

لاحظ القراء اليقظون أنه في مقالات Instructables تحت الاسم المستعار WilkoL حول شوكة ضبط وساعة باستخدامها ، يتم عرض عداد تردد واحد فقط ، وفي المقالة حول مولد مع زجاج كعنصر ضبط التردد ، تمت إضافة واحد آخر إليه ، حتى أنه حصل على KDPV. هذه القصة عنه.
أنا سعيد بالعمل محلية الصنع يبدأ المعلم بدراسة الجزء النظري ، أي باختيار طريقة قياس التردد. في العديد من مقاييس التردد ، يتم حساب عدد فترات إشارة الإدخال لفترة زمنية معينة ، على سبيل المثال ، ثانية واحدة:
هذه الطريقة جيدة للترددات العالية بما يكفي ، ولكن إذا كان التردد منخفضًا ، فإنها لا تسمح بالحصول على عدد كبير بما فيه الكفاية من المنازل العشرية. على سبيل المثال ، إذا كانت دورة القياس تستغرق ثانية واحدة ، فعند تردد بتردد 50 هرتز ، لن يكون هناك عدد عشري. تريد ، على سبيل المثال ، ثلاث علامات - هناك مخرج ، نقوم بتمديد دورة القياس إلى 1000 ثانية. ولكن الأمر يتباطأ عندما يتباطأ جهاز الكمبيوتر أو الهاتف الذكي ، والذي اعتاد عليه الجميع على الأقل ، وهو شيء آخر تمامًا - إذا انضم عداد التردد أيضًا إلى هذه الشركة الممتعة ، فإن هذا سيطرد المستخدم تمامًا من نفسه. بشكل عام ، هناك حاجة إلى طريقة أخرى. لكن ماذا لو قمنا بقياس فترة التذبذب هكذا؟
وكذلك افعل. خذ إشارة من التردد المرجعي ، الذي هو عدة مرات من حيث الحجم أعلى من المقاسة ، والنظر في عدد فترات الإشارة المرجعية التي ستمر في فترة واحدة من المقاسة. لذا ، على سبيل المثال ، بتردد مرجعي