
لقد قمت مؤخرًا ببناء العشرات من الروبوتات ، المستوحاة في الغالب من عجائب الروبوتات BEAM. إذا لم تكن على دراية بهذه التقنية ، فإن BEAM هي طريقة خاصة لبناء الروبوتات مع التركيز B - علم الأحياء ، E - الإلكترونيات (إلكترونيات) ، و- جماليات (جماليات) ، وميكانيكا (ميكانيكا). هذا هو اختصار BEAM. ما يفصل هذه التكنولوجيا عن الأساليب الأخرى هو استخدام الطاقة الإشعاعية فقط للتغذية (الطاقة الشمسية بشكل رئيسي) ، والتخلص من المواد المختلفة (إعادة الاستخدام) والبساطة. على الرغم من أنني اعتمدت هذه المبادئ ، بلدي الروبوتات لم تكن في روح BEAM (كانت تعمل بالبطارية).
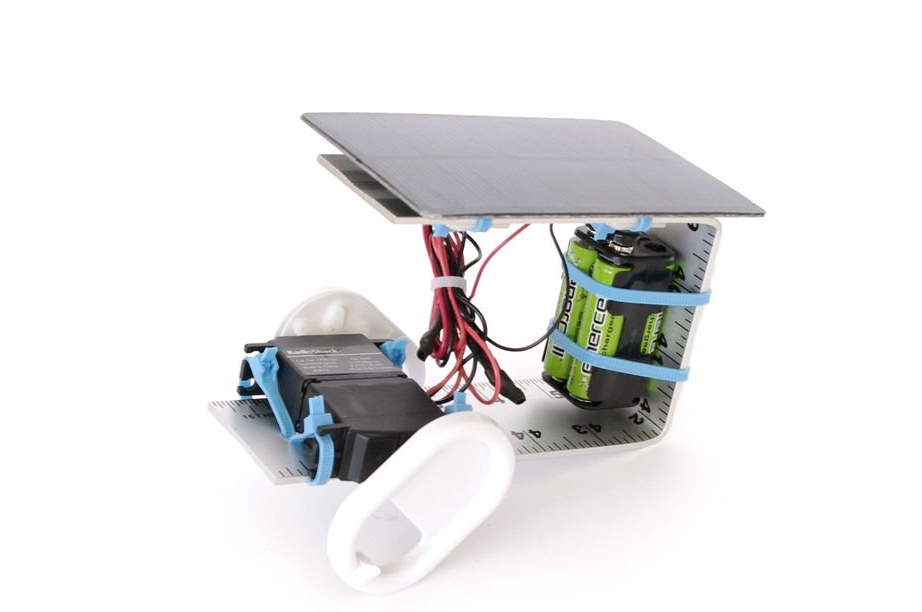
منذ أن ألهمتني BEAM الروبوتات بجدية ، أردت أن أصنع روبوتًا يعمل بالطاقة الشمسية. ولكن بدلاً من مجرد صنع روبوت BEAM ، قررت دمج لوحة شمسية في الروبوت بأسلوبي المعتاد. بدلاً من تشغيل الشمس بالكامل ، قررت إنشاء بطاريات قابلة للشحن. أي ، يمكن تشغيل روبوتي إما من بطارية أو من لوحة شمسية ، اعتمادًا على مصدر الطاقة الأكثر قوة حاليًا. تقوم اللوحة الشمسية أيضًا بشحن البطاريات عندما يضربها ضوء الشمس. وهذا يسمح للروبوت بالتحرك في الضوء وفي الظل.
أعتقد أن هذا النهج يجمع بنجاح بين نمطين ، وهذه تجربة مثيرة للاهتمام في بناء الروبوتات.
