
عاكس 12-220 فولت على اردوينو جيب نقي بكود البرنامج الكامل.
النظرية
إن تحقيق إخراج موجة جيبية أمر صعب للغاية ولا يمكن التوصية به للعاكسون ، لأنه إلكتروني لا تحب الأجهزة عادةً زيادة التيارات أو الفولتية بشكل كبير. نظرًا لأن العاكسون يتم تصنيعها بشكل أساسي باستخدام الأجهزة الإلكترونية ذات الحالة الصلبة ، فعادة ما يتم التخلص من شكل موجة جيبية.
أجهزة الطاقة الإلكترونية عند العمل مع الموجات الجيبية تعطي نتائج غير فعالة ، حيث يتم تسخين الأجهزة ، كقاعدة عامة ، بالمقارنة مع النبضات المستطيلة.
وبالتالي ، فإن أفضل خيار لتنفيذ موجة جيبية على العاكس هو PWM ، مما يعني تعديل عرض النبضة أو PWM.
PWM هي طريقة محسنة (نسخة رقمية) للتعرض لأشكال الموجة الأسية من خلال عرض نبضات مربعة متغيرة نسبيًا ، والتي يتم حساب قيمتها الصافية وفقًا تمامًا للقيمة الصافية لشكل الموجة الأسية المحددة ، وهنا تشير القيمة "الصرفة" إلى قيمة RMS. لذلك ، يمكن استخدام PWM المحسوب مع الإشارة إلى موجة جيبية معينة كمكافئ مثالي لتكرار موجة جيبية معينة. بالإضافة إلى ذلك ، ستكون PWMs متوافقة بشكل مثالي مع أجهزة الطاقة الإلكترونية (mosfets ، BJTs ، IGBTS) وتسمح باستخدامها مع الحد الأدنى من الحرارة.
ما هي SPWM؟
الطريقة الأكثر شيوعًا هي إنتاج موجة جيبية PWM (موجة جيبية) أو SPWM ، من خلال تطبيق العديد من الإشارات المتغيرة بشكل كبير لإدخال مضخم تشغيل للمعالجة اللازمة. من بين إشارتي الإدخال ، يجب أن يكون أحدهما أعلى في التردد مقارنة بالإشارة الأخرى.
باستخدام إشارتي إدخال
كما ذكر في القسم السابق ، يتضمن الإجراء توفير إشارتين متغيرين بشكل كبير لمدخلات مضخم التشغيل.
هنا ، يتم تكوين مكبر الصوت التشغيلي كمقارن نموذجي ، لذلك يمكننا أن نفترض أن مكبر الصوت التشغيلي سيبدأ على الفور في مقارنة مستويات الجهد اللحظي لهاتين الإشارتين المتراكبتين في اللحظة التي تظهر فيها أو يتم تطبيقها على مدخلاته.
من أجل أن يقوم مكبر الصوت التشغيلي بتنفيذ PWM الجيبي اللازم عند خرجه بشكل صحيح ، فمن الضروري أن يكون لإحدى الإشارات تردد أعلى بكثير من الآخر. التردد الأبطأ هنا هو ذلك الذي يجب أن يكون الموجة الجيبية للعينة ، والتي يجب محاكاتها (تكرارها) بواسطة PWMs.
من الناحية المثالية ، يجب أن تكون كلتا الإشارات جيبية (واحدة ذات تردد أعلى من الآخر) ، ومع ذلك ، يمكن تحقيق نفس الشيء عن طريق تضمين موجة مثلثة (تردد عالي) وموجة جيبية (موجة انتقائية بتردد منخفض). كما يمكن رؤيته في الصور التالية ، يتم دائمًا تغذية الإشارة عالية التردد إلى الإدخال العاكس (-) لمكبر الصوت التشغيلي ، بينما يتم توفير إشارة جيبية أبطأ أخرى إلى الإدخال غير العاكس (+) لمكبر الصوت التشغيلي. في أسوأ الحالات ، قد تكون كلتا الإشارات موجات مثلثة بمستويات تردد موصى بها ، كما هو موضح أعلاه. ومع ذلك ، سيساعد ذلك في تحقيق مكافئ جيد بشكل معقول لموجة PWM.