قدره 10 ميغاهيرتز وقياسه عند 50 هرتز ، سيكون هذا 200.000. وهذا يعني أن الفترة 20000.0 مللي ثانية ، ووحدة تحكم دقيقة حديثة (وبالمناسبة ، ليست كذلك) ، إذا "علمها" المبرمج ، مع يعيد حساب الفترة بسهولة إلى تردد يساوي 50،000 هرتز. إذا زاد التردد إلى 50.087 هرتز ، ثم في فترة واحدة من إشارة الإدخال ، 199650 تتناسب فترات مثالية ، ومثل هذا التغيير سيلاحظ عداد التردد في الوقت الحقيقي.
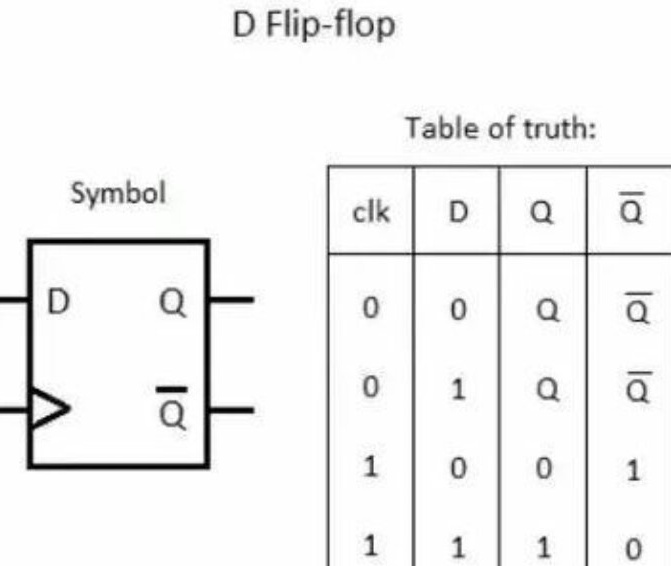
ولكن مع طريقة القياس هذه ، يتناقص عدد المنازل العشرية ، على العكس ، مع زيادة تردد إشارة الإدخال. على سبيل المثال ، إذا كان 40 كيلوهرتز ، ولا يزال المرجع المرجعي 10 ميجاهرتز ، عند 40-161 هرتز ، نحصل على 249 فترة من التردد المرجعي ، وعند 39840 هرتز - 251 فترات. يوجد على الأقل متران للترتيب: أحدهما للترددات العالية ، يعمل بالطريقة الأولى ، والآخر للترددات المنخفضة ، في الثانية. على الرغم - انتظر! أليس من الممكن دمج كلتا الطريقتين في عداد تردد واحد؟ يمكنك ، ويخبر السيد كيف. تحتاج إلى أخذ مشغل D عادي ، ثم يتم إعطاء رمزه وجدول الحقيقة:
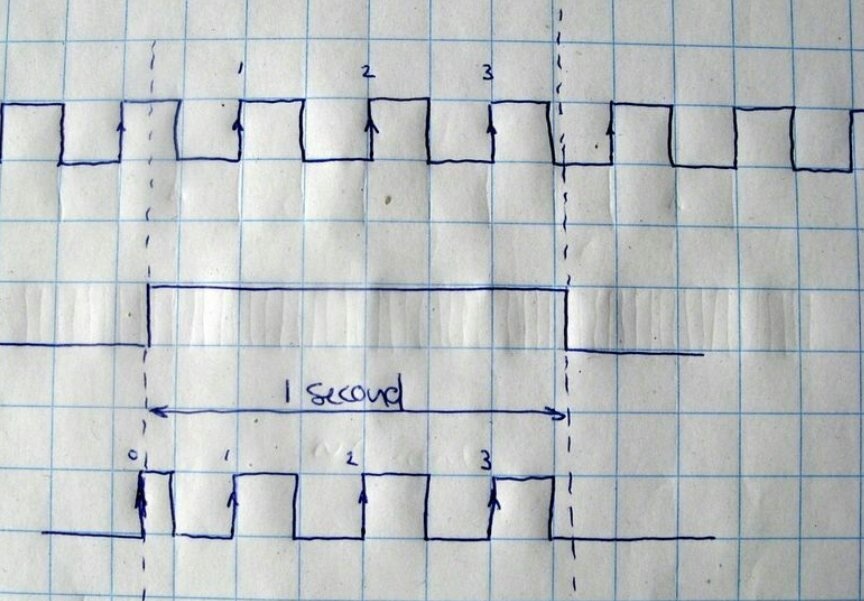
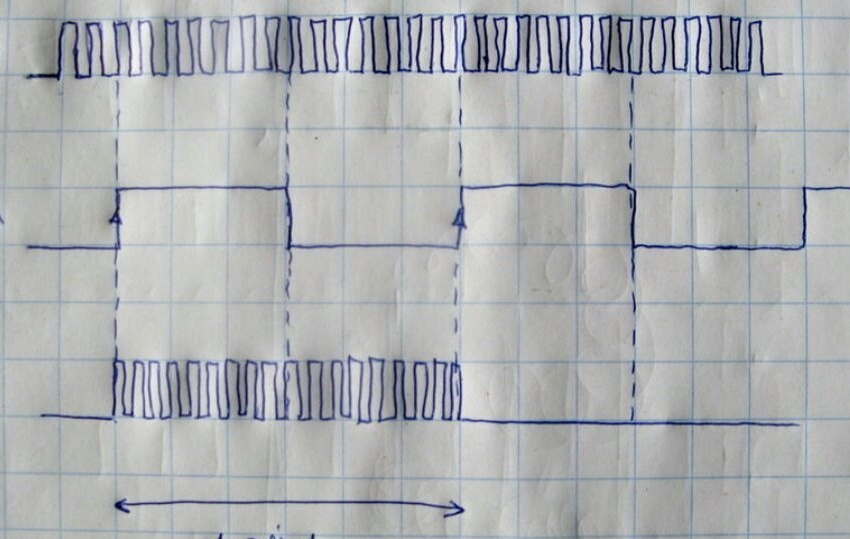
يُظهر المعالج أربع إشارات على الرسم البياني ، ينتج الرابع منها زنادًا:
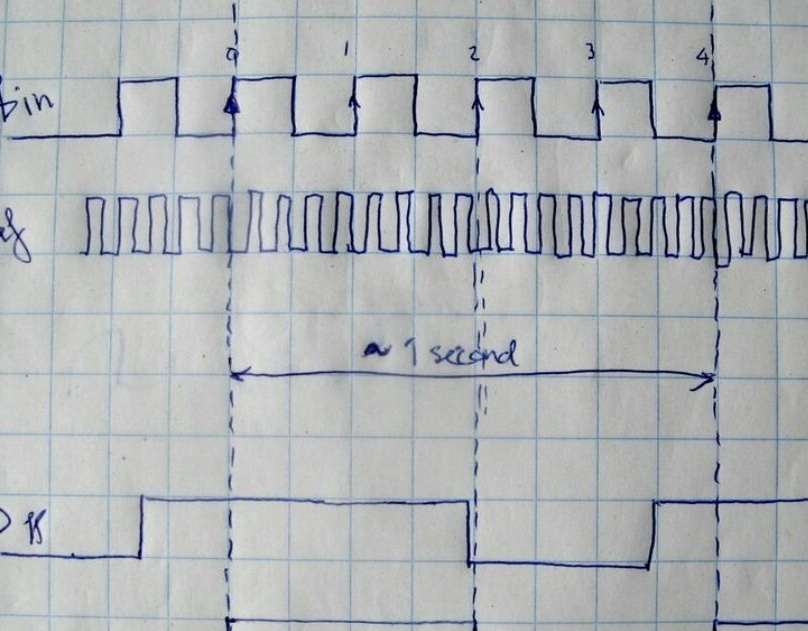