الخطوة 1: المواد
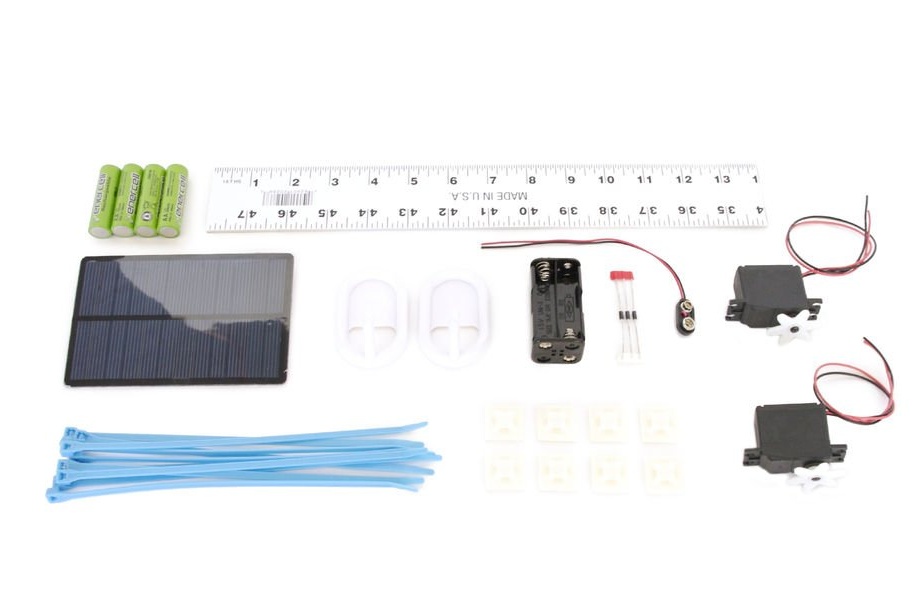
ستحتاج إلى:
(X1) الألواح الشمسية
(2) المحركات المؤازرة القياسية
(x3) Schottky Diodes 1N5817 - مكافئ NTE578
(X1) بطارية 9V
(x8) بطاريات AA قابلة للشحن
(x1) حزمة بطارية 8 x AA
(x12) قاعدة المشابك
(x1) مسطرة (30 - 50 سم)
(2) خطافات لاصقة مثبتة على الحائط
(x1) المشابك البلاستيكية
(x1) أنابيب الانكماش الحراري
الخطوة 2: تعديل الماكينة

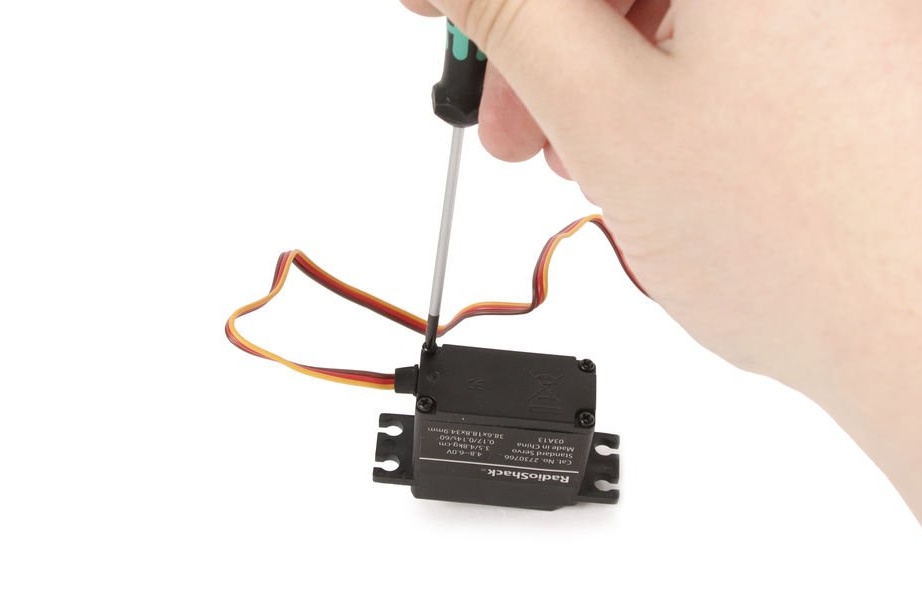
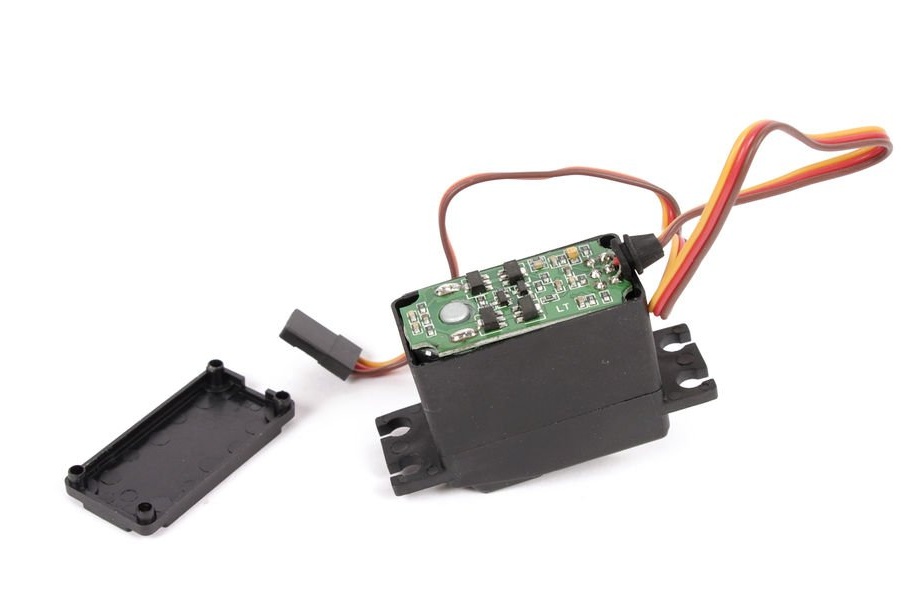
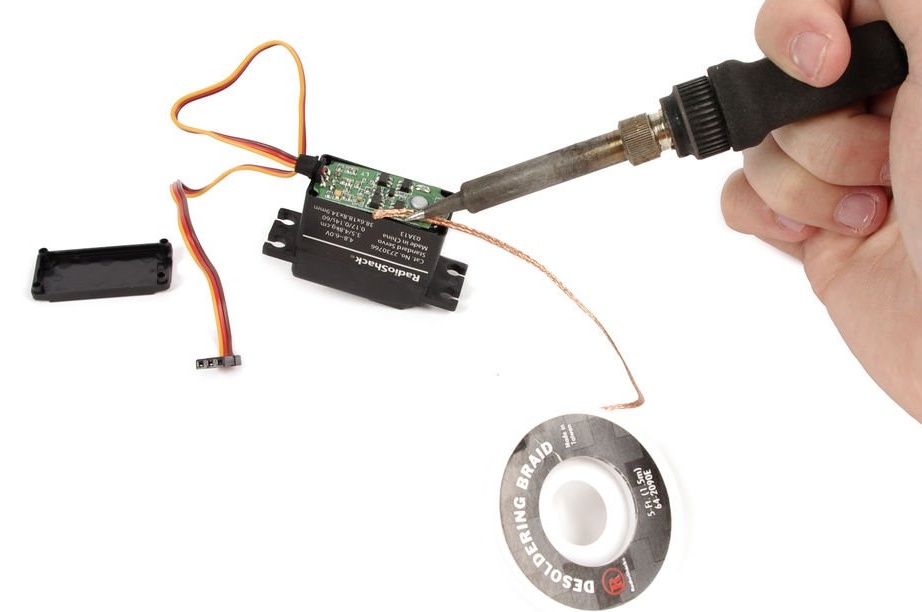
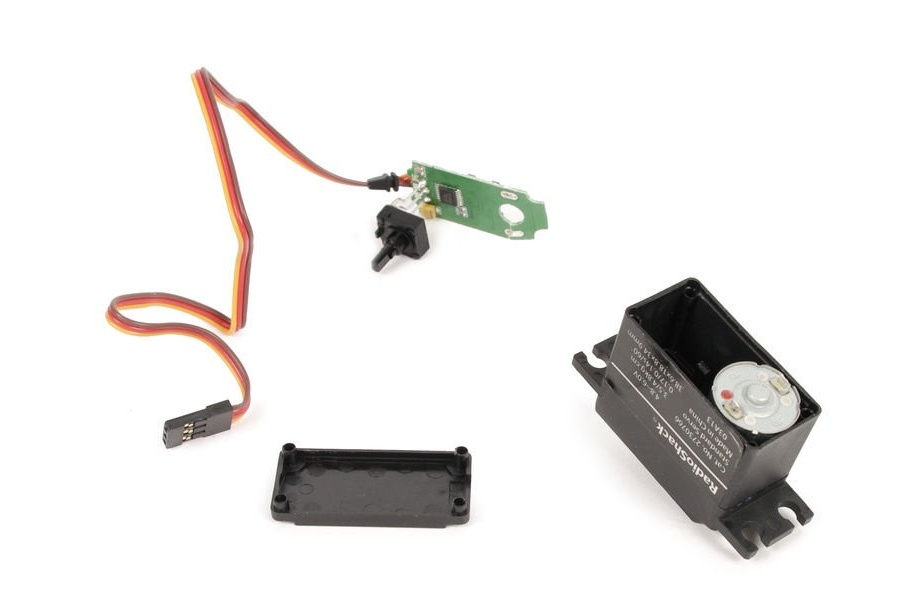




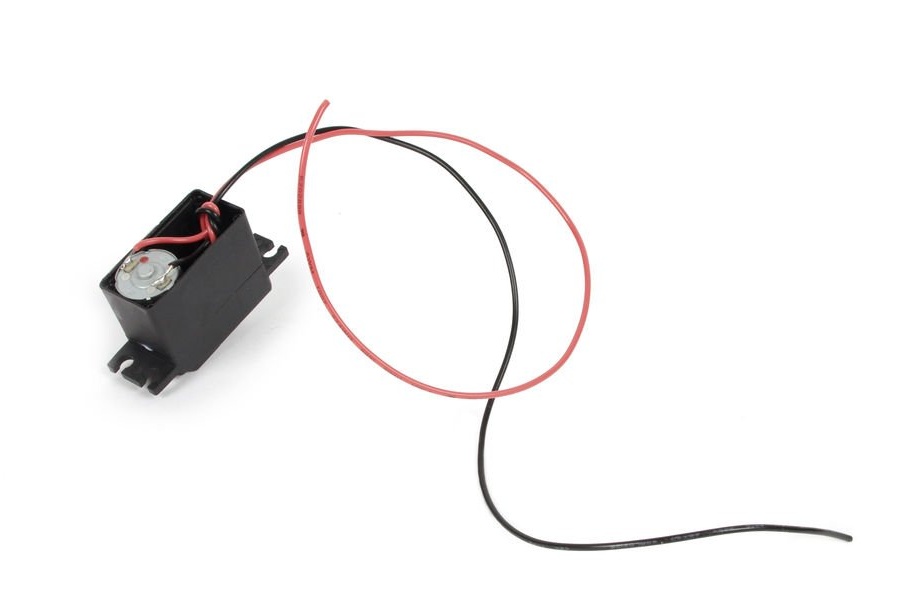
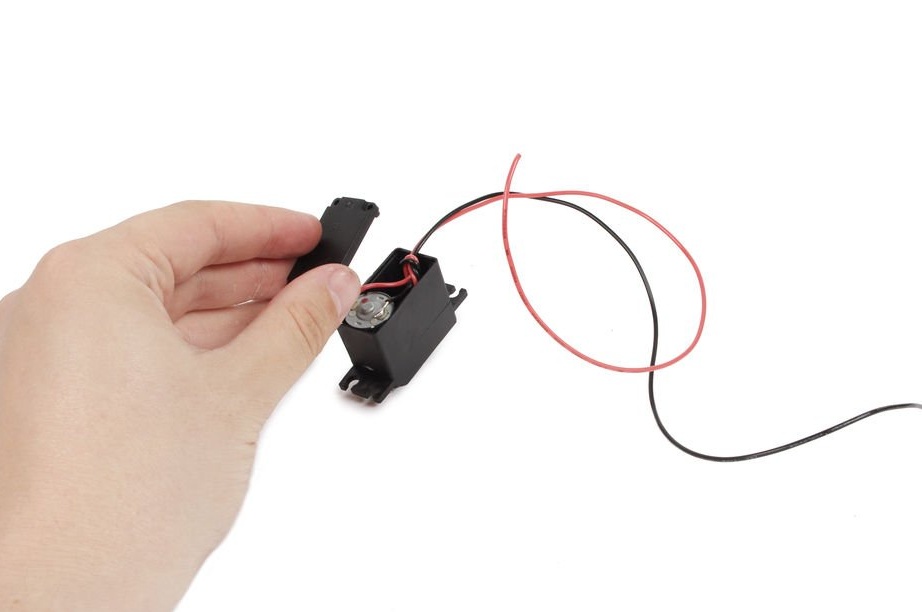

افتح مبيت المؤازرة عن طريق فك 4 مسامير على اللوحة السفلية. قم بفك اللوحة الداخلية وتوصيل الأسلاك الحمراء والسوداء بكل طرف من محرك الأقراص.
افتح محرك التروس وابحث عن الترس بغطاء بلاستيكي صغير يمنع الدوران المستمر. اقطع الغطاء من الترس.
الخطوة 3: الحفر
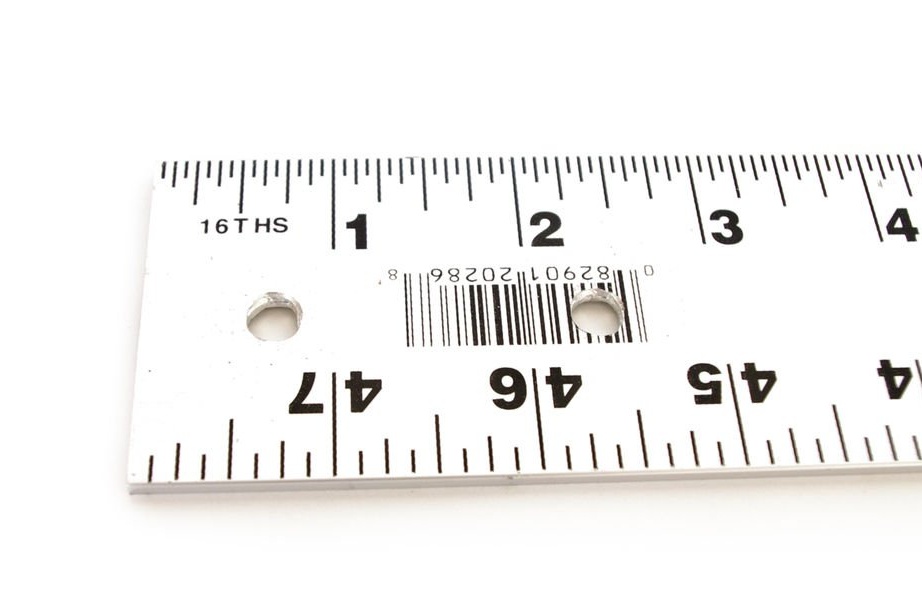


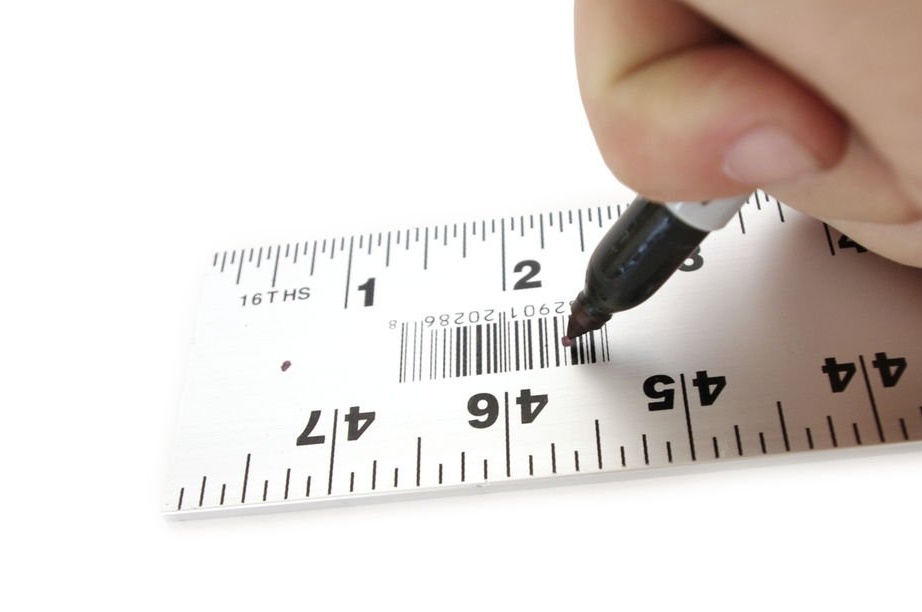
حفر حفرة ربع بوصة (6.3 ملم) في منتصف المسطرة ، حوالي 15 ملم من الحافة القصيرة. احفر حفرة ثانية بحوالي 60 ملم من نفس الحافة.