وتسمى إشارة ذات تردد أعلى إشارة حامل ، بينما تسمى إشارة عينة أبطأ إدخال تعديل.
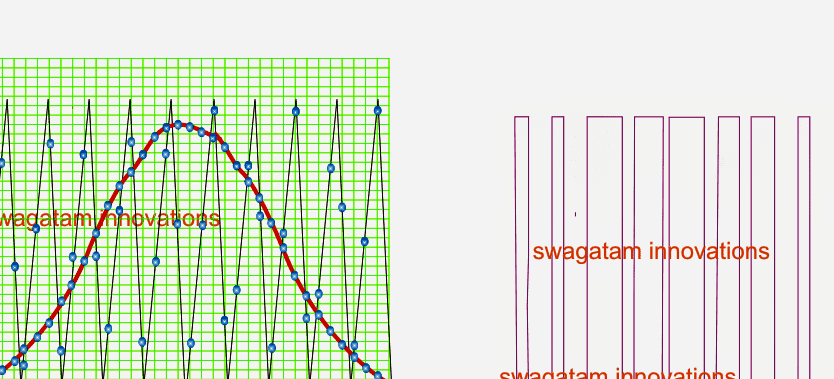
إنشاء SPWM مع موجة وترية مثلثة
بالإشارة إلى الشكل أعلاه ، من الممكن أن تتخيل بوضوح من خلال النقاط المرسومة نقاط الجهد المختلفة المتزامنة أو المتداخلة للإشارتين لفترة زمنية معينة. يوضح المحور الأفقي الفترة الزمنية لشكل الموجة ، بينما يوضح المحور الرأسي مستويات الجهد 2 قيد التشغيل في نفس الوقت ، شكل الموجة المتراكب. يخبرنا الشكل عن كيفية استجابة مكبر الصوت التشغيلي لمستويات الجهد اللحظية المتزامنة الموضحة للإشارتين وإنتاج PWM متغيّر في المقابل في خرجه. يقارن مضخم تشغيلي (op-amp) ببساطة مستويات الجهد لموجة مثلث سريعة تغير على الفور موجة جيبية (يمكن أن تكون أيضًا موجة مثلثية) ، ويتحقق من الحالات التي يمكن أن يكون فيها جهد الموجة المثلثية أقل من جهد الموجة الجيبية ويستجيب على الفور إنشاء منطق مرتفع على مخارجك.
يتم الحفاظ على هذا طالما أن الموجة المحتملة من المثلث لا تزال أقل من إمكانات الموجة الجيبية ، وفي اللحظة التي يتم فيها الكشف عن إمكانات الموجة الجيبية لتكون أقل من الإمكانات الآنية لموجة المثلث ، تعود المخرجات بحد أدنى وتتحمل حتى تتكرر الحالة.
تؤدي هذه المقارنة المستمرة للمستويات المحتملة لحظيًا من شكلين موجيين متراكبين عند مدخلي مكبرات الصوت التشغيلية إلى إنشاء PWMs متغيرة بشكل مماثل ، والتي يمكن أن تكرر بدقة الشكل الجيبي المطبق على الإدخال غير العاكس لمكبر الصوت التشغيلي.
مكبر العمليات و SPWM
يوضح الشكل التالي النمذجة العملية المذكورة أعلاه:
يمكننا هنا أن نلاحظ كيف يتم تنفيذه عمليًا ، وهذه هي الطريقة التي سيعمل بها مكبر الصوت التشغيلي (على الرغم من ذلك بسرعة أعلى بكثير ، في MS).
العملية واضحة تمامًا وتبين بوضوح كيف يجب أن يعالج مضخم التشغيل الموجة الجيبية PWM من خلال مقارنة إشارتين متغيرين في وقت واحد عند مدخلاته ، كما هو موضح في الأقسام السابقة.
في الواقع ، سيقوم مضخم التشغيل بمعالجة PWM الجيبي بشكل أكثر دقة من المحاكاة الموضحة أعلاه ، يمكن أن يكون أفضل 100 مرة ، مما يؤدي إلى إنشاء PWM متناسق للغاية ومقاس جيدًا يطابق العينة المقدمة. موجة جيبية.