أول هذه الإشارات هو التردد المقاس ؛ حيث يتم تغذيته على إدخال الساعة في مشغل D. والثاني هو تردد مرجعي ، على سبيل المثال ، مرة أخرى بتردد 10 ميجا هرتز ، مما يتطلب استقرارًا عاليًا. والثالث هو إشارة بتردد بترتيب 1 هرتز ، لا يتطلب استقرارًا على الإطلاق ، ويتم تطبيقه على نفس المشغل عند الإدخال D. حسنًا ، والرابع يتم إنشاؤه بواسطة الزناد من الأول والثالث على النحو التالي. عندما تتحول الإشارة الثالثة من صفر إلى واحد ، لا يستجيب الزناد على الفور لهذا ، ولكن فقط عندما يحدث هذا التبديل مع الإشارة الأولى بعد ذلك. وهكذا ، تتطابق مقدمة إحدى نبضات الإشارة الرابعة تمامًا مع مقدمة إحدى نبضات الإشارة الأولى. ثم تتحول الإشارة الثالثة ، متبوعة بالإشارة الرابعة ، إلى الصفر ، والتي لا يتفاعل معها الميكروكونترولر بأي شكل من الأشكال ، ثم تتحول الإشارة الثالثة مرة أخرى إلى واحدة ، ولكن الزناد لا يتفاعل معها مرة أخرى على الفور ، ولكن فقط بعد نفس التبديل للإشارة الأولى. ومرة أخرى ، تتطابق جبهتا الإشارات الأولى والرابعة تمامًا. وفي الفترة الكاملة للإشارة الرابعة يناسب عددًا صحيحًا من فترات الأولى. علاوة على ذلك - مسألة فنية: لا تنس أن لدينا أيضًا إشارة ثانية. يحسب المتحكم عدد الفترات الكاملة للإشارات الأولى والثانية التي سقطت في الفترة الكاملة للرابع.
لذا ، حصلنا على رقمين. على سبيل المثال ، 32 و 10185892. اضرب 32 في 10،000،000 (التردد المرجعي) وقسمه على 10185892. نحصل على 31.416 هرتز. ثلاث خانات عشرية. ويظل القياس دقيقًا عند الترددات المنخفضة ، وعند الاقتراب من النموذج. وإذا كنت بحاجة إلى قياس الترددات الأعلى ، يمكنك إضافة مقسم.
