


يوم جيد للجميع! في هذه المقالة أود أن أقول كيف تستخدم اردوينومجموعة من المصابيح ومستشعر الموجات فوق الصوتية ، يمكنك تجميع جهاز يحدد المسافة من المراقب إلى الجسم ، وبعبارة أخرى ، محدد المدى. وهكذا دعونا نذهب!
ماذا نحتاج:
سهل مربع. من المستحسن أن تكون صغيرة الحجم ، لأنها ستحتوي على متحكم واحد فقط.
باستخدام محول بالموجات فوق الصوتية HC-SR04 يمكننا تحديد المسافة.

مؤشر مكون من أربعة أرقام نحن بحاجة إلى إخراج القيم التي تم الحصول عليها.

تعيين المصابيح أي ألوان (لقد استخدمت اللون الأخضر ، لأنها أكثر إشراقًا) ، المقاومات عند 220 أوم الأسلاك أو صداري أيضًا اللوح.

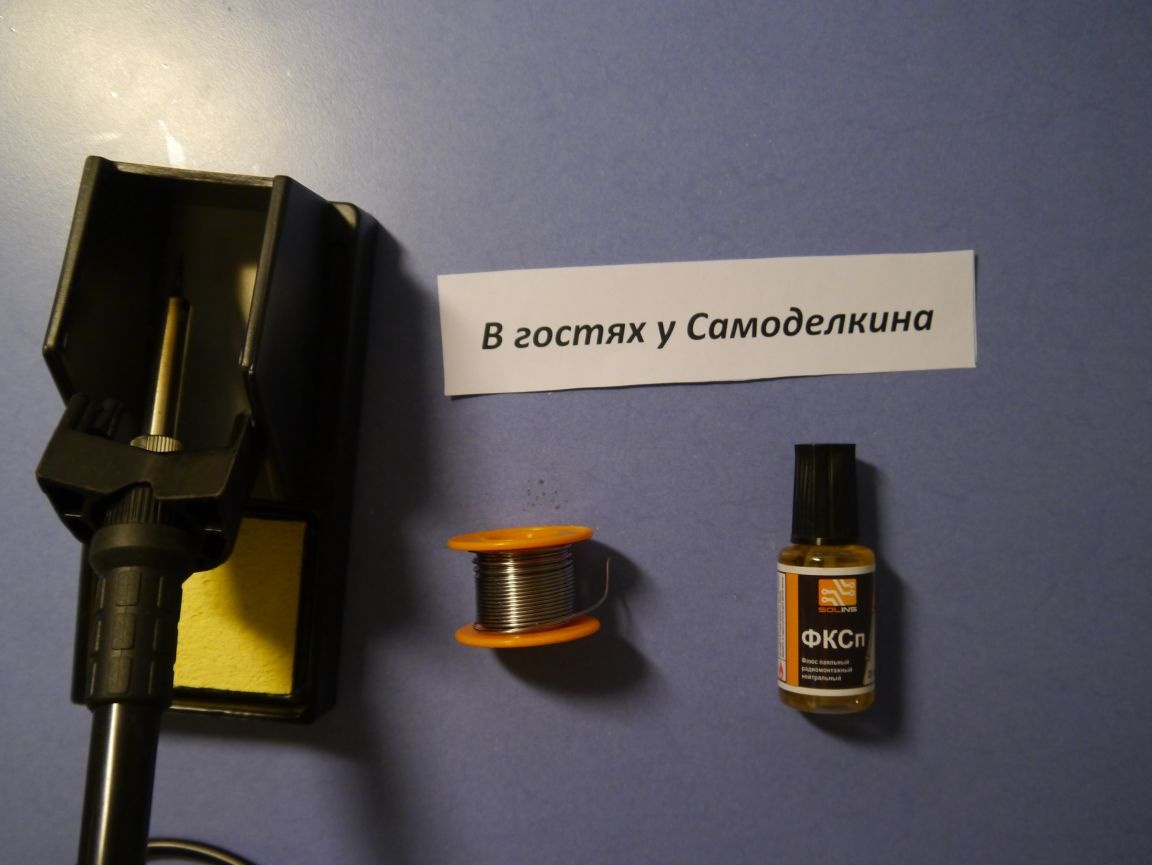
حتى يتم تثبيت مكونات الجهاز بشكل آمن ، سأقوم بحامها.