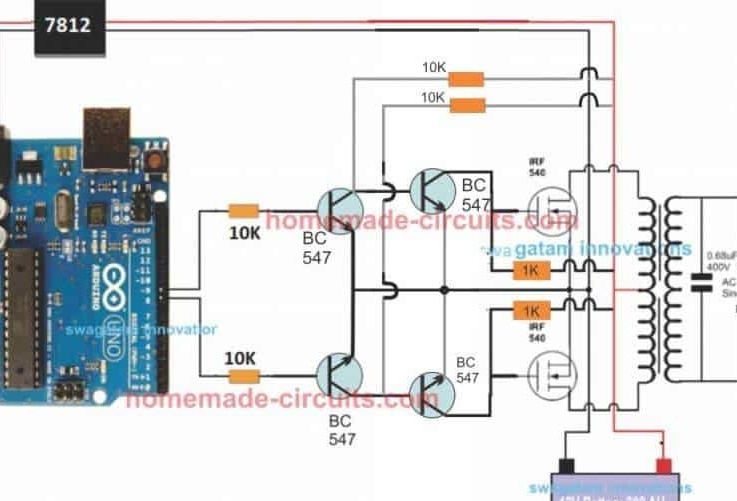
اردوينو العاكس دائرتين
قائمة الأجزاء
جميع المقاومات 1/4 وات ، 5٪ CFR
• 10 ك = 4
• 1 ك = 2
• BC547 = 4 قطع
• MOSFETs IRF540 = 2 قطعة
• اردوينو UNO = 1
• محول = 9-0-9V / 220V / 120V.
• البطارية = 12 فولت
جميع المقاومات 1/4 وات ، 5٪ CFR
• 10 ك = 4
• 1 ك = 2
• BC547 = 4 قطع
• MOSFETs IRF540 = 2 قطعة
• اردوينو UNO = 1
• محول = 9-0-9V / 220V / 120V.
• البطارية = 12 فولت
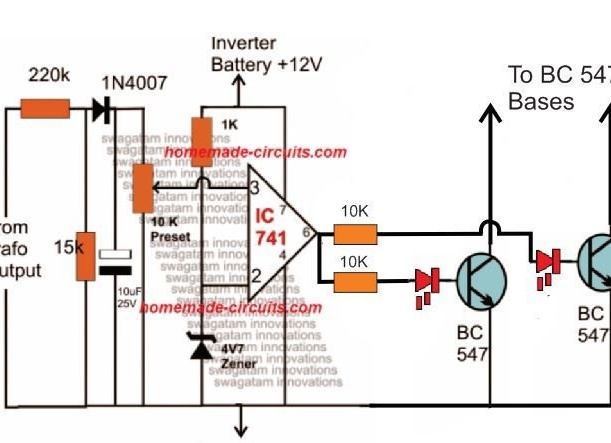
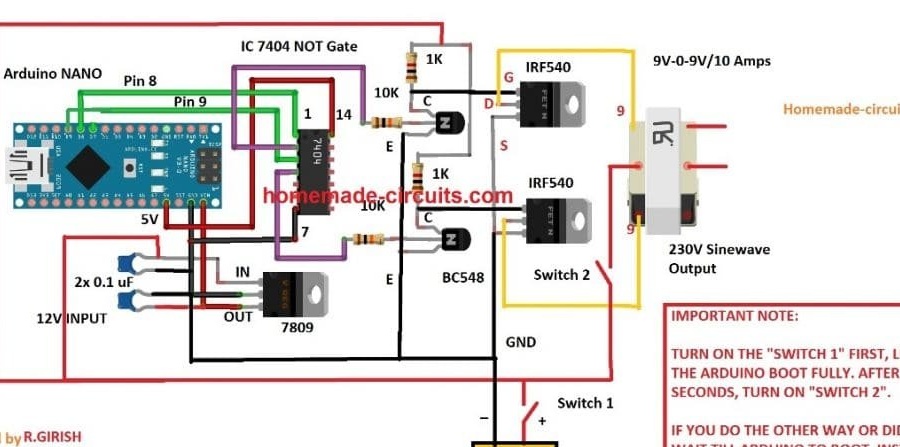
التصميم في الواقع بسيط للغاية ، كما هو موضح في الشكل التالي.