الخطوة 4: انحناء

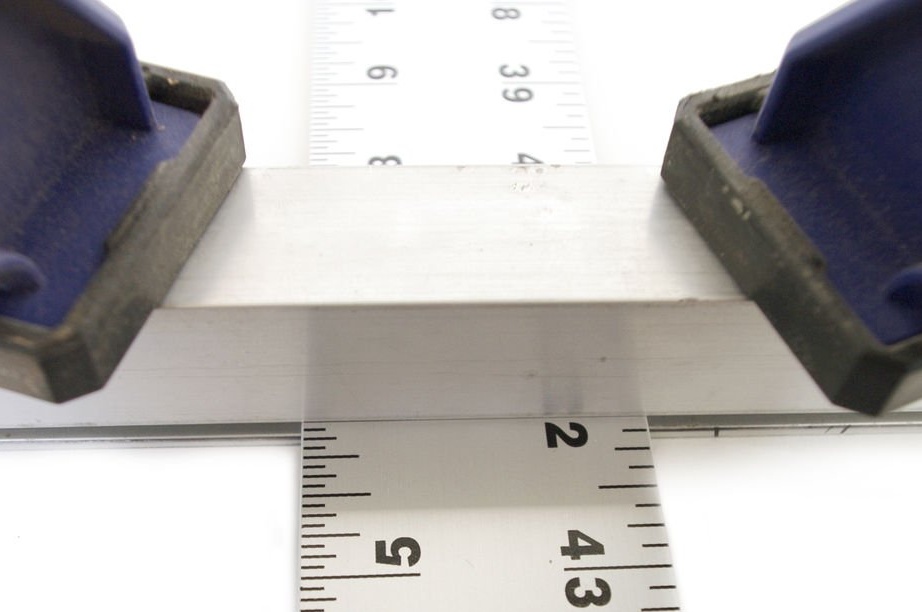
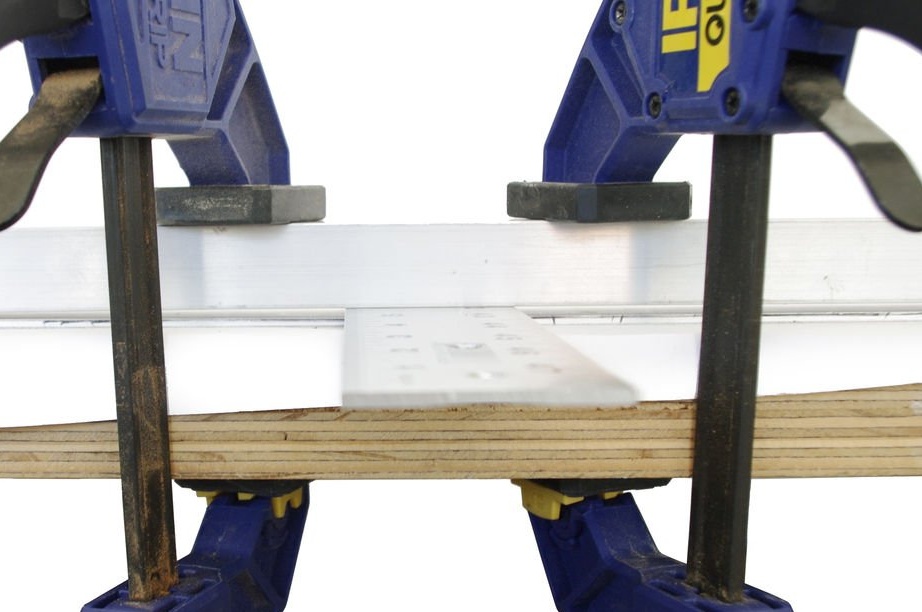

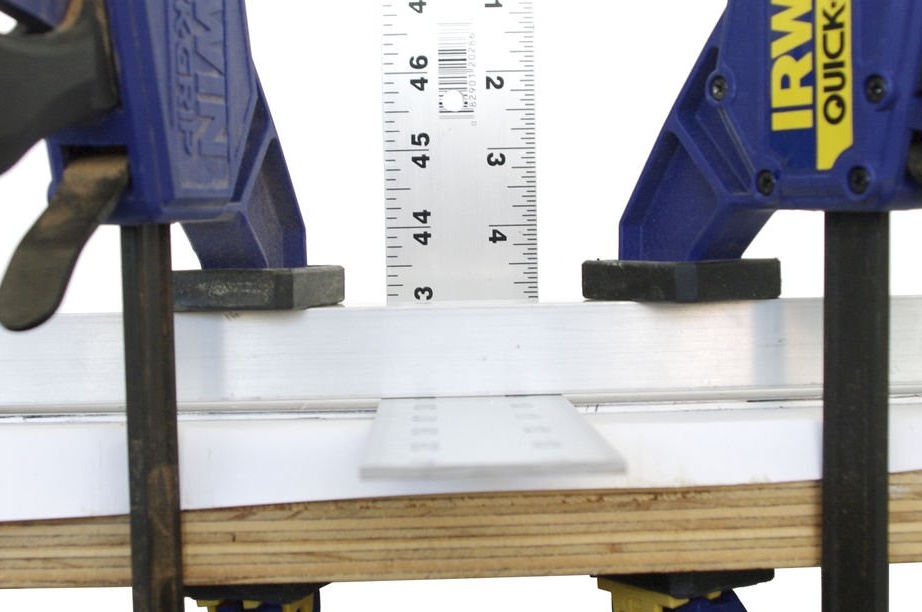

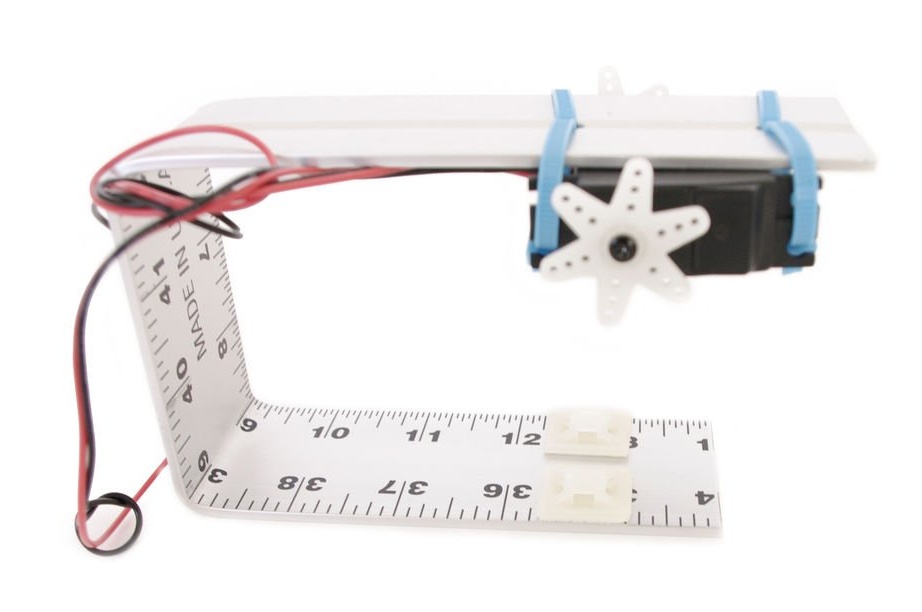
باستخدام ملزمة أو لوحين معدنيين مثبتين على حافة الطاولة ، ثني المسطرة بزاوية 90 درجة على مسافة 15 سم من الحافة التي تم حفر الثقوب فيها.
قم بعمل نفس الانحناء بزاوية 90 درجة على مسافة 15 سم من الحافة الأخرى. سوف تحصل على شكل في شكل الحرف P.
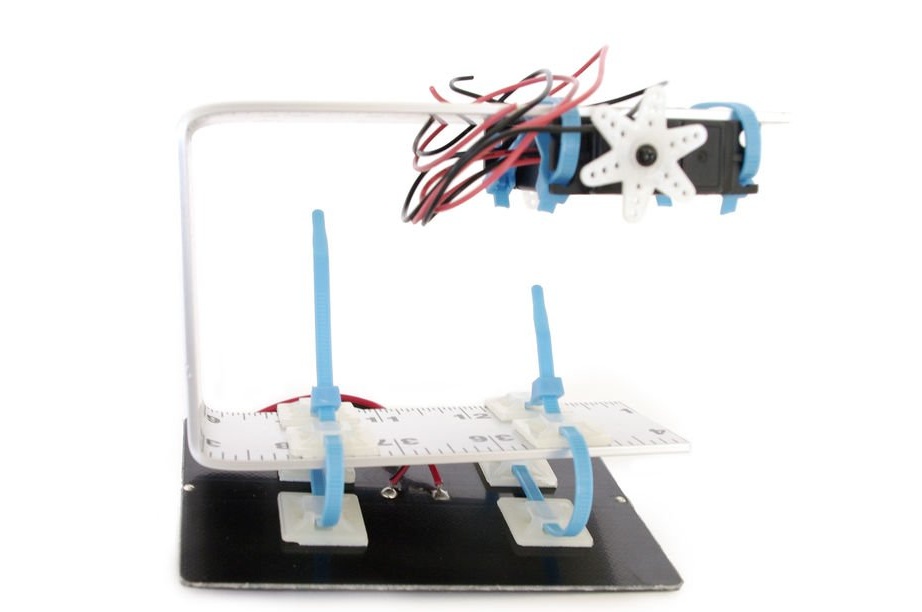
الخطوة 5: التوصيل
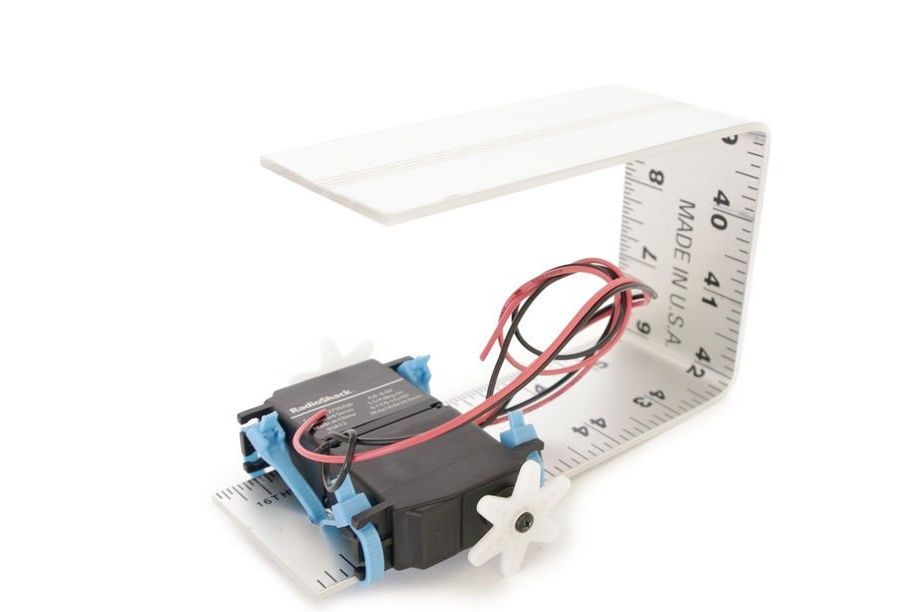

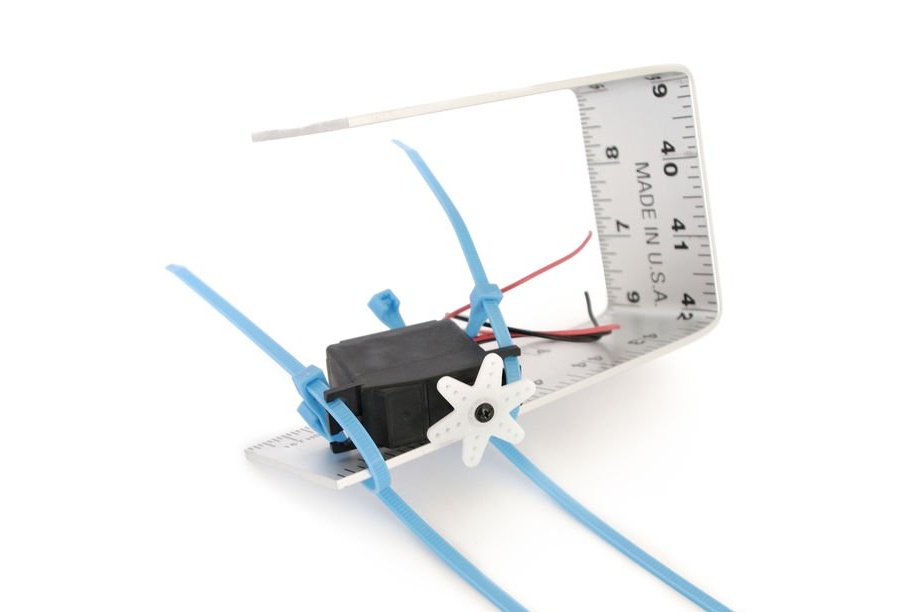
