

هل تريد خوض معركة بين روبوتات العنكبوت؟ ثم ادرس هذه المقالة بعناية ، حيث سيخبرك المعلم بكيفية صنع مثل هذا العنكبوت. ولوضوح عمله ، دعنا نرى الفيديو.
الأدوات والمواد:
عنكبوت
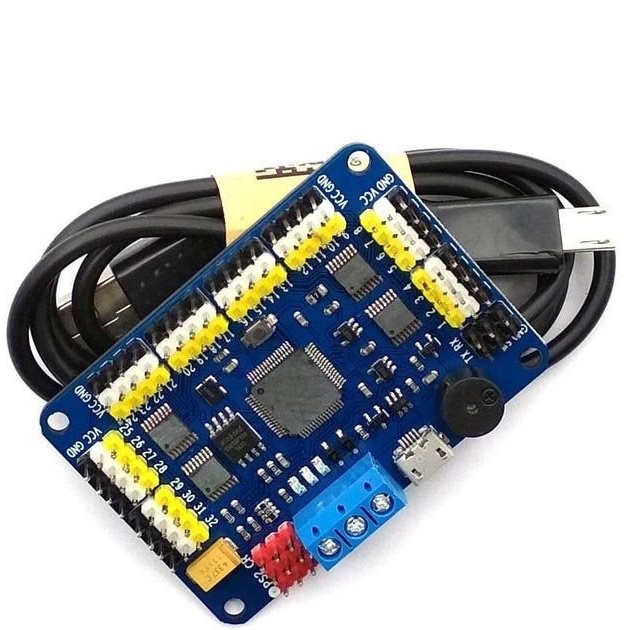
تحكم سيرفو 32 قناة ؛
- جهاز تحكم Wemos D1 Mini ؛
- محركات سيرفو MG90S - 18 قطعة ؛
-Ubec 6A 5V تحكم.
- محول باك DC-DC ؛
- صداري.
-البطارية.
بالنسبة للبرج
- محركان ؛
-وحدة الطاقة.
- محول تخفيض.
مضاعفات
طابعة ثلاثية الأبعاد
- مسدس غراء
-غراء.
- مفك البراغي ؛
-الأصحاب.
- شريط مزدوج الجوانب ؛
- كماشة.
-سكين.
-Nadfiles.
-كرات بلاستيكية.
- ملحقات لحام.






الخطوة الأولى: طباعة الأجزاء
تحتاج أولاً إلى طباعة تفاصيل الجسم والساقين على طابعة ثلاثية الأبعاد. يمكنك تنزيل الملفات للطباعة على هذا الرابط.