لهذا نحن بحاجة لحام الحديد ، الجريان ، اللحيمكذلك اللوح للحام.
وبالطبع بدون اردوينو لا يمكننا أن نفعل! (يمكنك اختيار أي متحكم ، فضلت Arduino Leonardo أو ما يعادله Iskra Neo)

من الأدوات التي نحتاجها مكواة لحام ، كما قلت أعلاه ، السكين والقصوص.
لنبدأ الآن في تجميع الجهاز.
الخطوة رقم 1
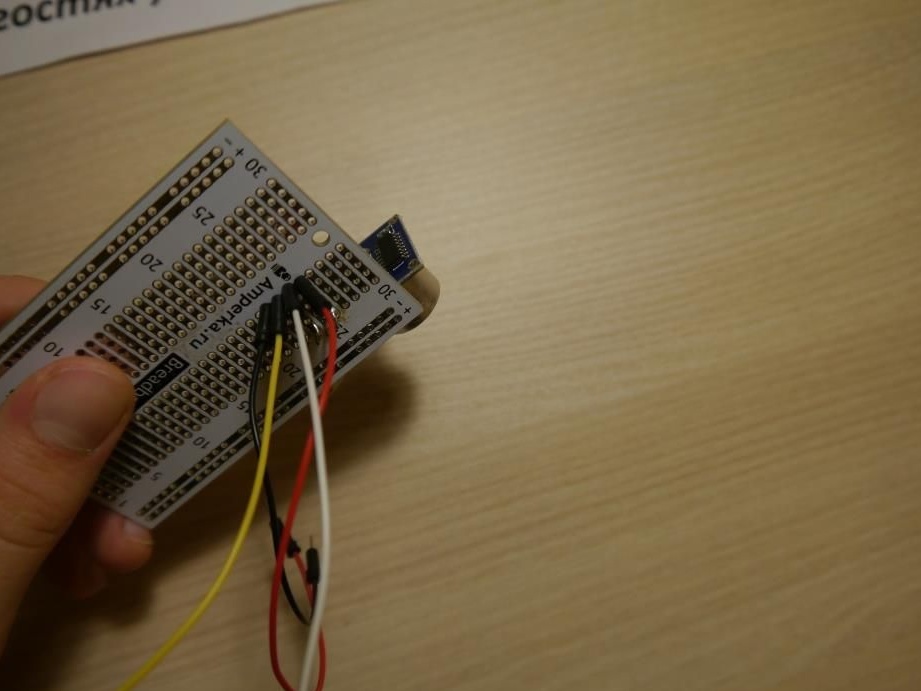
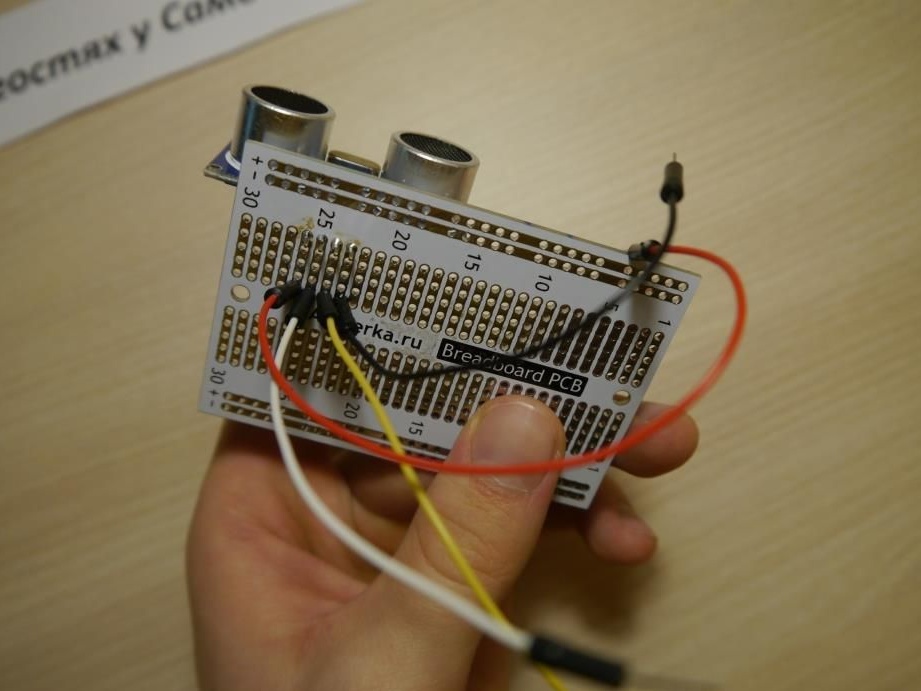
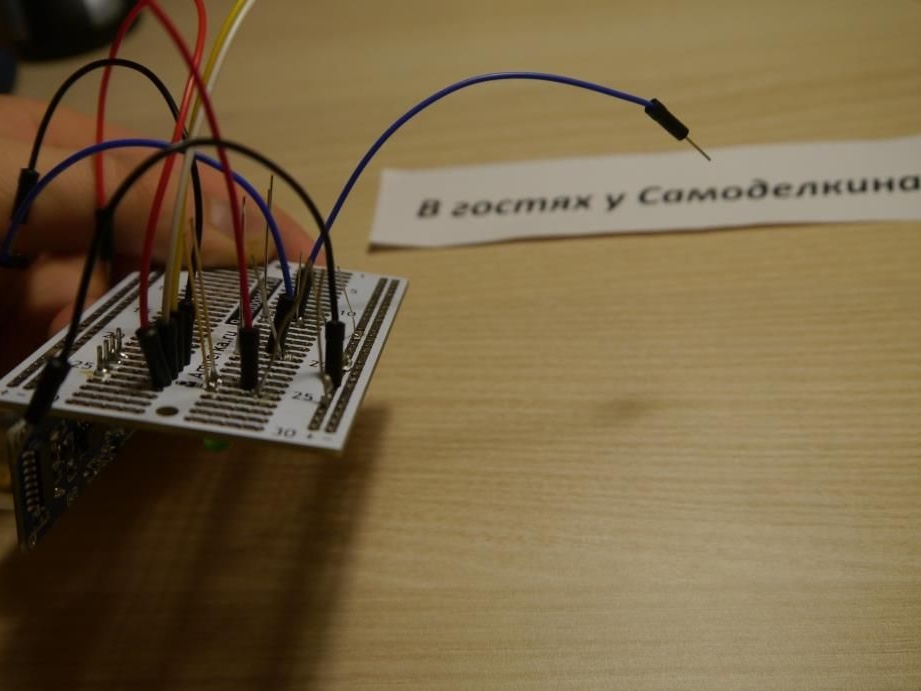
للبدء ، باستخدام لوحة توصيل ، سنقوم بتجميع نموذج أولي لجهازنا المستقبلي. سيبدو شيء من هذا القبيل ..

لا تقلق! لا يوجد شيء رهيب في فوضى الأسلاك هذه!
يحتوي مستشعر HC-SR04 على أربعة دبابيس: زائد وناقص (الذي نلتزم به في 5V و GND لوحدة التحكم) و Trig و Echo (نقوم بإدراج دبابيس arduino في 12 و 11 على التوالي)
يحتوي المؤشر المكون من أربعة أرقام على 3 أسلاك: الطاقة والأرض والإشارة. هذا الأخير متصل بـ 9 دبوس Arduino.