الآن نحن بحاجة إلى تحديد أي متحكم لتشغيل عداد التردد. لقد حاول السيد بالفعل جعلها على ATmega328 ، وحتى على STM32F407 ، تعمل بتردد ساعة 168 ميجاهرتز. ولكن هذه المرة يشبع ببساطته ويقرر التحقق مما إذا كان يمكنه الحصول على نتيجة مماثلة على ATtiny2313.
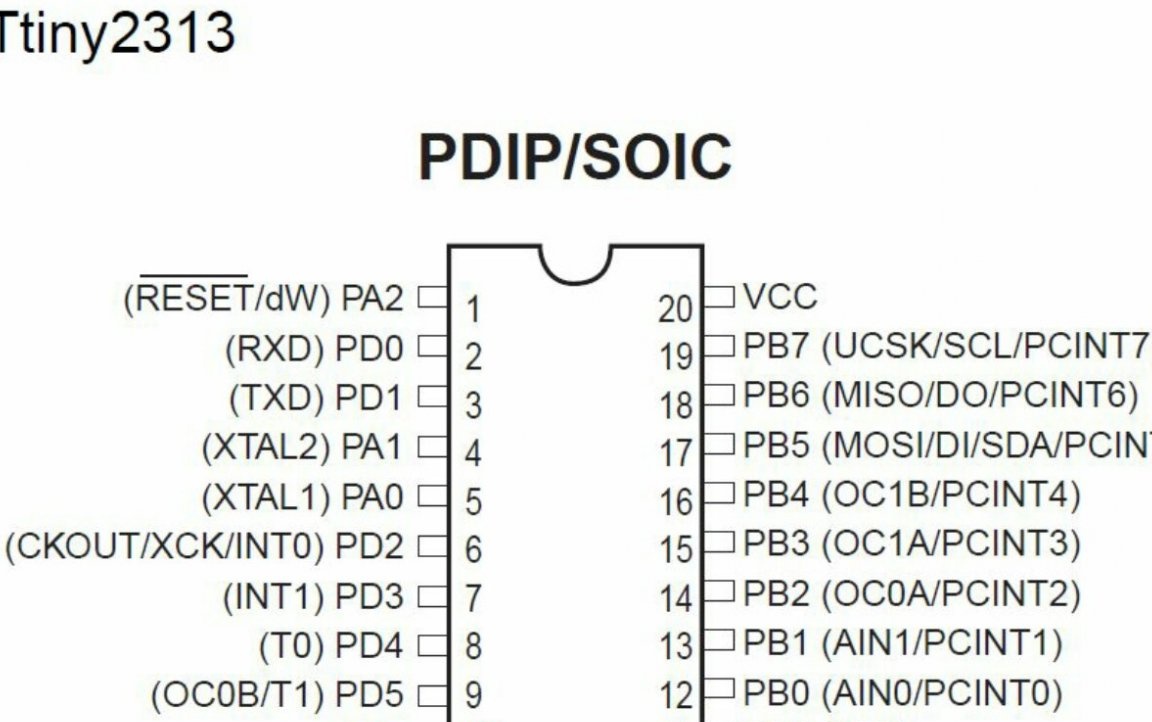
لديه أكثر من استنتاجات كافية ، خاصة إذا كنت تستخدم شاشة LED مع رقاقة سائق مدمجة مثل MAX7219:

يبدو مخطط الجهاز الكامل كما يلي:
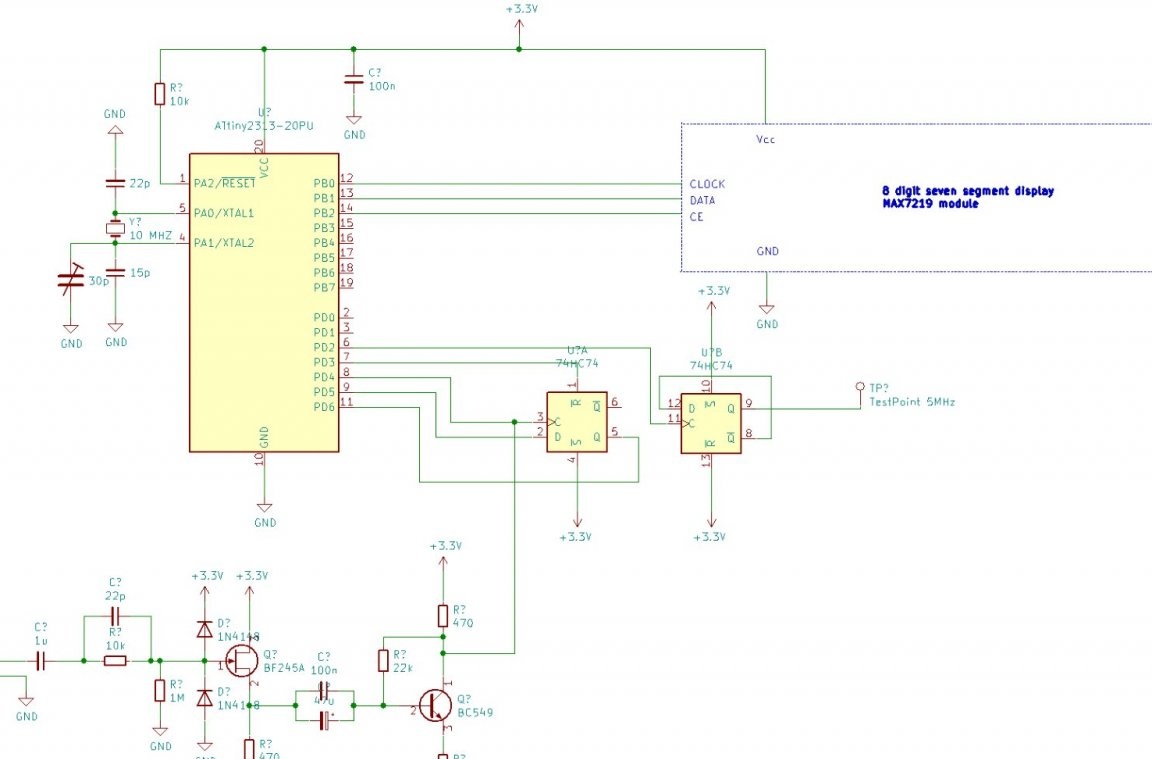
يتم استخدام محرك معقد إلى حد ما للمكونات المنفصلة ، التي تحتوي على دوائر RC ، ومحدد الصمام الثنائي ، ومراحل مكبر الصوت ، للحصول على نبضات مستطيلة من إشارة من أي شكل تقريبًا. يقع الزناد D في الخارج ، ويتم توفير إشارة التردد المقيسة (أولاً) من السائق ، ويتم استقبال الإشارات بترددات 10 ميجاهرتز و 1 هرتز (الثاني والثالث على التوالي) من وحدة التحكم الدقيقة ، وتعود