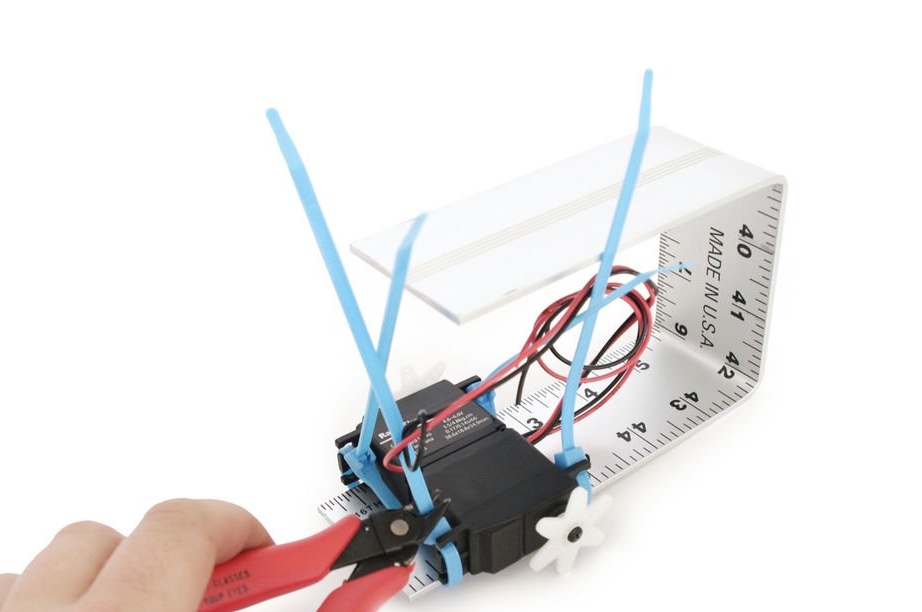
من الضروري إصلاح الماكينة على الخط باستخدام المشابك البلاستيكية ، من خلال الثقوب المحفورة. يجب أن يجلس المحركات مع ظهورهم لبعضهم البعض.
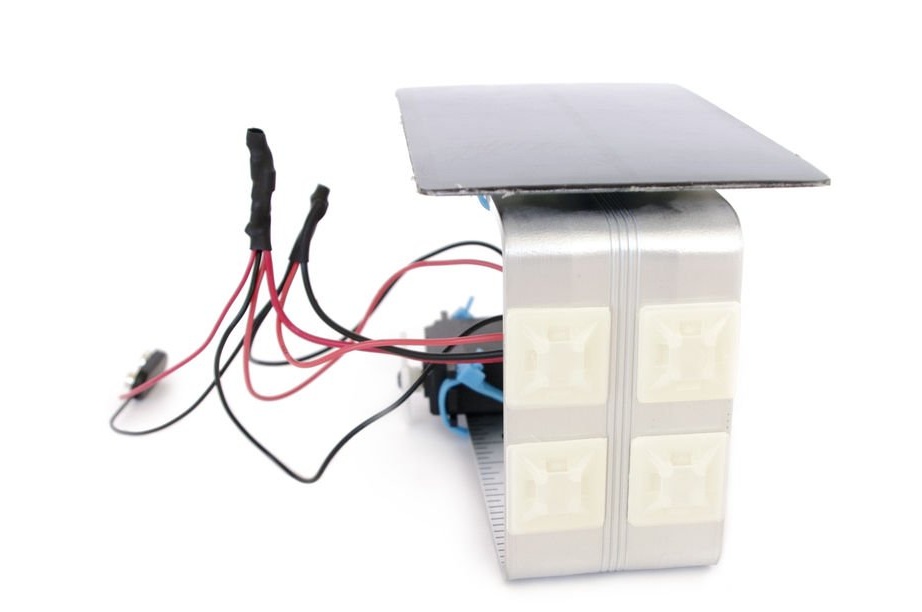
الخطوة 6: قاعدة المشابك
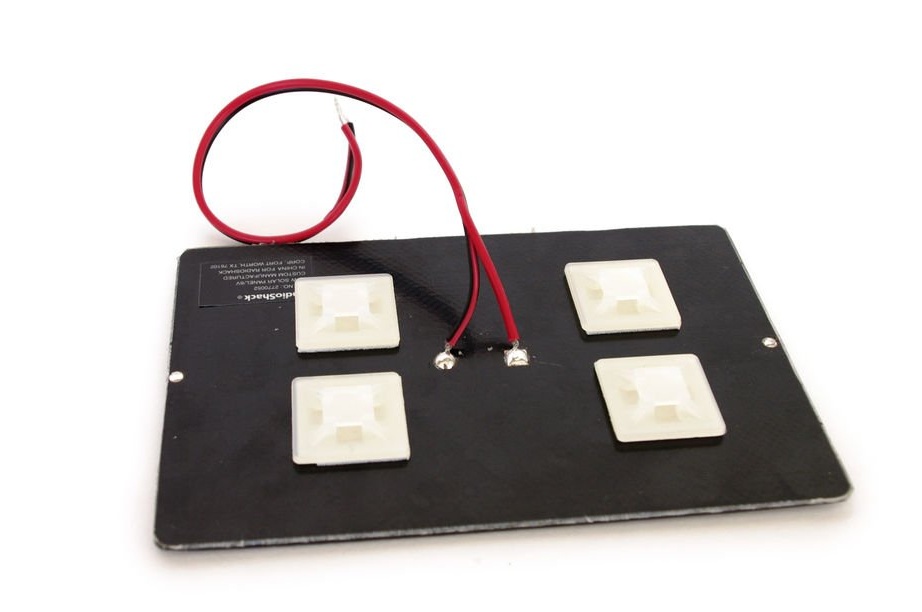

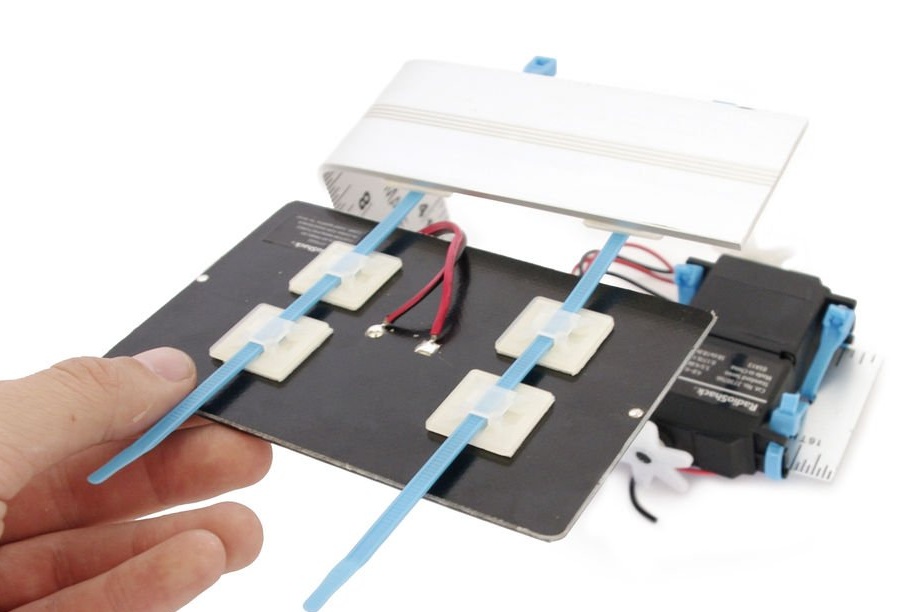
ضع زوجين من قواعد المشبك بجانب بعضهما البعض على الجزء الخلفي من الألواح الشمسية. من المهم أن تكون قنوات كل زوج على نفس الخط.
الخطوة 7: المزيد من الأسباب
إرفاق قاعدتين أخريين داخل شريط U ، على الجانب المقابل للمكابح.
الخطوة 8: التوصيل
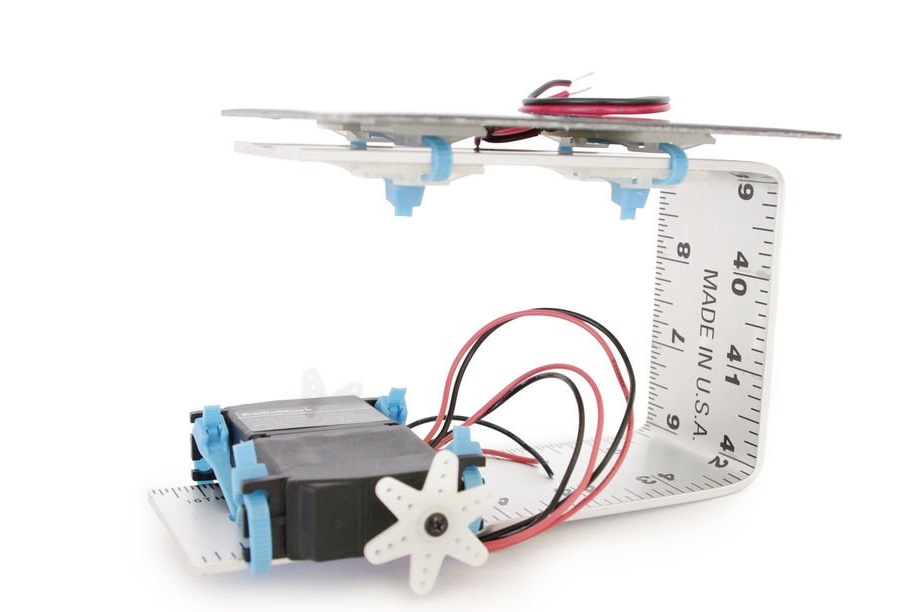
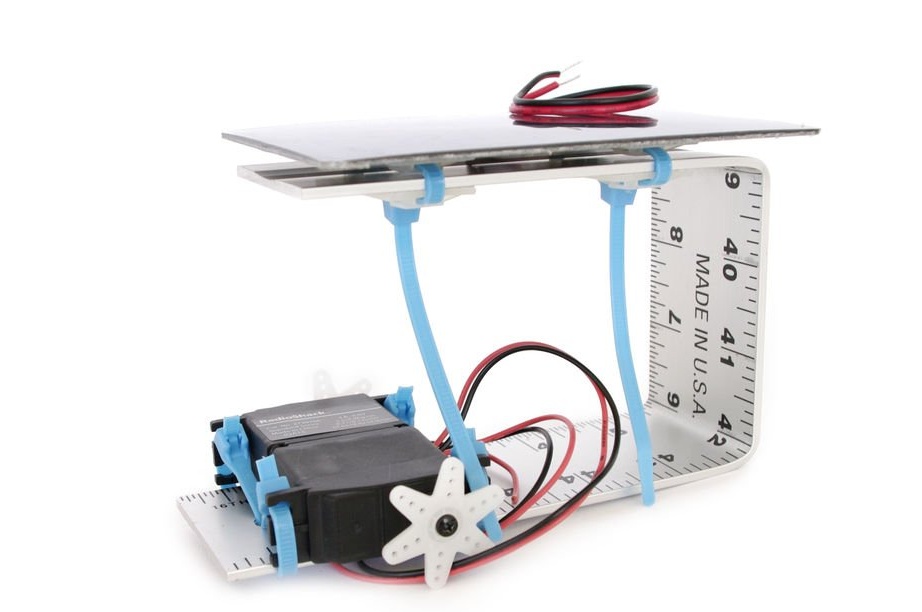
نعلق الألواح الشمسية مع المشابك من خلال قواعد ثابتة.
الخطوة 9: أدخل البطاريات


أدخل البطاريات في حزمة البطارية.
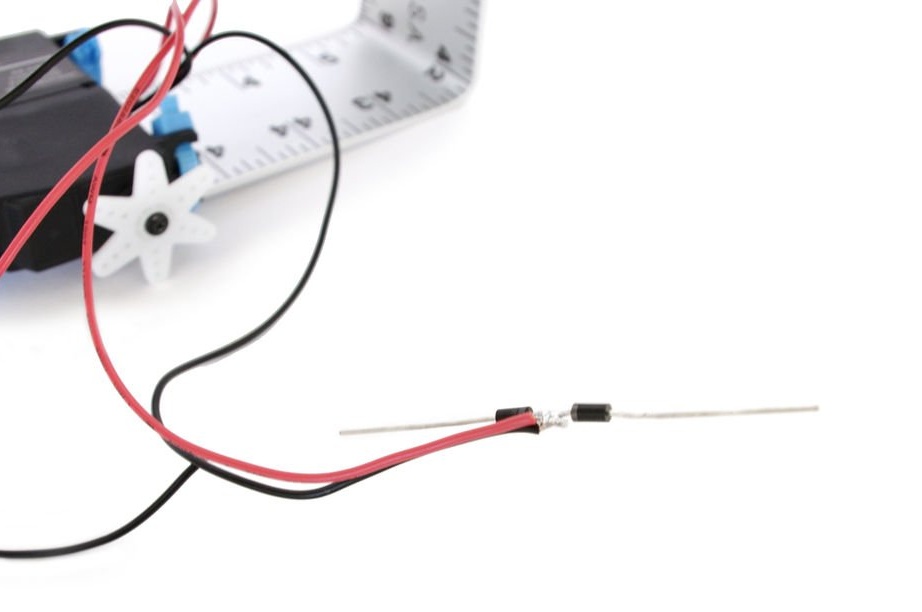
الخطوة 10: الثنائيات

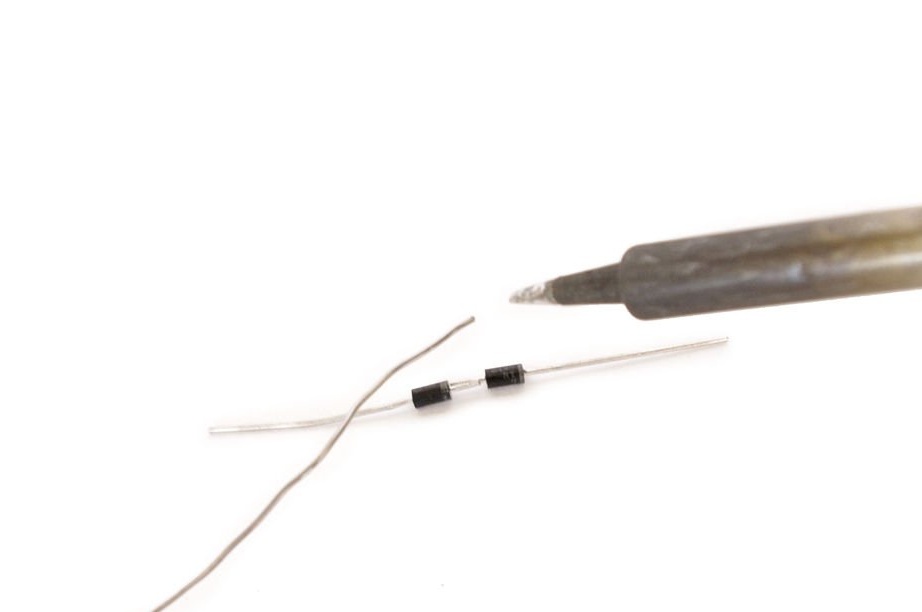
لحام الثنائيات مع الكاثودات (جانب الثنائيات مع المسار).
الخطوة 11: تجميع السلسلة
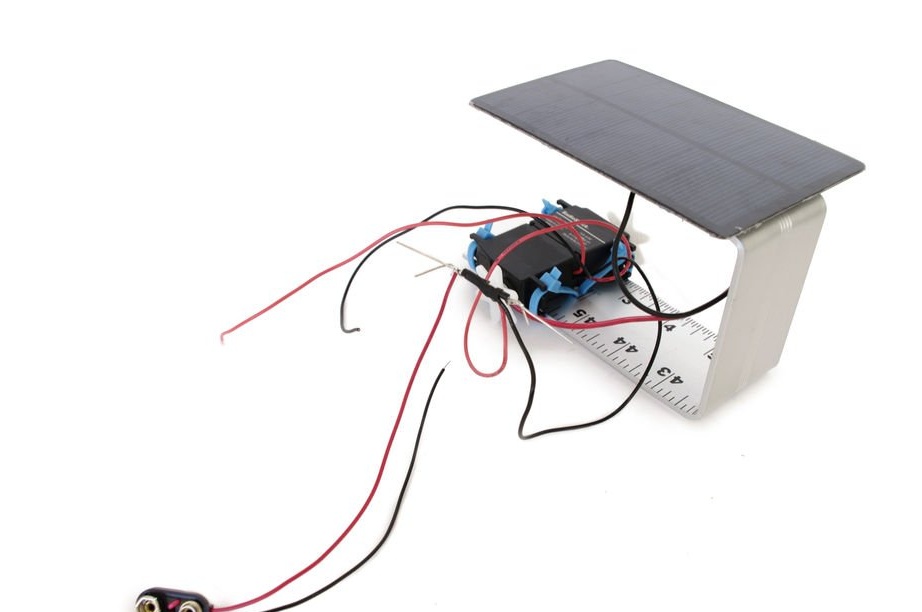
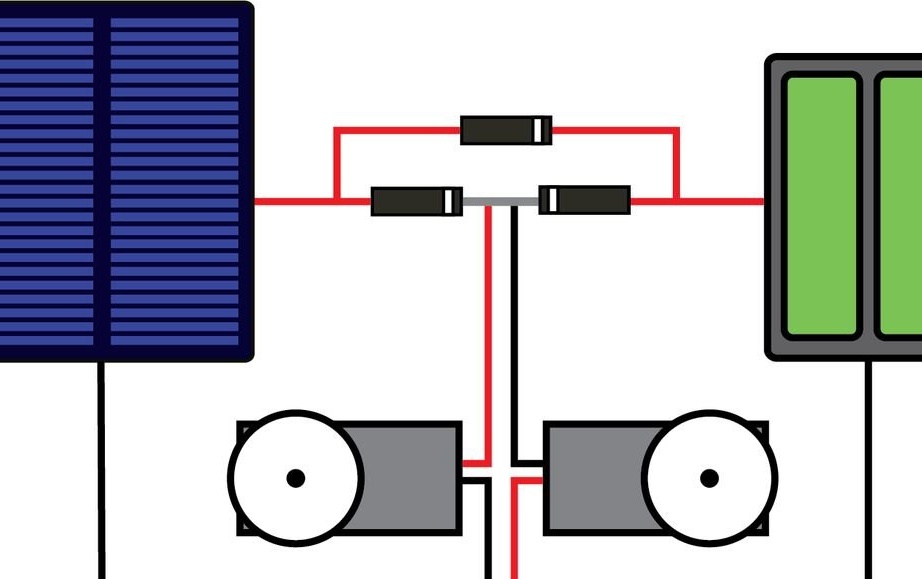
تعتمد دائرة هذا الروبوت على دائرة الشحن الشمسي البسيطة لديفيد كوك. تحتوي الدائرة على اثنين من صمامات ثنائية Schottky متصلة بالكاثود إلى الكاثود ، وصمام ثنائي متصل باللوحة الشمسية وواحدة من البطاريات. يسمح لك هذا التكوين بالطاقة بواسطة كل من البطاريات والألواح الشمسية ، حسب الظروف.
نظرًا لأن البطاريات قابلة لإعادة الشحن ، يتم توصيل صمام ثنائي شوتكي الثالث مباشرة من اللوحة الشمسية إلى حجرة البطارية لشحن البطاريات من الشمس.
لتوصيل كل شيء ، قم بتوصيل السلك الأحمر من إحدى الماكينات والسلك الأسود من الآخر إلى النقطة المركزية لاتصال الكاثود.