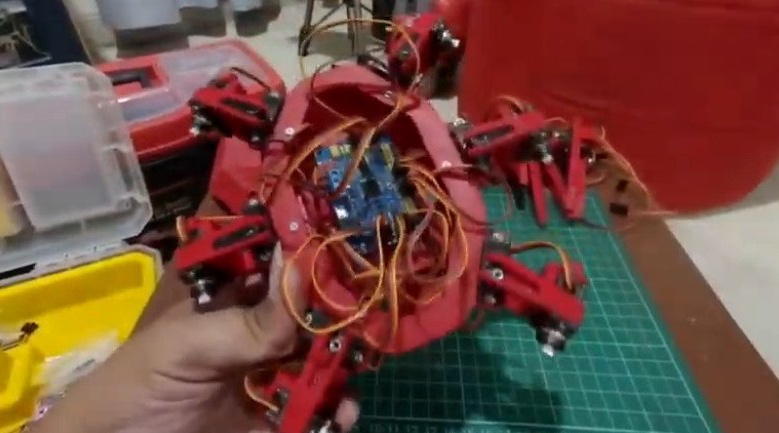
الخطوة الثانية: البناء
الآن تحتاج إلى جمع robopauk.
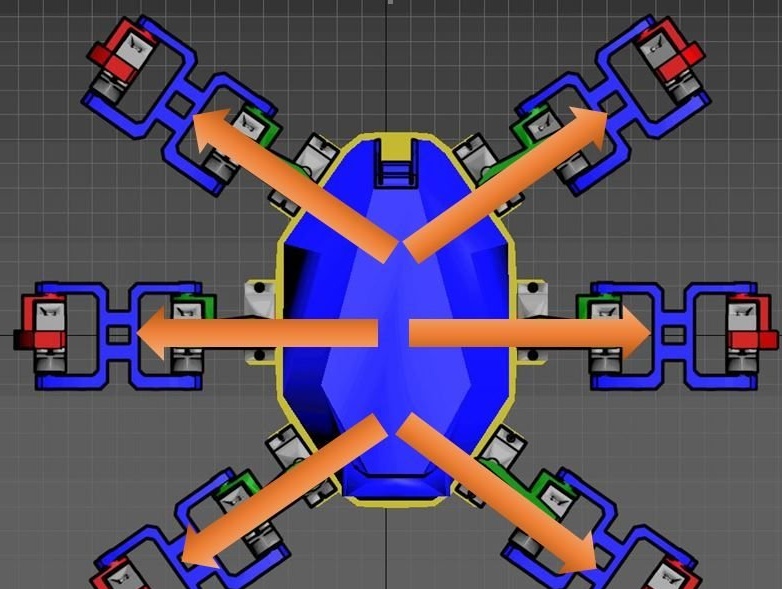
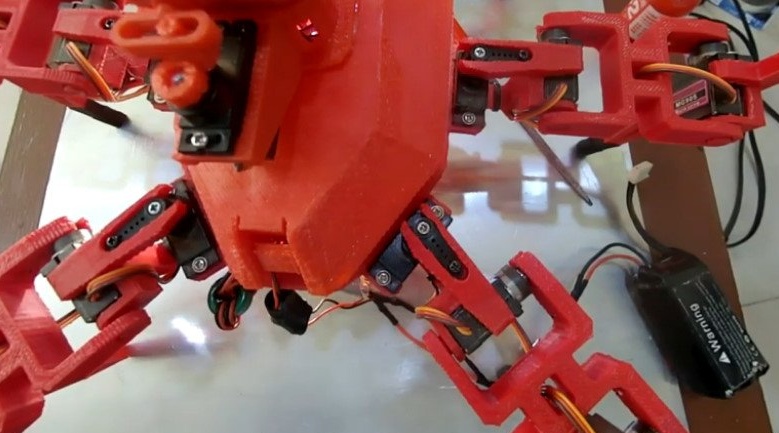
يقوم السيد بتثبيت الماكينات على مفاصل أرجل العنكبوت. في المجموع ، يحتوي الروبوت على ستة أرجل وثلاثة أجهزة في كل ساق.








تثبيت الماكينات على منصة الهيكل.




يربط المفاصل الأولى للساقين بمرفقات المنصة.




يتم سحب الأسلاك في الفتحات التكنولوجية وتوصيلها بجهاز التحكم.





تثبيت بذرة.


يحدد المفاصل الثانية للساقين. يربط الأسلاك من الماكينات إلى وحدة التحكم.






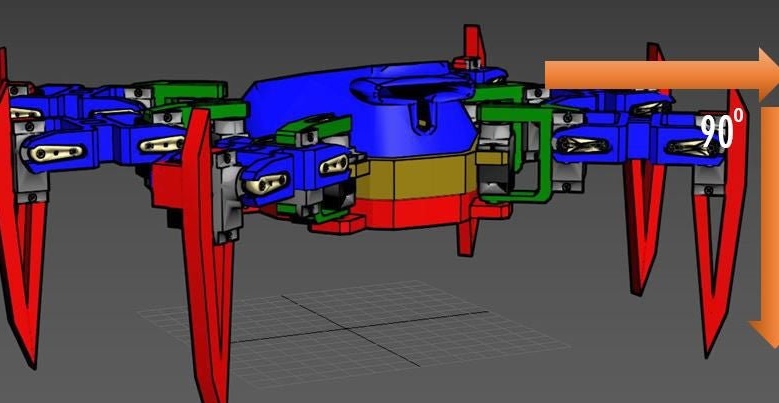
يثبت المفصل الثالث. مع هذا المفصل ، سيقف العنكبوت على السطح عند الحركة.