إشارة الخرج (الرابعة) إلى وحدة التحكم الدقيقة. يعمل الزناد الثاني من هذا القبيل على توليد إشارة عند نقطة تحكم. يتوفر مخطط PDF نفسه في أرشيف ZIP. هنا.
بعد تجميع الرسم التخطيطي ، يقوم المعلم بجمع مقياس التردد عليه ، وتبين كما يلي:
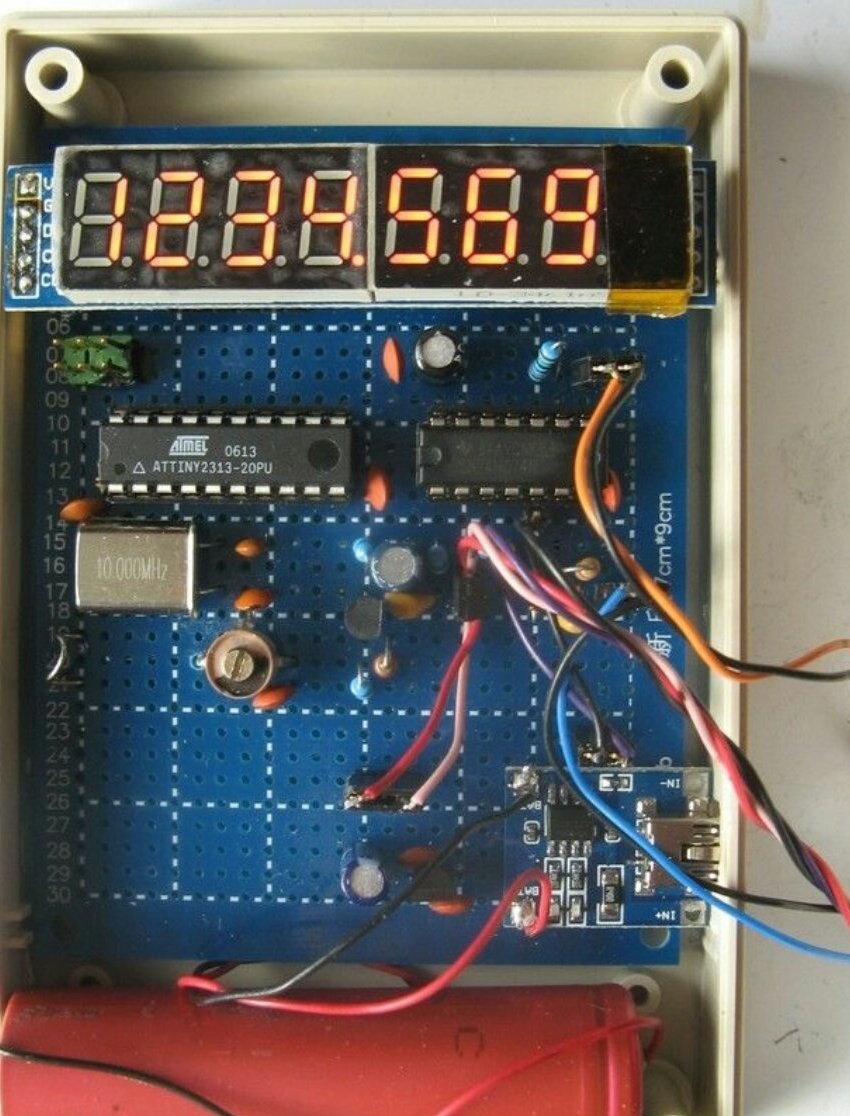
في الصورة ، على عكس الدائرة ، يتم عرض البطارية وجهاز التحكم في الشحن ، كما ذكر المعلم استقرار النبض ، ولكن في مكان وجوده ، فإنه غير مرئي. تمت إضافة جميع هذه المكونات لاحقًا ، مما جعل العمل باستخدام مقياس التردد أكثر ملاءمة. يجب أن تؤخذ بطارية 18650 مع الحماية ، أسلاك اللحام إليها غير مقبولة. إما المقصورة أو لحام البقعة.
البرامج الثابتة (الأكاذيب هنا أيضًا في أرشيف ZIP) يكتب السيد مع الأخذ في الاعتبار الحاجة إلى نقل وحدة التحكم الدقيقة من الساعة إلى مولد RC للعمل من الكوارتز الخارجي ، بالإضافة إلى إمكانية تعيين وظائف مختلفة لكل من مخرجات الدائرة الدقيقة:
لتحميل البرنامج الثابت ، يأخذ المعالج مبرمجًا في الدائرة من Olimex. هذه شركة بلغارية لها ملف تعريف قريب من Adafruit.

يختم التفريغ الرئيسي أقل جزء على الشاشة ، ثم يقطع ثقبًا في غطاء السكن بحيث يتم إغلاق هذا التصريف ، لأن قراءاته كانت غير دقيقة على الرغم من جميع الإجراءات المتخذة.يتأثر هذا بخصائص الخوارزمية ، وعدم استقرار درجة حرارة عالية جدًا لمذبذب الكريستال. لإعداده ، يقوم المعلم بتوصيل مقياس تردد خارجي بنقطة التحكم مع تثبيت التردد لمولد الساعة من جهاز استقبال GPS ، وبعد ذلك يقوم بتعيين 5 MHz بالضبط عن طريق تحويل مكثف التوليف (الزناد يقسم تردد الساعة على اثنين). يوفر مقياس التردد المضبوط بشكل صحيح الدقة المطلوبة في نطاق الترددات المقاسة من 0.2 هرتز إلى 2 ميجاهرتز. توضح الصورتان التاليتان كيف قام المعلم بتطبيق نفس الإشارة في وقت واحد على العدادات المرجعية ومرات التردد التي تم التحقق منها:

