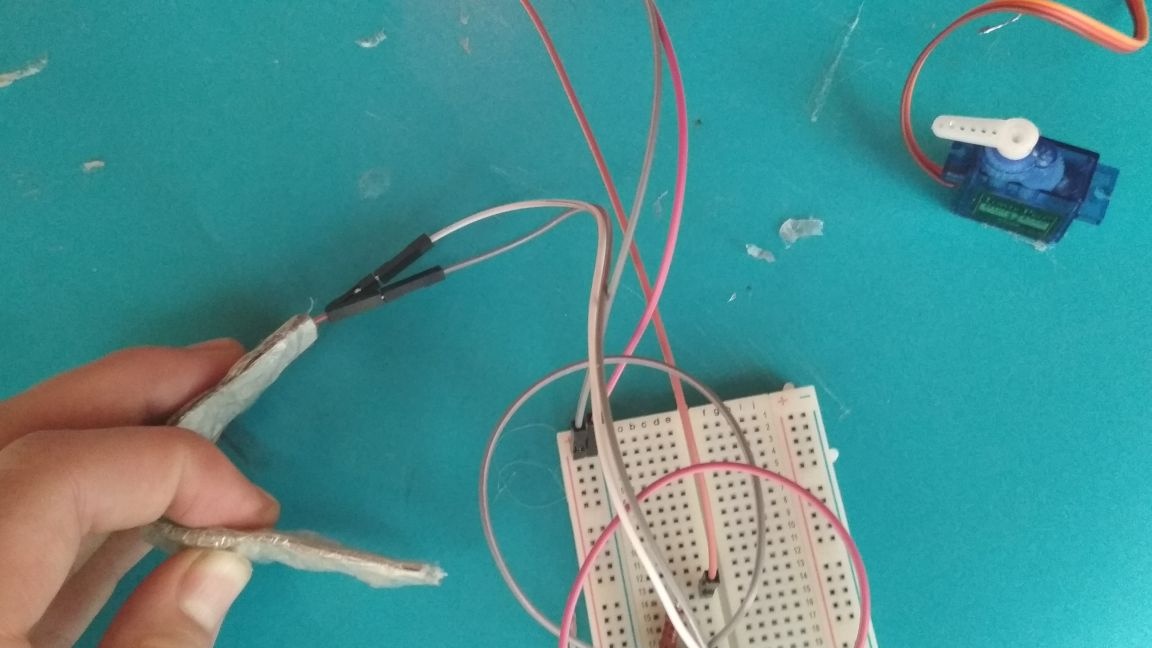
إلى مستشعر الانحناء لدينا ، أضف سلكين من أبي إلى أبي

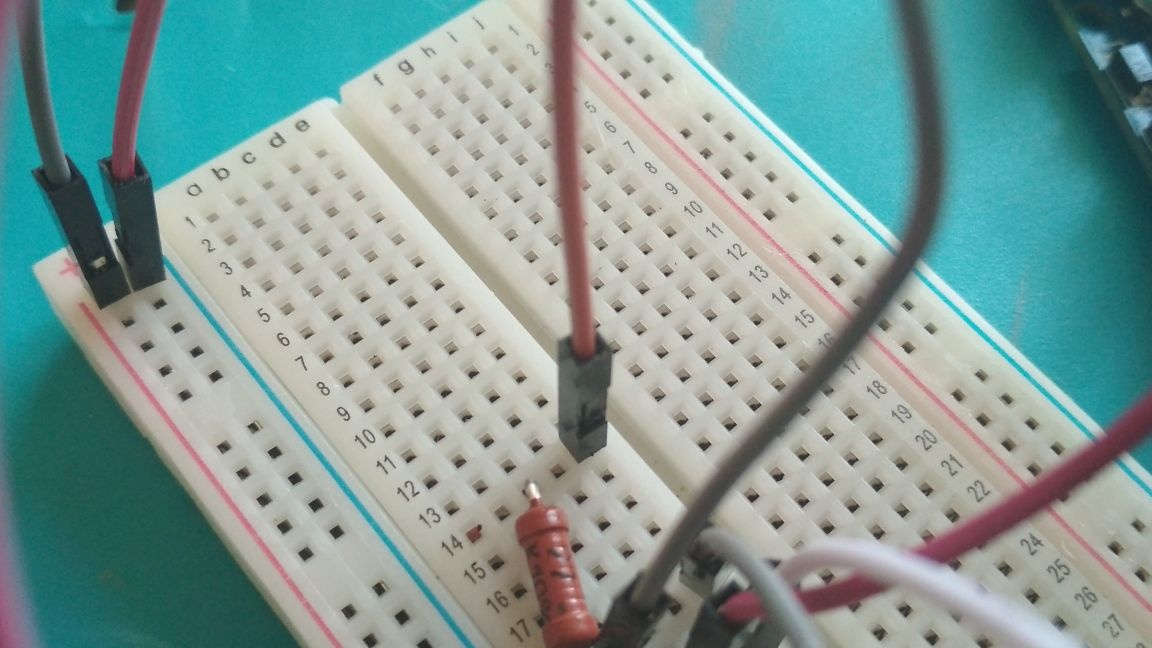
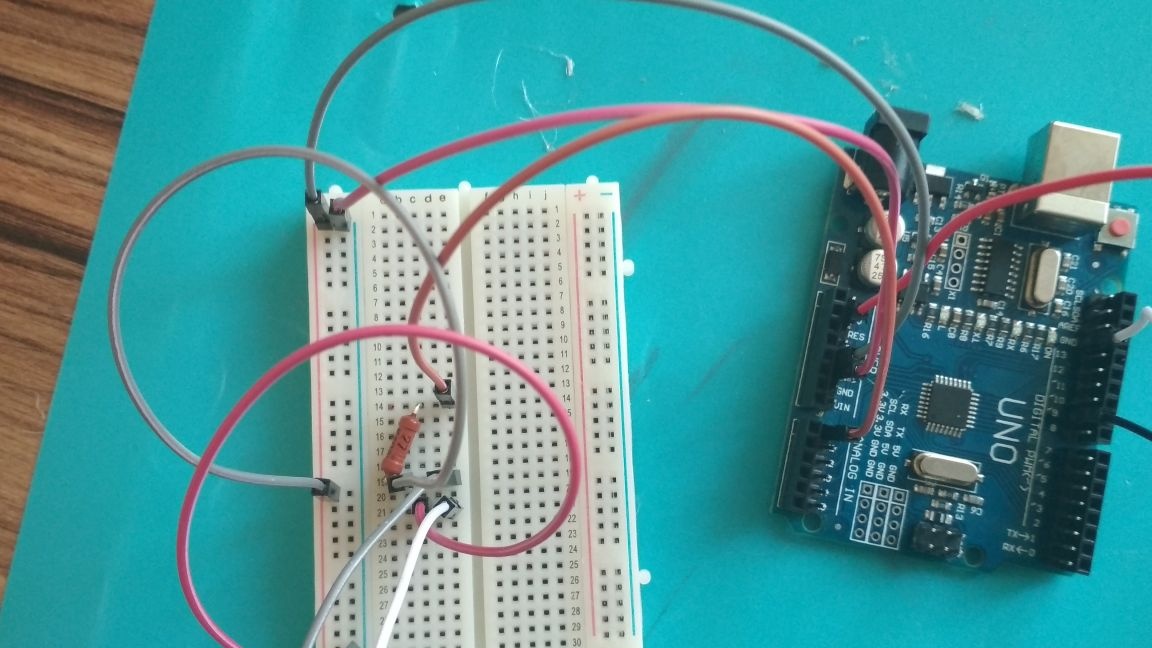
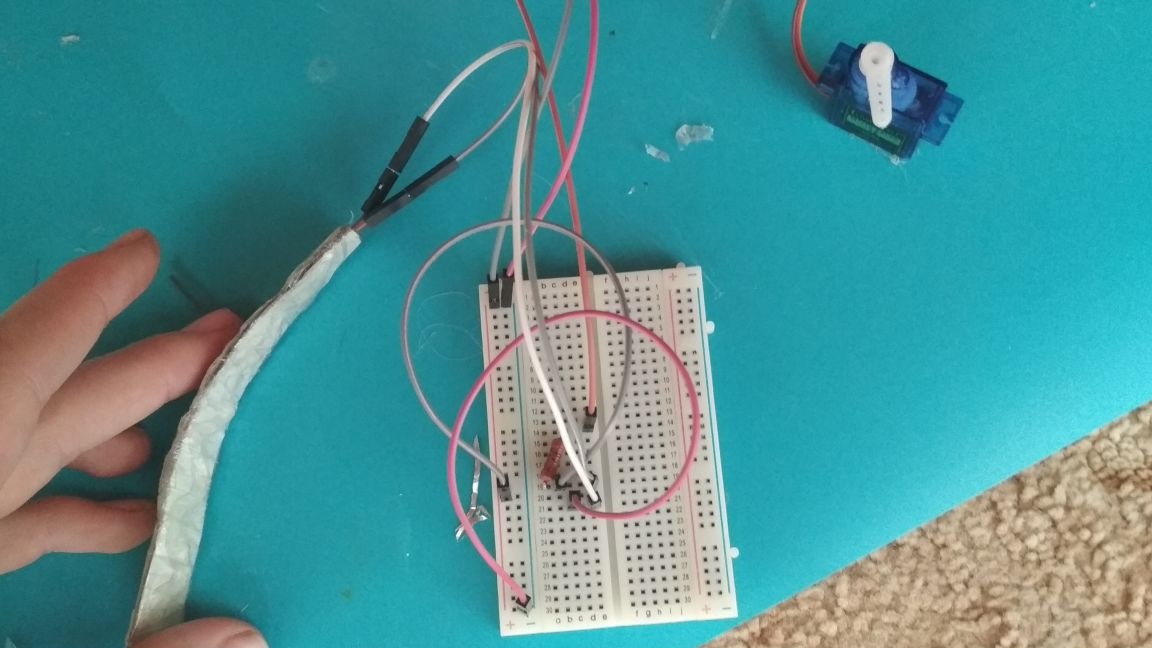
قم بتوصيلها باللوح:
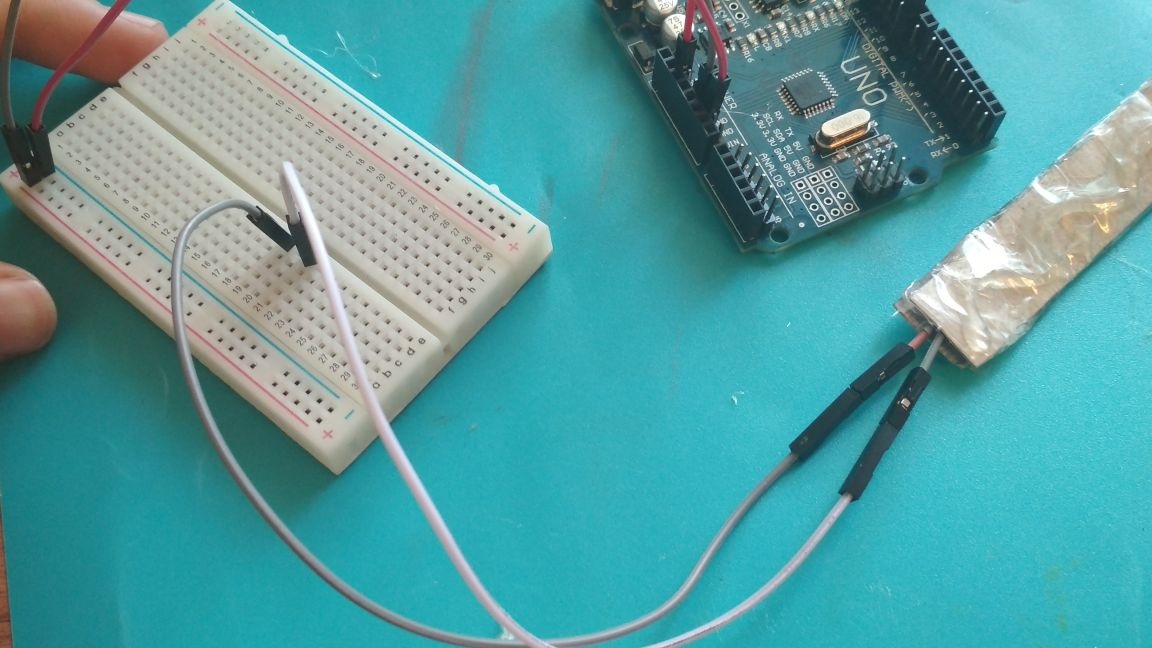
يتصل أحد طرفي المستشعر بلوحة اللوح من خلال مقاوم 22 كيلو أوم (لسوء الحظ ، قمت بخلطه وربطه بمخرج آخر ، لكن هذا لم يستجيب للتشغيل) ، والآخر إلى ناقص:
على خط الخبز هذا الذي توجد عليه نهاية المستشعر المتصل بالعلامة الإضافية ، أضف سلكًا آخر وأخرجه إلى الإخراج A0 على Arduino:
الآن نقوم بتوصيل Arduino بالكمبيوتر ، وبدء تشغيل Arduino IDE وتحميل الرسم التالي فيه:
# تشمل
مضاعفات سيرفو 1 ؛
const int flexpin = 0 ؛
إعداد باطل ()
{
Serial.begin (9600) ؛
servo1.attach (9) ؛
}}
حلقة فارغة ()
{
الانثناء int.