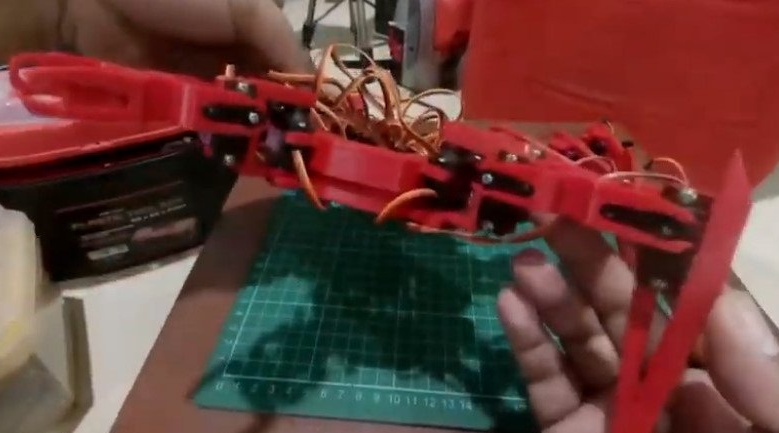

يربط ويتحقق من تشغيل كل محرك سيرفو.



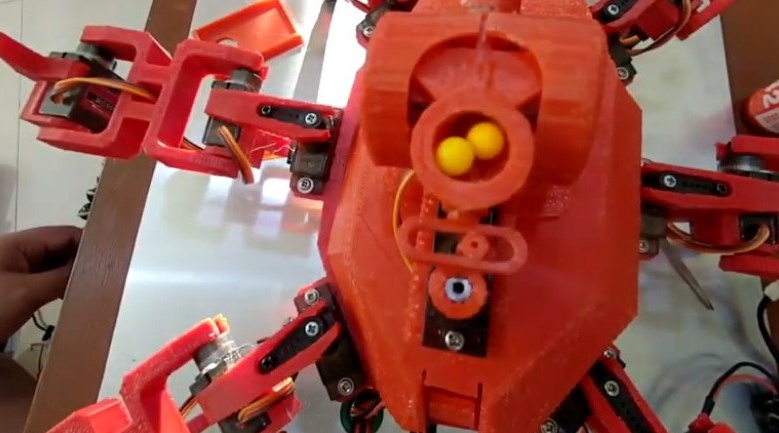
إذا كان كل شيء يعمل على إصلاح الأسلاك بالعلاقات ، فقم بتثبيت البطارية وإغلاق الغطاء.