نقوم بتوصيل ثلاثة مصابيح LED إلى 6 و 5 و 4 جهات اتصال لوحدة التحكم في سلسلة مع المقاومات. لا تنسى القطبية. يتدفق التيار من ساق أطول إلى ساق أقصر.
هذا كل شيء ، عندما قمنا بتجميع جهازنا على لوحة توصيل ، وقمنا بتحميل الرسم (سيكون في نهاية المقالة) وتأكدنا من أن كل شيء يعمل ، لا تتردد في بدء اللحام.
الخطوة رقم 2
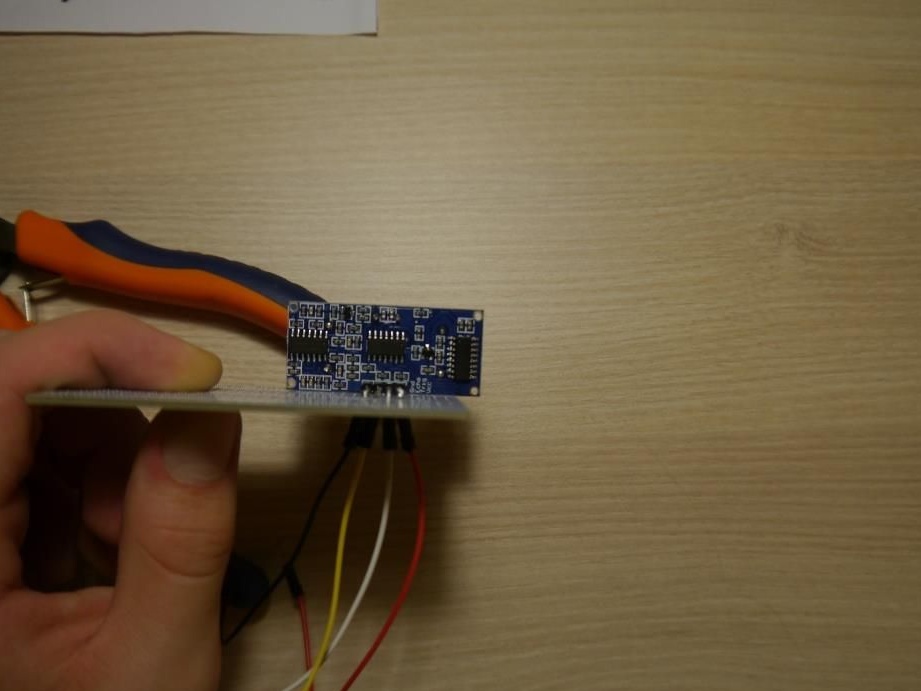
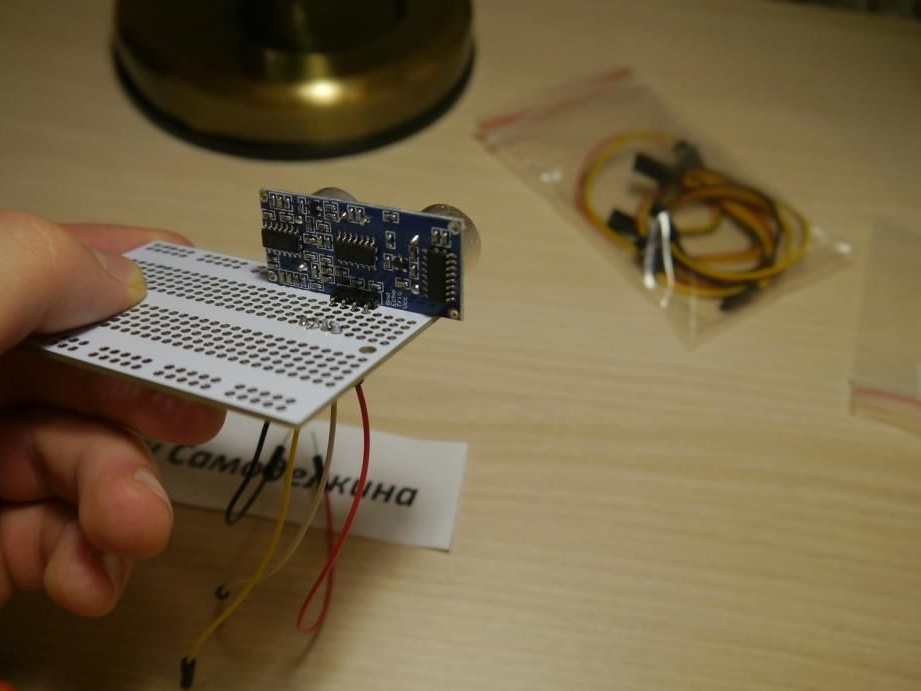