دبوس رقم 8 ودبوس رقم 9 إنشاء PWM بالتناوب وتبديل Mosfets بنفس PWM.
يقوم Mosfet ، بدوره ، بتحريض شكل موجة SPWM عالي التيار على المحول ، باستخدام طاقة البطارية ، مما يجعل المحول الثانوي ينتج شكل موجة متطابق.
يمكن ترقية دائرة Arduino inverter المقترحة إلى أي مستوى طاقة أعلى مفضل عن طريق استبدال Mosfets والمحول ، على التوالي ، كبديل ، يمكنك أيضًا تحويل هذا إلى جسر كامل أو عاكس موجة جيبية H
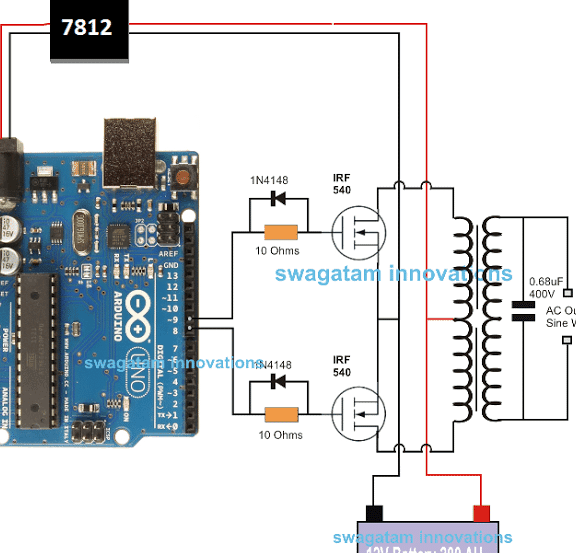
اردوينو طاقة المجلس
صور الموجي ل Arduino SPWM
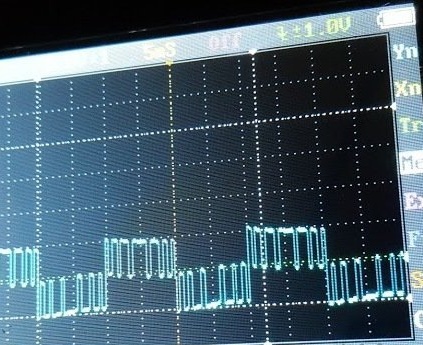
نظرًا لأن Arduino سينتج خرجًا بجهد 5 فولت ، فقد لا يكون هذا مثاليًا للتحكم المباشر في ترانزستورات MOS.
لذلك ، من الضروري رفع مستوى القوية إلى 12V حتى تعمل Mosfets بشكل صحيح دون تسخين الأجهزة.
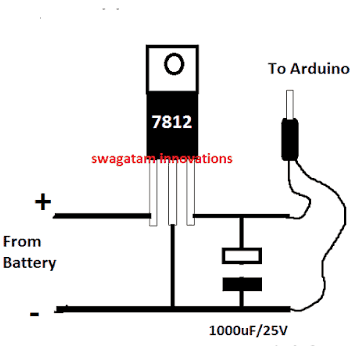
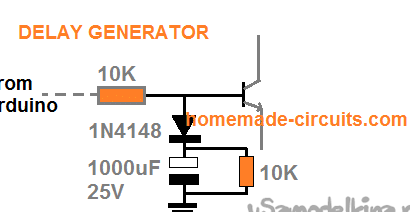
للتأكد من أن Mosfety لا يبدأ عند بدء تشغيل Arduino أو تشغيله ، تحتاج إلى إضافة مولد التأخير التالي وتوصيله بقاعدة الترانزستورات BC547 ، وهذا سيحمي Mosfets ويمنعها من الاحتراق أثناء تبديل الطاقة وعند تشغيل Arduino.