يمكن رؤية عملية البناء في الفيديو.
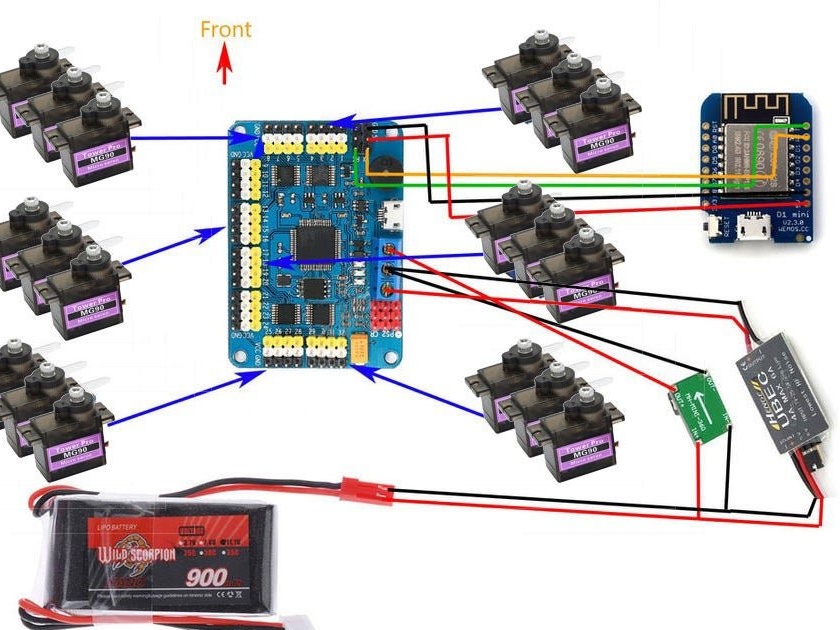
الخطوة الثالثة: حول الإلكترونيات
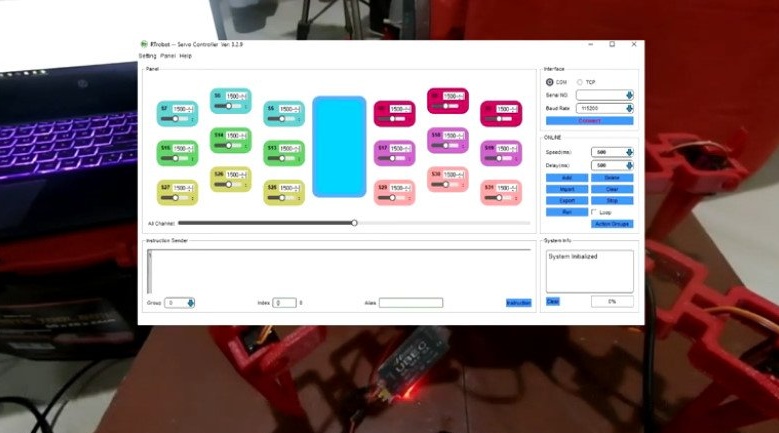
استخدم المعالج وحدة تحكم مؤازرة RTrobot للتحكم في الحركات. يمكن تحميل برنامج الإدارة هنا أو هنا.
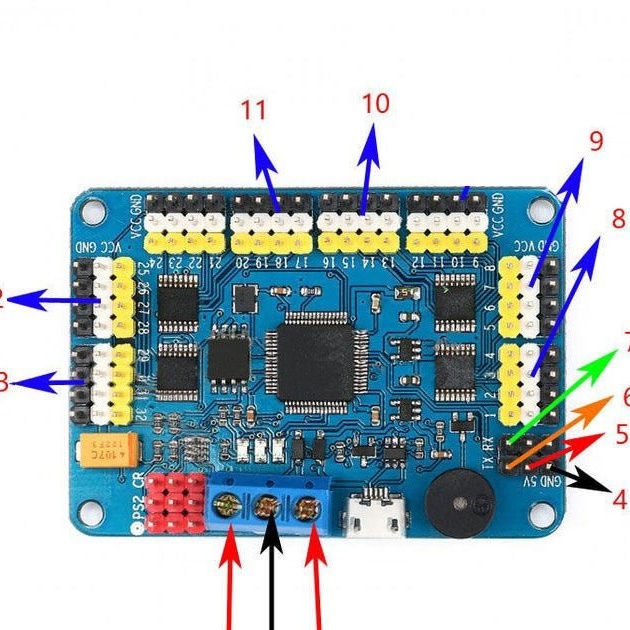
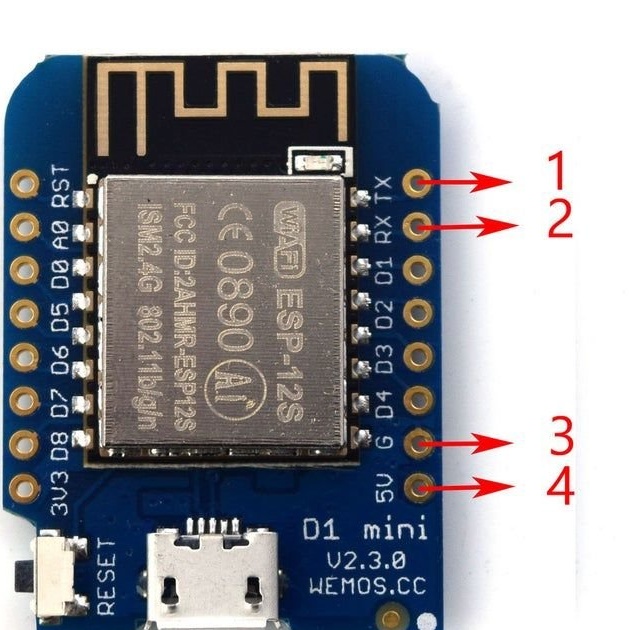
كل شيء متصل على النحو التالي:
1. 5V (+) UBEC الإخراج
2. الأرض من UBEC ومحول باك
3. 5 فولت إمدادات الطاقة (+) من المحول
4.on على دبوس Wemos D1 mini G
5. إلى ويموس 5v
6. إلى Wemos D1 RX
7. Wemos TX
يتم توصيل محركات الأقراص المؤازرة بالدبابيس من 8 إلى 13.
قم بتثبيت الرمز على NodeMCU. يمكنك تنزيله هنا.
WeMos D1 mini هو الحد الأدنى لبطاقة Wi-Fi ESP8266.