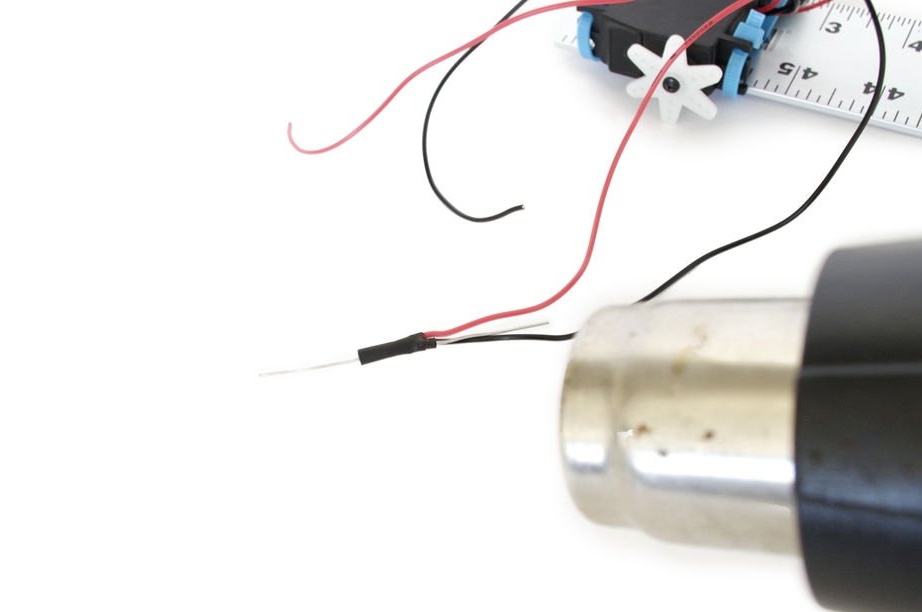
بعد ذلك ، قم بتوصيل السلك الأحمر من طرف البطارية إلى أنود أحد الثنائيات Schottky. قم بتوصيل السلك الأحمر من الألواح الشمسية إلى الأنود على صمام ثنائي آخر.
الآن قم بلحام أنود الصمام الثنائي الثالث بالسلك الأحمر المتصل باللوحة الشمسية ، والكاثود إلى السلك الأحمر من طرف البطارية.
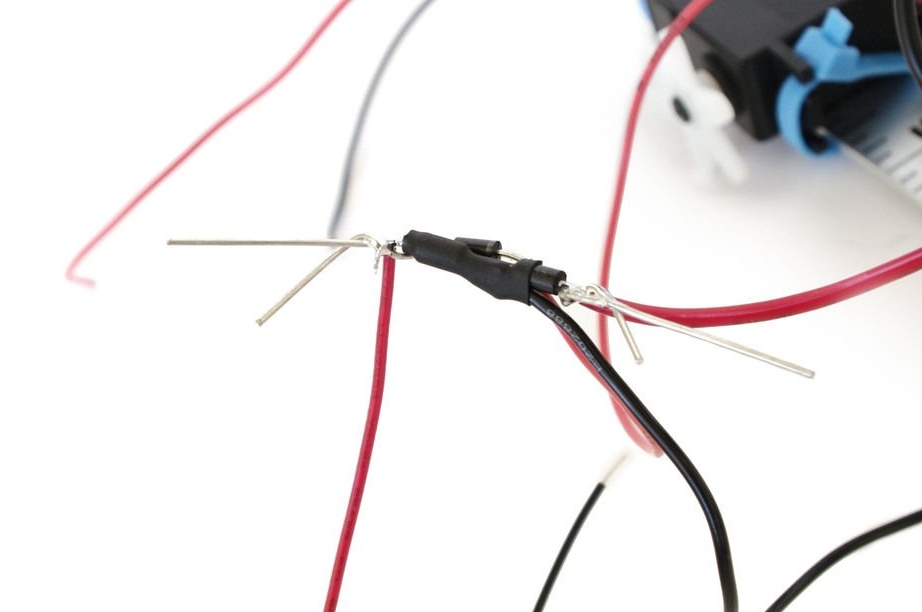
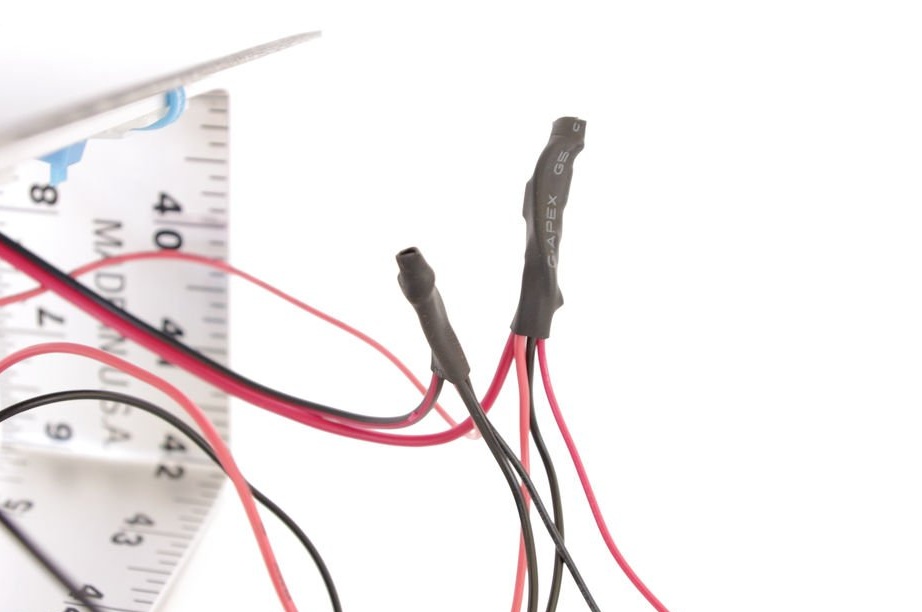
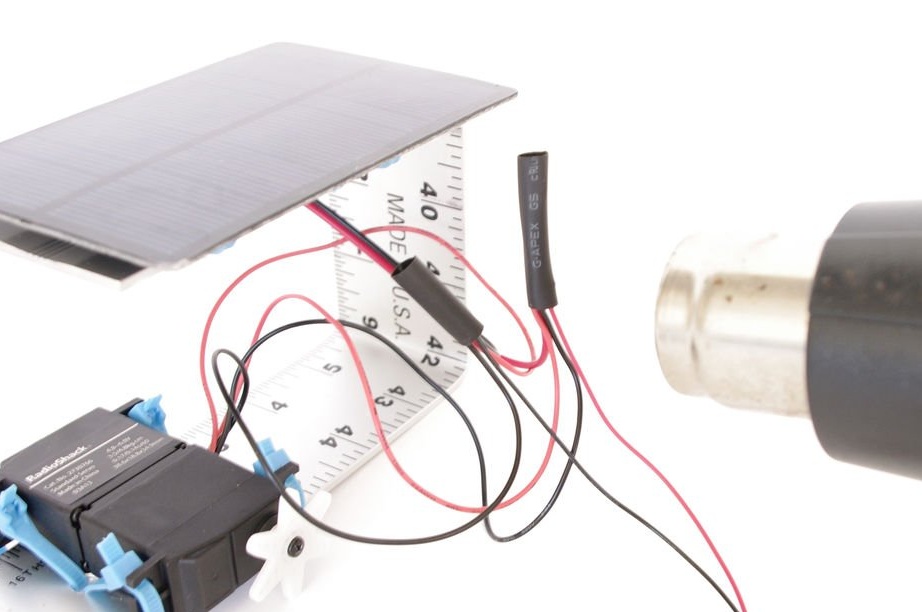
لف جميع الأسلاك بأنابيب الانكماش الحراري لحماية الدائرة من الدوائر القصيرة.
الخطوة 12: بعض الأسلاك
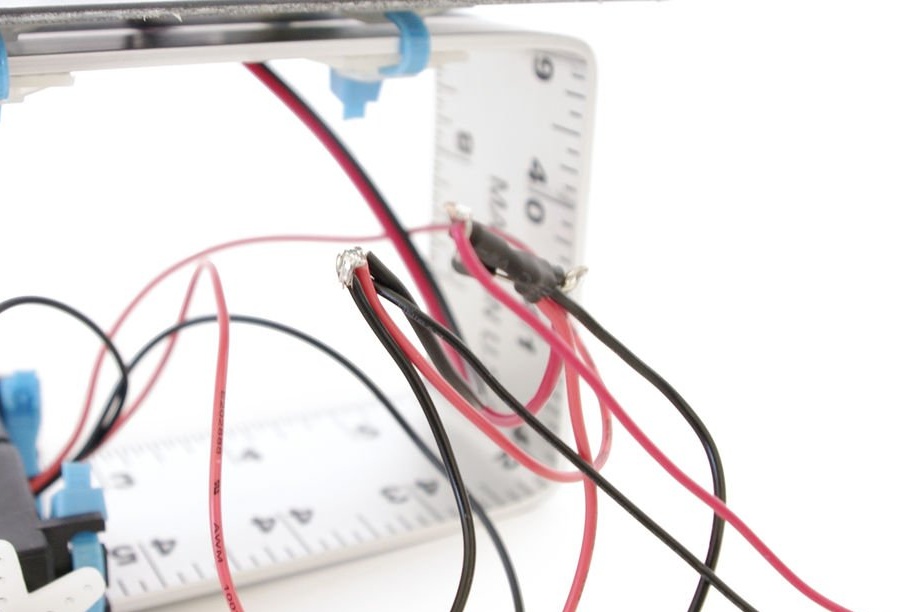
لحام جميع الأسلاك السوداء والأسلاك الحمراء الحرة المتبقية من الماكينات.
احصل على مفصلين ملحومين ؛ واحد من أجل السلطة ، وواحد من أجل التأريض. لف كل من هذه المفاصل بأنبوب الانكماش الحراري أو الشريط الكهربائي.