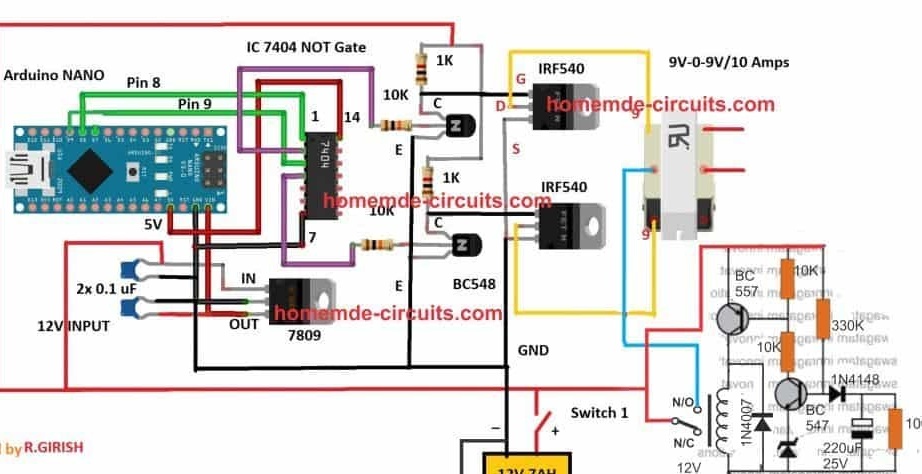
إضافة منظم جهد كهربائي
تمامًا مثل أي عاكس آخر ، عند إخراج هذا التصميم ، يمكن أن يرتفع التيار إلى حدود غير آمنة عندما تكون البطارية مشحونة بالكامل.
للتحكم في ذلك ، أضف منظم جهد تلقائي.
يجب توصيل جامعي BC547 بقواعد زوج BC547 الأيسر ، والمتصلة بـ Arduino عبر مقاومات 10K.
الإصدار الثاني من العاكس باستخدام شريحة sn7404 / k155ln1
هام:
لتجنب التشغيل العرضي قبل تحميل Arduino ، يمكن تضمين تأخير بسيط في دائرة المؤقت في التصميم أعلاه ، كما هو موضح أدناه:
كود البرنامج:
/ *
اعتمد هذا الرمز على رمز Swagatam SPWM مع التغييرات التي تم إجراؤها لإزالة الأخطاء. استخدم هذا الرمز كما لو كنت تستخدم أي أعمال أخرى من Swagatam.
مخاطر أتون 2017
* /
const int sPWMArray [] = {500،500،750،500،1250،500،2000،500،1250،500،750،500،500} ؛ // هذا هو الصفيف مع تغيير قيم SPWM حسب الرغبة
const int sPWMArrayValues = 13 ؛ // أنت بحاجة إلى هذا نظرًا لأن C لا يمنحك طول مصفوفة
// الدبابيس
const int sPWMpin1 = 10 ؛
const int sPWMpin2 = 9 ؛
// يبدل الدبوس
bool sPWMpin1Status = صحيح ؛
bool sPWMpin2Status = صحيح ؛
إعداد باطل ()
{
pinMode (sPWMpin1 ، OUTPUT) ؛
pinMode (sPWMpin2 ، OUTPUT) ؛
}}
حلقة فارغة ()
{
// Loop لـ pin 1
for (int i (0)؛ i! = sPWMArrayValues؛ i ++)
{
إذا (sPWMpin1Status)
{
الكتابة الرقمية (sPWMpin1 ، عالية) ؛
تأخير ميكروثانية (sPWMArray [i]) ؛
sPWMpin1Status = false ،
}}
آخر
{
الكتابة الرقمية (sPWMpin1 ، LOW) ؛
تأخير ميكروثانية (sPWMArray [i]) ؛
sPWMpin1Status = صحيح ؛
}}
}}
// Loop لـ pin 2
for (int i (0)؛ i! = sPWMArrayValues؛ i ++)
{
إذا (sPWMpin2Status)
{
الكتابة الرقمية (sPWMpin2 ، عالية) ؛
تأخير ميكروثانية (sPWMArray [i]) ؛
sPWMpin2Status = false ،
}}
آخر
{
الكتابة الرقمية (sPWMpin2 ، LOW) ؛
تأخير ميكروثانية (sPWMArray [i]) ؛
sPWMpin2Status = صحيح ؛
}}
}}
}}حظ موفق.