أولاً ، قم بلحام المستشعر فوق الصوتي على لوحة التوصيل. لقد استخدمت لوحة توصيل صغيرة الحجم ، حيث لا يتجاوز عدد العناصر 7.

بعد ذلك ، بمساعدة القواطع ، قم بقضم الساقين (أعتذر عن الحشو) ، مما يجعلها أقصر حتى لا تتدخل وتبدو أجمل!

بعد ذلك ، قم بلحام الأسلاك الأربعة مقابل جهات اتصال المستشعر.
أيضا لا تنسى كماشة!
الخطوة رقم 3
المستشعر في مكانه ، ويبقى لحام المصابيح الثلاثة مع المقاومات.
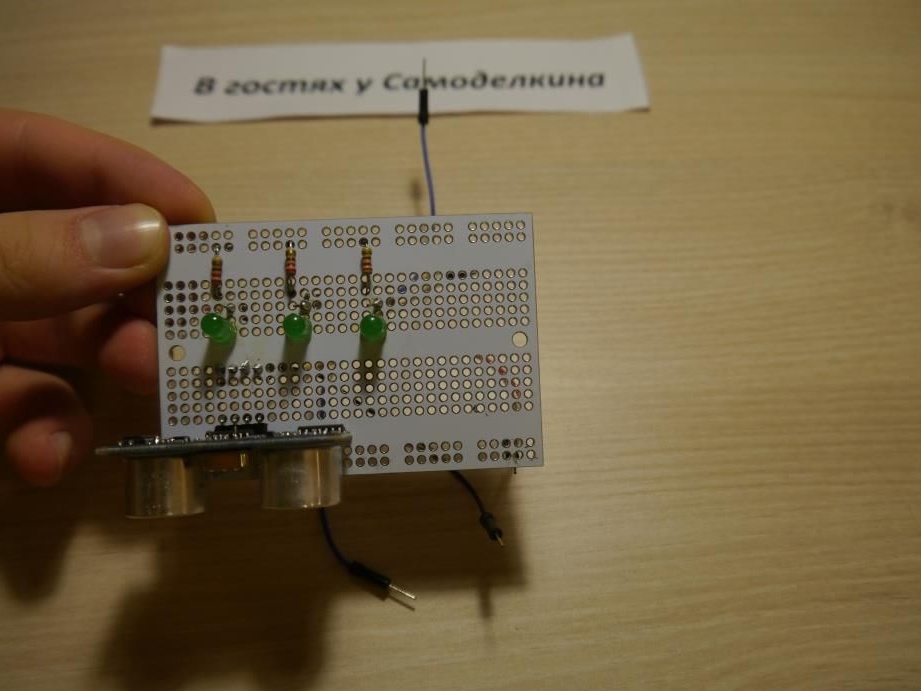
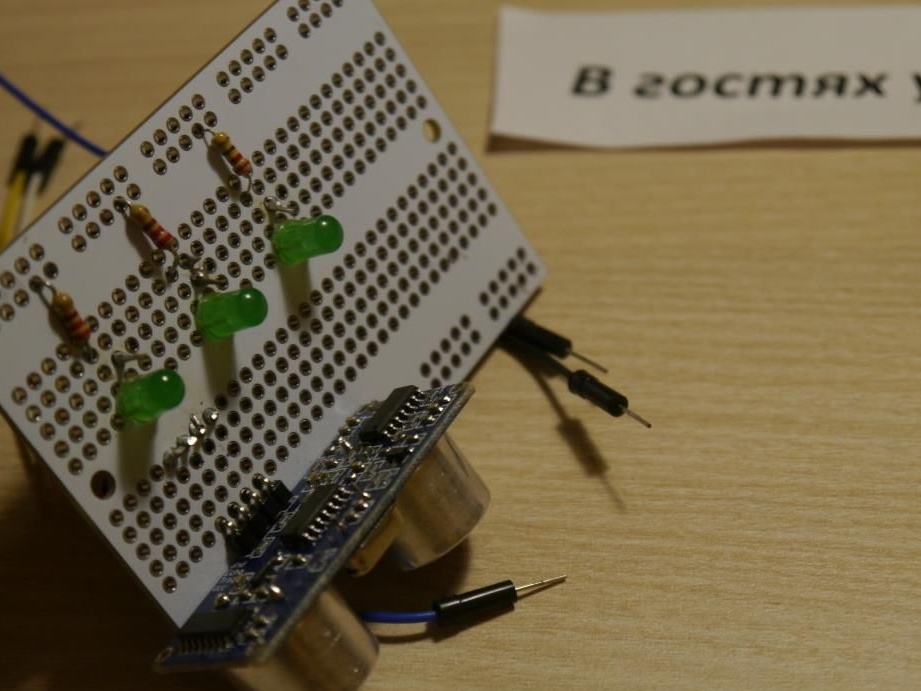
على الجانب العكسي ، يبدو هذا:
الخطوة رقم 4