باستخدام wemos D1 mini كنقطة وصول WIFI ، يمكنك إرسال أمر تسلسلي إلى وحدة تحكم المؤازرة. كل ما هو مطلوب هو مجرد وميض لوحة nodeMCU برمز ، ويمكنك توصيل الهاتف الذكي بـ nodeMCU AP. بعد ذلك ، باستخدام متصفح الويب ، انتقل إلى http://192.168.4.1.
من المهم.
عند تشغيل المؤازرة ، ستنتقل جميع الماكينات إلى الوضع الأصلي / القياسي
قم بتثبيت الماكينات بأكبر قدر ممكن من الدقة ، كما هو موضح في الشكل أعلاه أو في الفيديو
اضبط موضع المفاصل وأوقف تشغيل الجهاز ثم أعد تشغيله للتأكد من أن جميع الأرجل في الوضع الصحيح
إذا تمسكت المفاصل ، فرك ، اضبط الوضع.
الخطوة الرابعة: البرج
ننتقل الآن إلى تجميع البرج.
أولاً ، يجب طباعة تفاصيل البرج. يمكنك تنزيل الملفات على هذا الرابط.
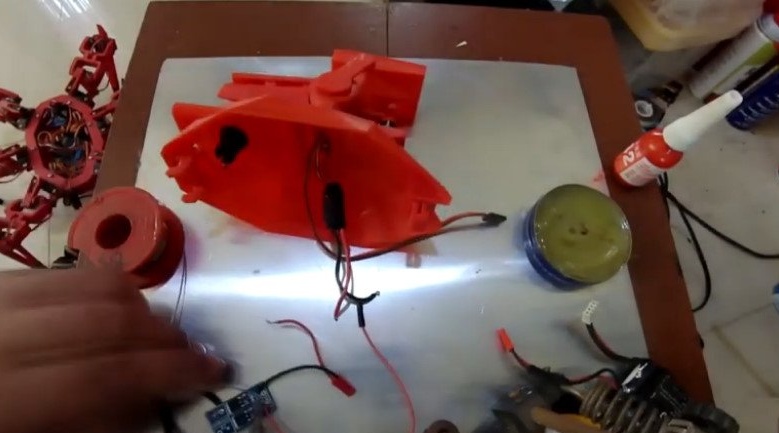
ثم يواصل السيد لتجميع البرج. يوجد أدناه دائرة لتحويل البرج وتوصيل الأجزاء الكهربائية.
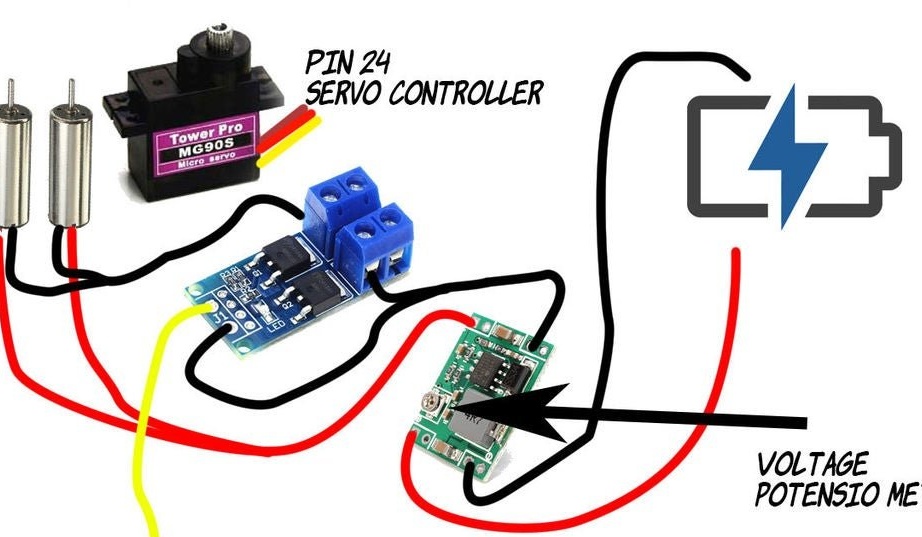
يركب مضاعفات على البرج.