intopoposition.
flexposition = analogRead (flexpin) ؛
servoposition = map (flexposition، 1018، 1023، 0، 90) ؛
servoposition = التقييد (servoposition، 0، 90) ؛
servo1.write (servoposition) ؛
Serial.print ("sensor:") ؛
Serial.print (flexposition) ؛
Serial.print ("servo:") ؛
Serial.println (مؤازرة) ؛
تأخير (1000) ؛
}}قم بتشغيل شاشة المنفذ التي يتصل بها Arduino وقم بتحميل الرسم

الآن نلاحظ التغييرات التي تحدث في شاشة المنفذ عندما ينحني المستشعر ، نرى أن 1023 هي 90 درجة ، و 1020 و 1019 هي 0 ، لذا في حالتي ، أقوم بتغيير الرقم 1018 في الرسم إلى 1020 ، يمكنك الحصول على واحد مختلف. الآن 1020 هي 0 درجة ، و 1023 هي 90 درجة. بعد كل التغييرات ، قم بتحميل الرسم المخصص الجديد إلى لوحة Arduino


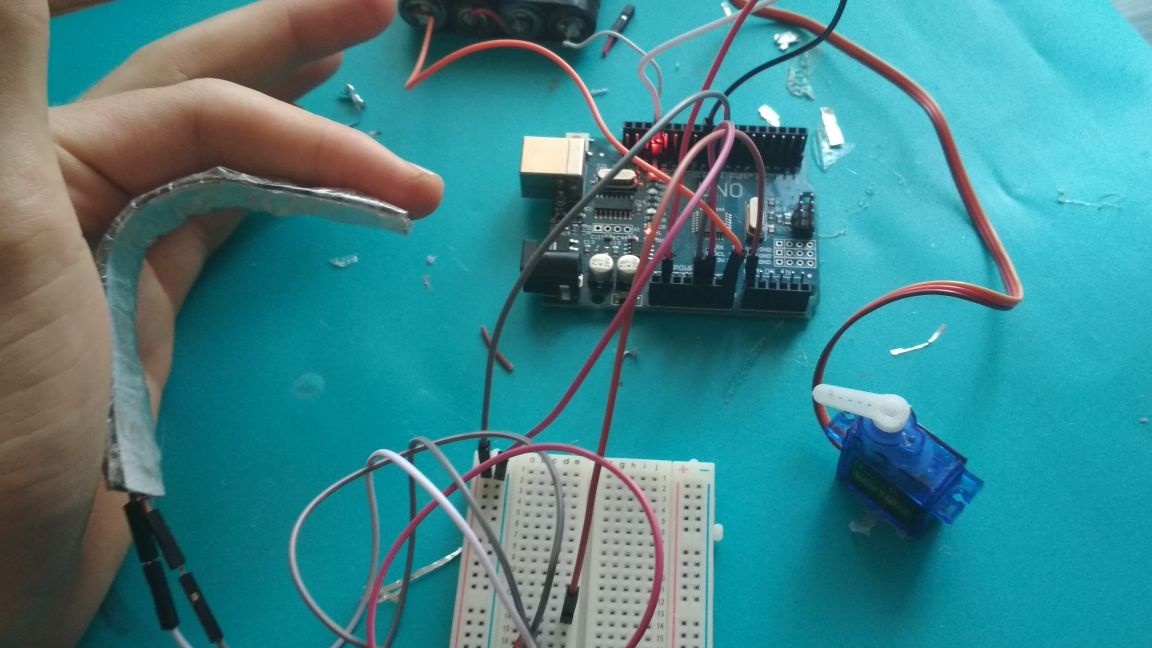
حسنًا ، هذا كل شيء! مستشعر الانحناء الأبسط والأهم من ذلك هو جاهز!
إذا تم عمل كل شيء بشكل صحيح ، عندما يكون المستشعر منحنيًا ، فإن محرك سيرفو سوف يتحول 90 درجة ، وعند تمديده ، سيعود إلى موضعه الأصلي. بالطبع ، دقة هذا المستشعر أقل من المستشعر الذي تم شراؤه ، ولكنه مناسب للمشاريع التي لا يتم الخلط بينها بشكل خاص ، بالإضافة إلى ذلك ، إذا قمت بكل شيء بعناية وضبطه ، فسيظهر عند شرائه تقريبًا. آمل أن تكون هذه المقالة مفيدة لشخص ما.
شكرا لكم جميعا على اهتمامكم!