على جانب الصندوق ، اقطع فتحة مستديرة للطعام.

على الغطاء ، تحتاج إلى قطع تجويف إلى حجم (أصغر قليلاً في الطول) من اللوح ، وكذلك حفر ثقوب للبراغي.


الآن ، إذا قمنا بلف اللوح الفارغ بدون عناصر عليه (فعلت ذلك فقط للتوضيح ..) ، نحصل على شيء مثل ما يلي:

الخطوة رقم 5
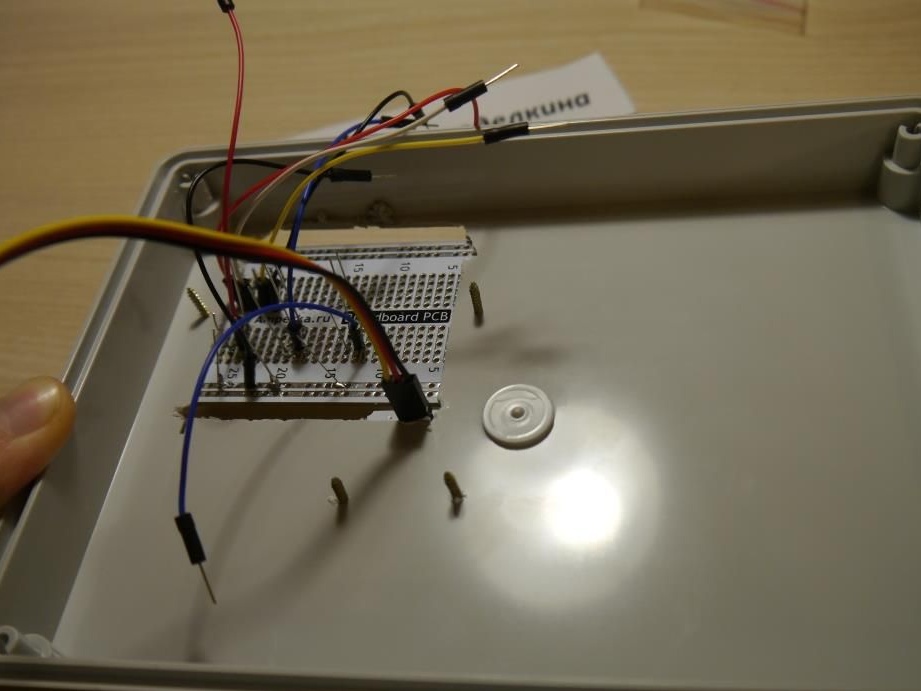
لذلك ، لجعلها أكثر ملاءمة ، أقترح أولاً توصيل الأسلاك بـ arduino ، ثم فقط ثمل اللوح بغطاء الصندوق. أيضًا ، لا تنس المؤشر الذي وضعناه فوق التخطيط.