يلتصق الشريط على الوجهين بالبكرات.


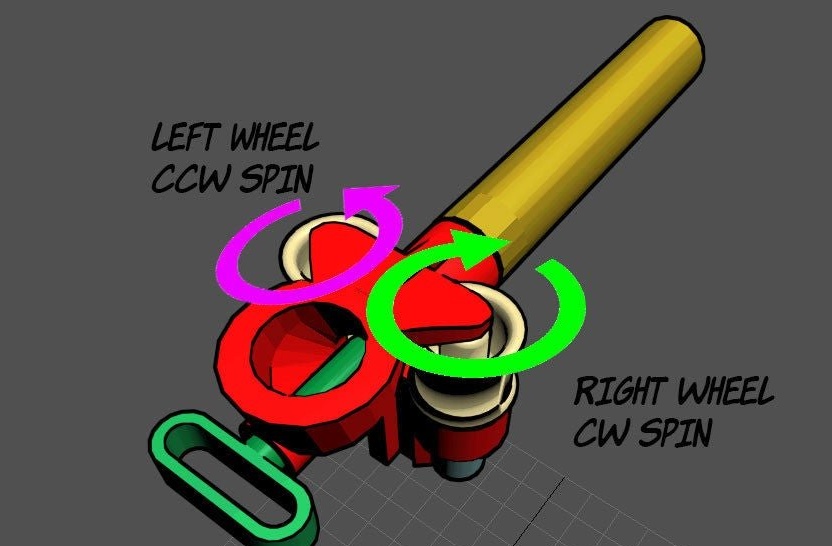
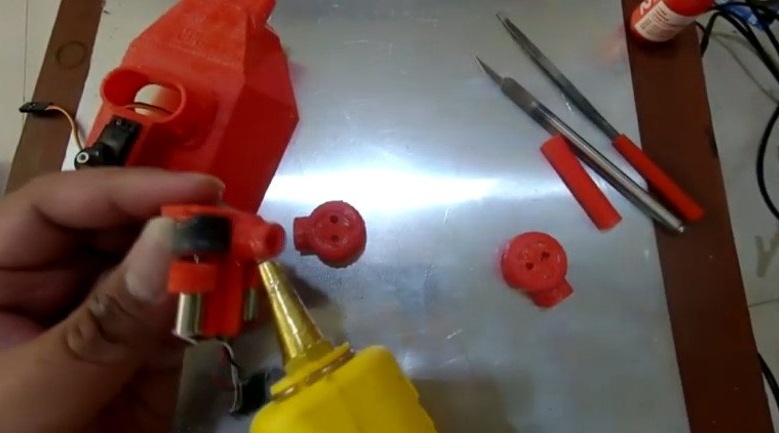
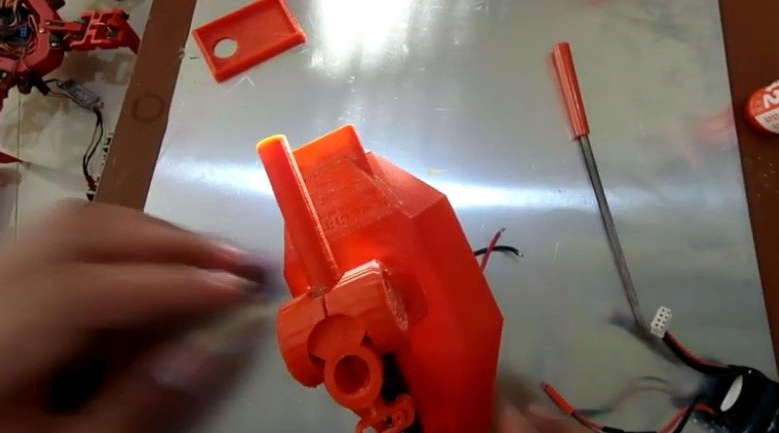
يجمع بندقية. يركب المحركات في حامل. تثبيت بكرات على مهاوي المحرك.