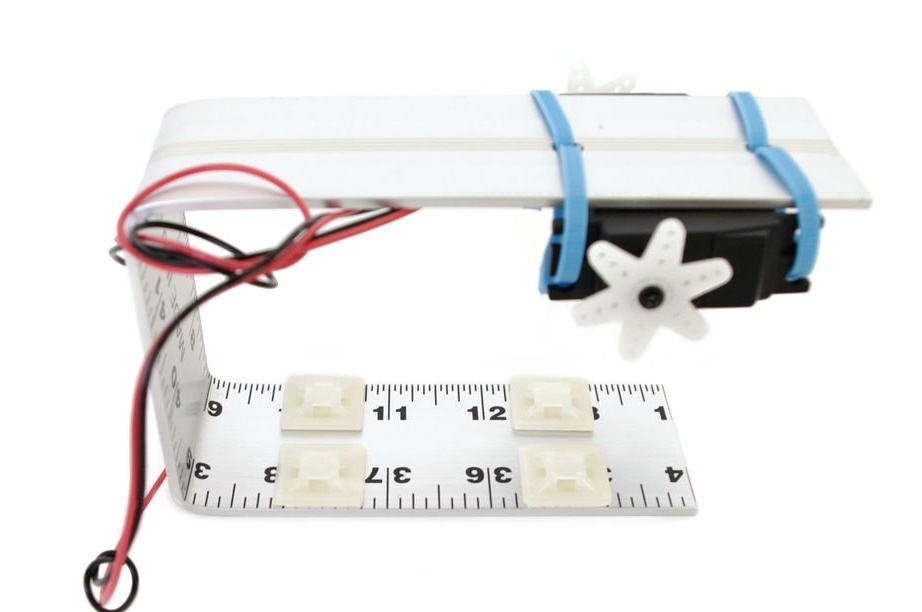
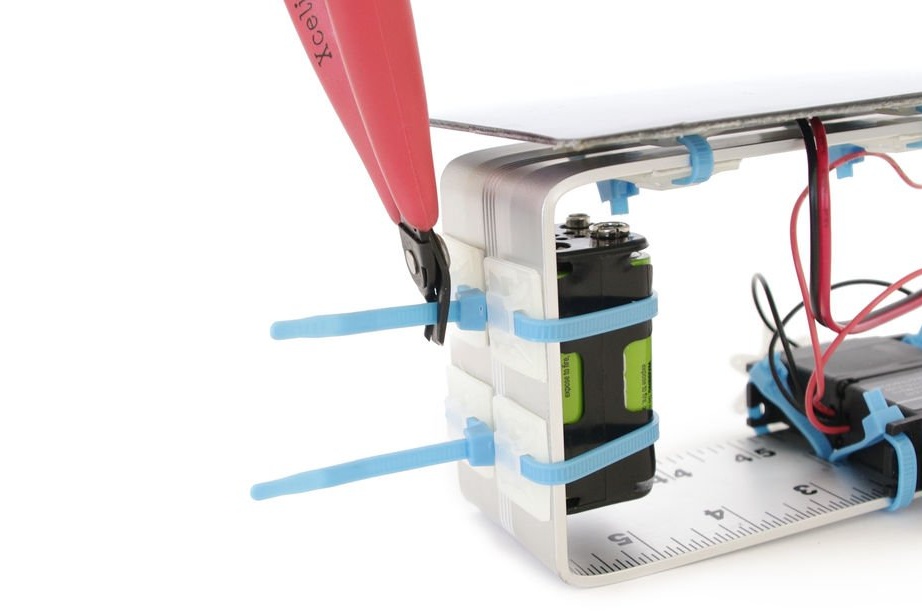
الخطوة 13: وبعض الأسباب الأخرى للمشابك
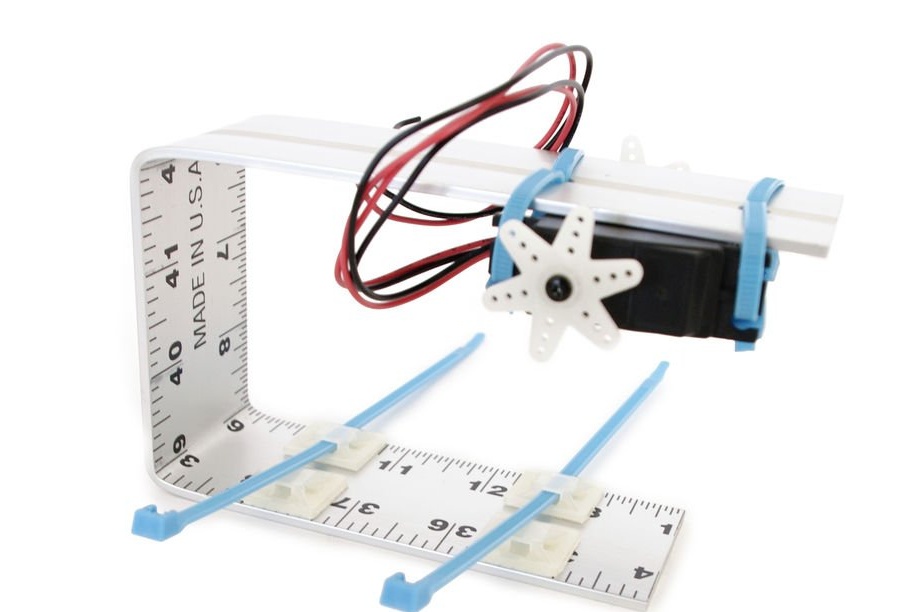
اربط زوجين من القواعد إلى الجانب السفلي من المسطرة المنحنية على شكل حرف U.
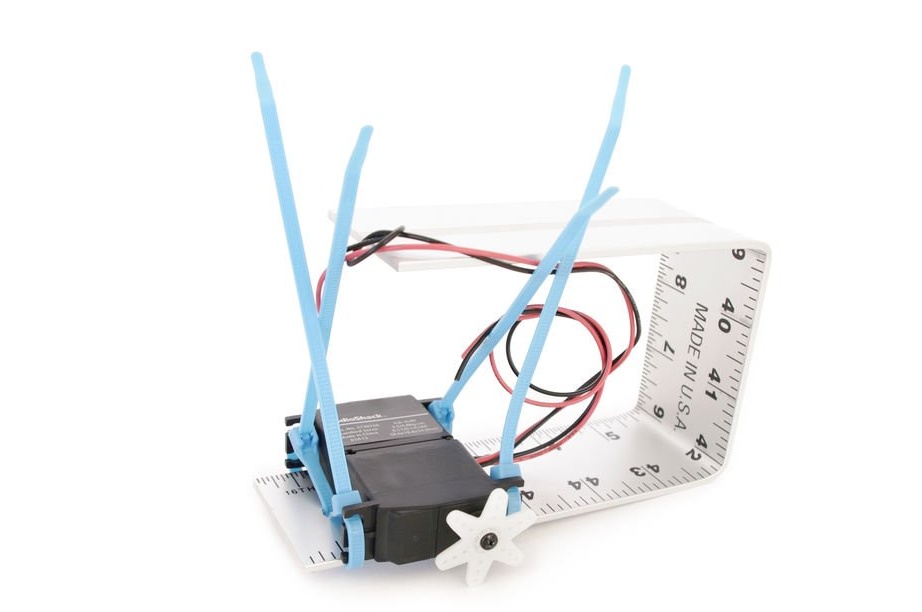
الخطوة 14: تأمين البطاريات
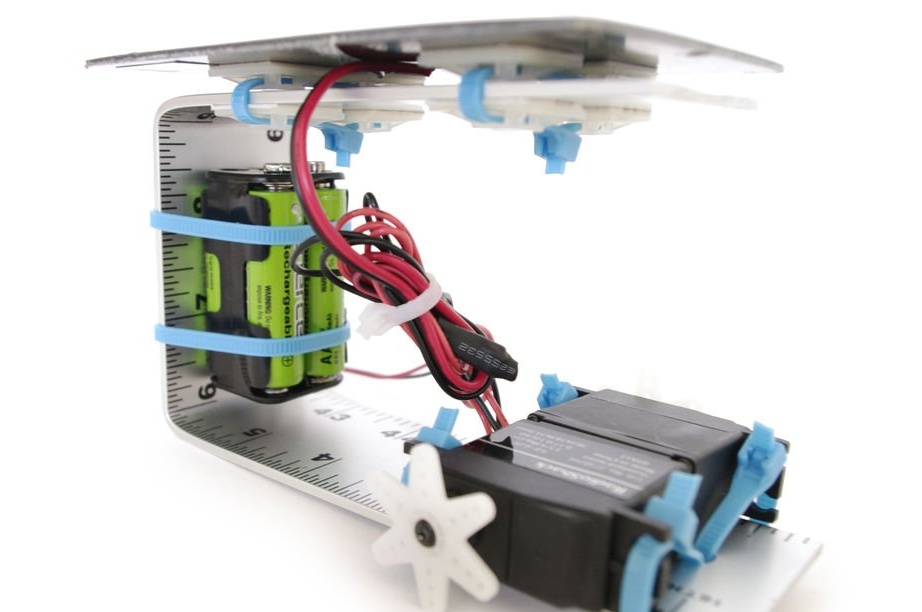
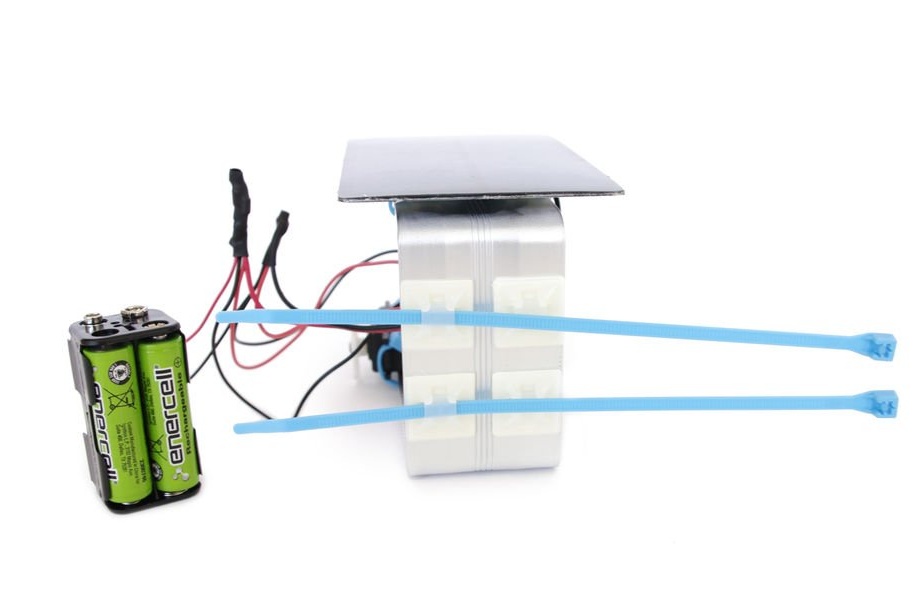
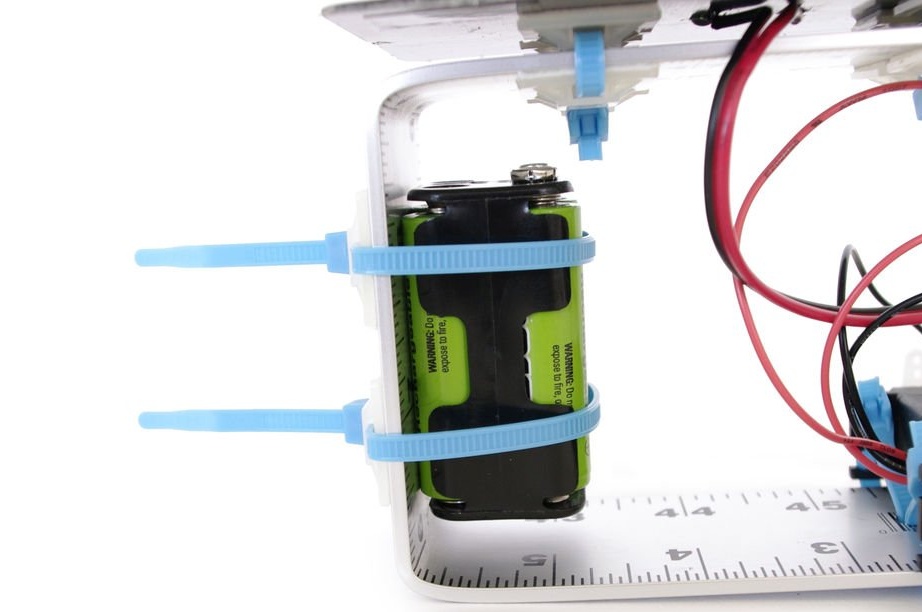
قم بتأمين البطاريات بمشابك داخل المسطرة على شكل حرف U بحيث تستقر في مكانها بلا حراك.