انتهى كل شيء في تجميع الجهاز هذا!
يبقى فقط لتنزيل التالي رسم واستمتع باللعبة!
# تشمل
# تشمل
NewPing Sonar (12.11 ، 400) ؛
int أ ، ي ، ب ؛
طويلة غير موقعة t = 0 ؛
int masiv [] = {1،0،0،0،1،0،0،0،1} ؛
إعداد باطل ()
{
for (int i = 4؛ i & lt؛ 7؛ i ++)
{
pinMode (i، OUTPUT) ؛
}}
مسح (9) ؛
for (int i = 4؛ i & lt؛ 7؛ i ++)
{
الكتابة الرقمية (i ، 0) ؛
}}
}}
حلقة فارغة ()
{
ي = 7 ؛
لـ (int i = 0؛ i100) نغمة (2،70) ؛
الكتابة الرقمية (j، masiv [i]) ؛
بينما (millis () & lt؛ = t + b)
{
تأخير (50) ؛
أ = sonar.ping_cm () ؛
displayInt (9 ، أ) ؛
ب = أ ؛
}}
t = ملي () ؛
إذا (j == 4) j = 7 ؛
إذا (i == 8)
{
الكتابة الرقمية (4.1) ؛
بينما (millis () & lt؛ = (t + b) + (b * 2))
{
تأخير (50) ؛
أ = sonar.ping_cm () ؛
displayInt (9 ، أ) ؛
ب = أ ؛
}}
الكتابة الرقمية (4.0) ؛
t = ملي () ؛
}}
}}
بضع كلمات كود البرنامج. بفضله ، ستومض مصابيح LED الثلاثة بالتناوب واحدة تلو الأخرى ، وستعتمد سرعة الوميض على المسافة إلى الجسم الذي يحسبه جهاز الاستشعار بالموجات فوق الصوتية. ولكن من أجل جعل مصابيح LED تومض ، فليس من المنطقي تمامًا استخدام وظيفة delay () ، لأنه عند استخدامها ، تتجمد وحدة التحكم ولا يتم إجراء أي حسابات. هناك عدة طرق لحل هذه المشكلة. على وجه الخصوص ، أحدها هو استخدام الدالة millis () ، والتي تُرجع رقمًا بالمللي ثانية من لحظة عمل وحدة التحكم. وكيف نؤخر 100 ملي ثانية مشروطة؟ للقيام بذلك ، قمت بإنشاء دورة فارغة في الأساس ، لن يكون الخروج منها إلا بعد مرور 100 مللي ثانية ، ثم يواصل البرنامج تشغيل / إيقاف مصابيح LED.
حسنا هذا كل شيء! شكرا لقراءة هذا المقال حتى النهاية. آمل ألا تكون قد أحببتها فحسب ، بل ألهمت أيضًا بحرًا جديدًا الحرف والاختراعات!