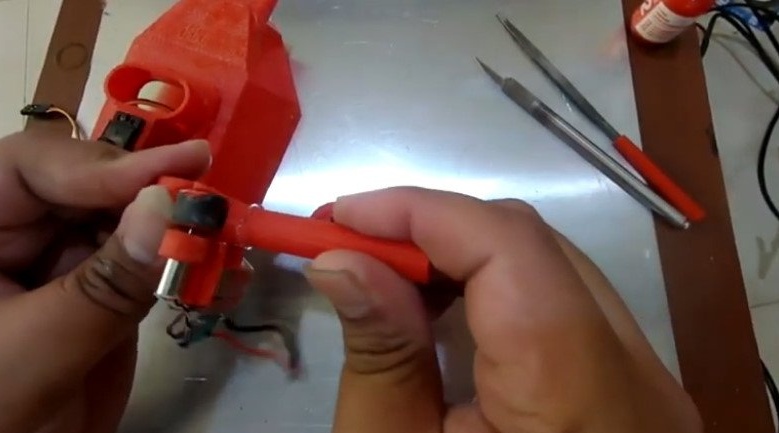

يربط الأسلاك ويجمع البرج.




يحمل قذائف ويتحقق من تشغيل البندقية. يمكن تعديل الآلية عن طريق تحريك الحامل على عمود المؤازرة.


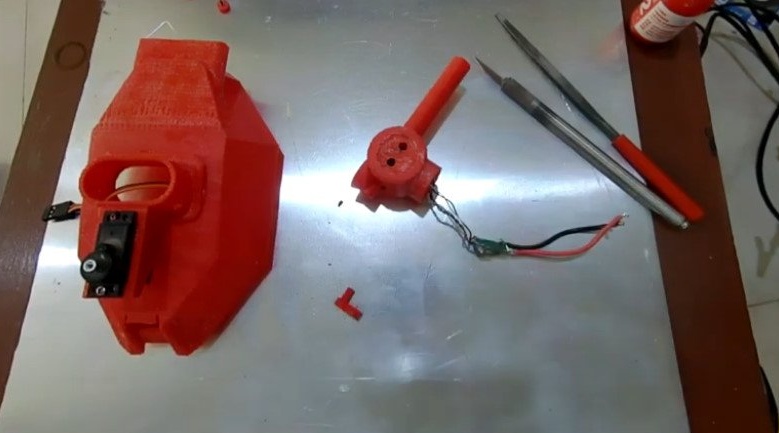
يجعل الاتصال النهائي والتجميع والتفتيش.




يمكن مشاهدة الفيديو مع تجميع البرج أدناه.
كل شيء جاهز. جمع واحد آخر مثل robopauk ويمكنك ترتيب معارك.