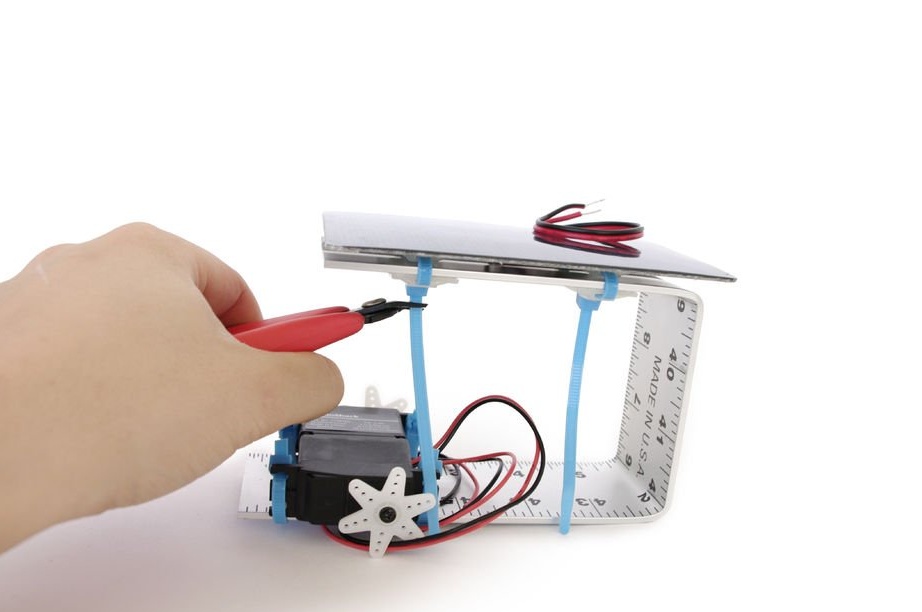
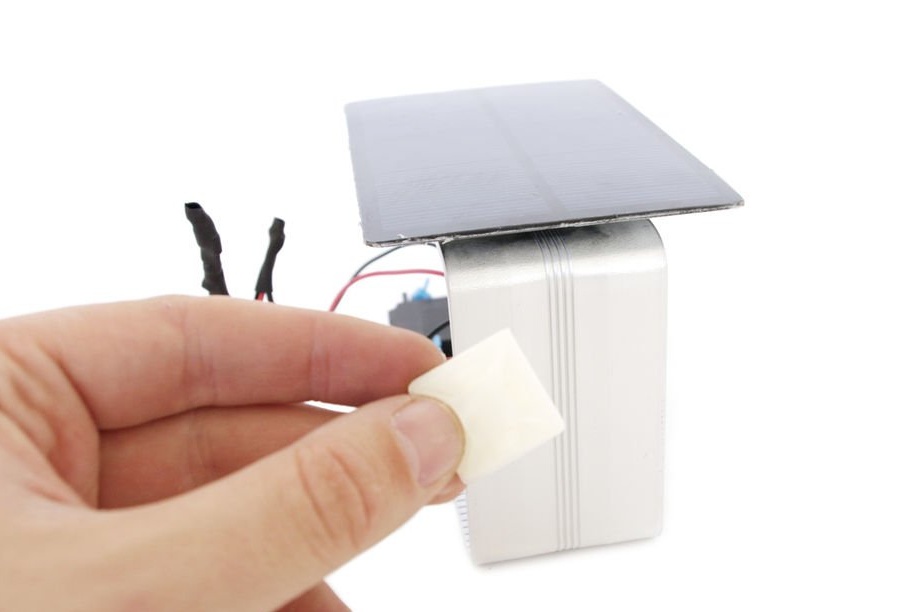
الخطوة 15: التشذيب


اقطع الخطافات على حوامل الحائط البلاستيكية.
الخطوة 16: العجلات
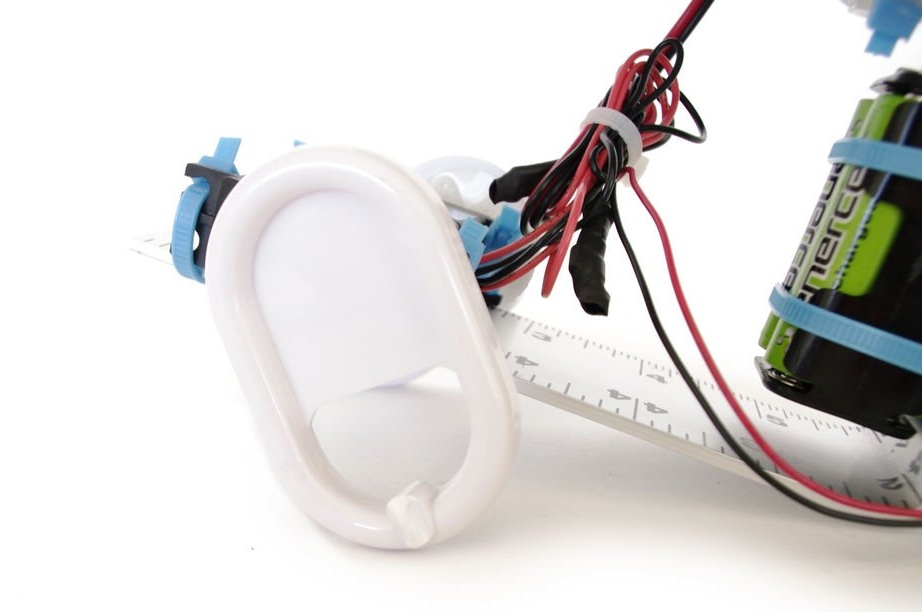
لاصق الجدار يتصاعد إلى التروس الخارجية للمكابح (سيكون هذا شيئًا مثل العجلات).
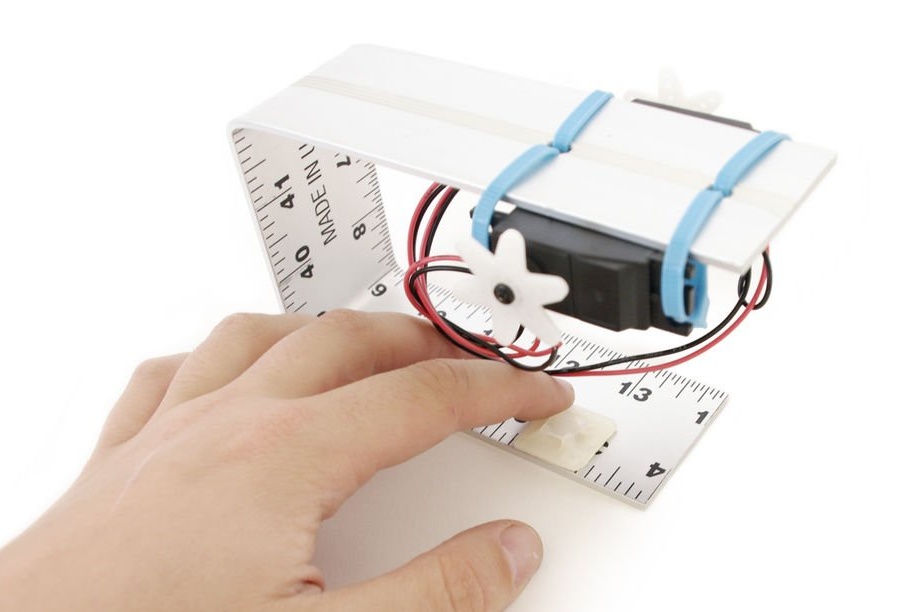
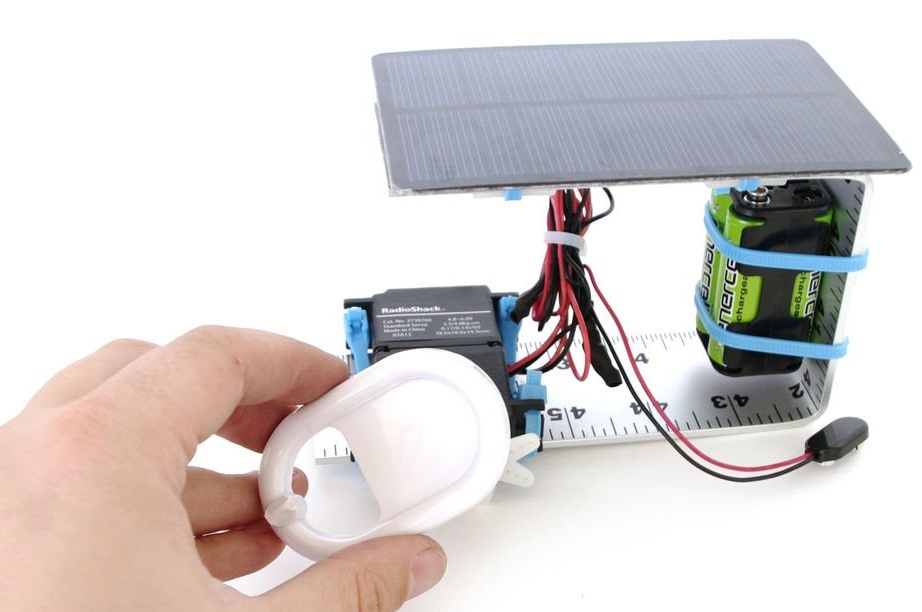
الخطوة 17: تشغيل!

قم بتوصيل الرصاص بحزمة البطارية وسيبدأ الروبوت في التحرك.