مشيه مشابه جدا للصرصور الحقيقي. عند المشي ، يتأرجح قليلاً بخطوة إلى الأمام بثقة. يحتوي الصرصور على الحد الأدنى من الأجزاء المعقدة ومن السهل جدًا تصنيعه.
1. اختبار الفيديو
يظهر الفيديو صرصور ميكانيكي من زوايا مختلفة أثناء تشغيله وحركته.
2. الخصائص والمميزات.
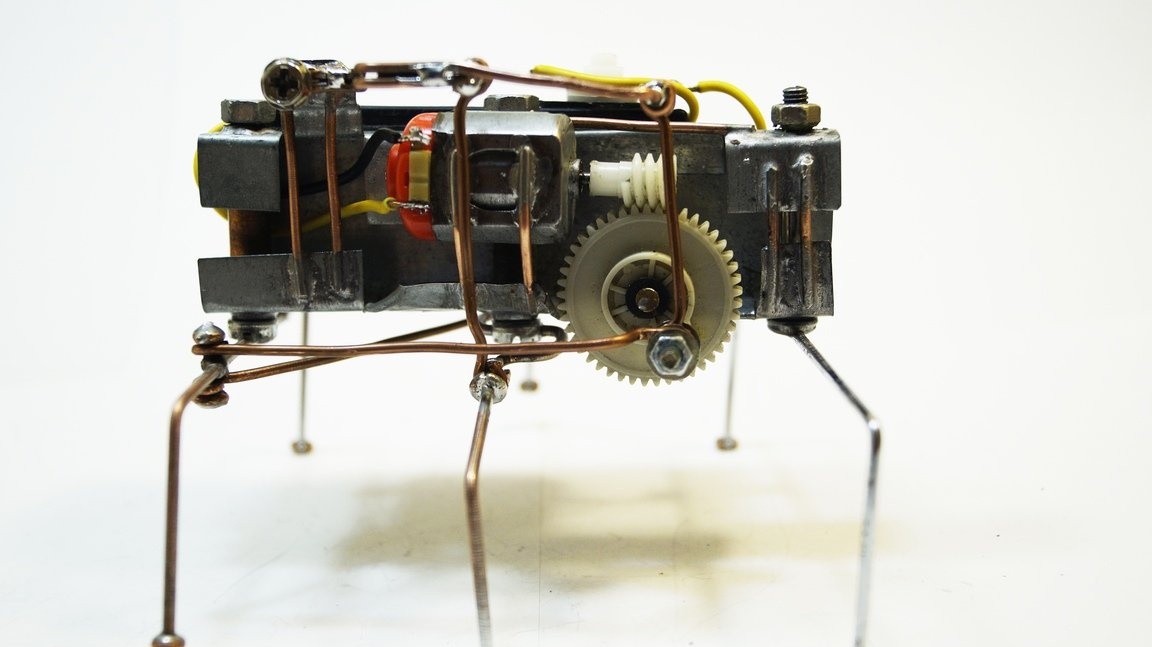
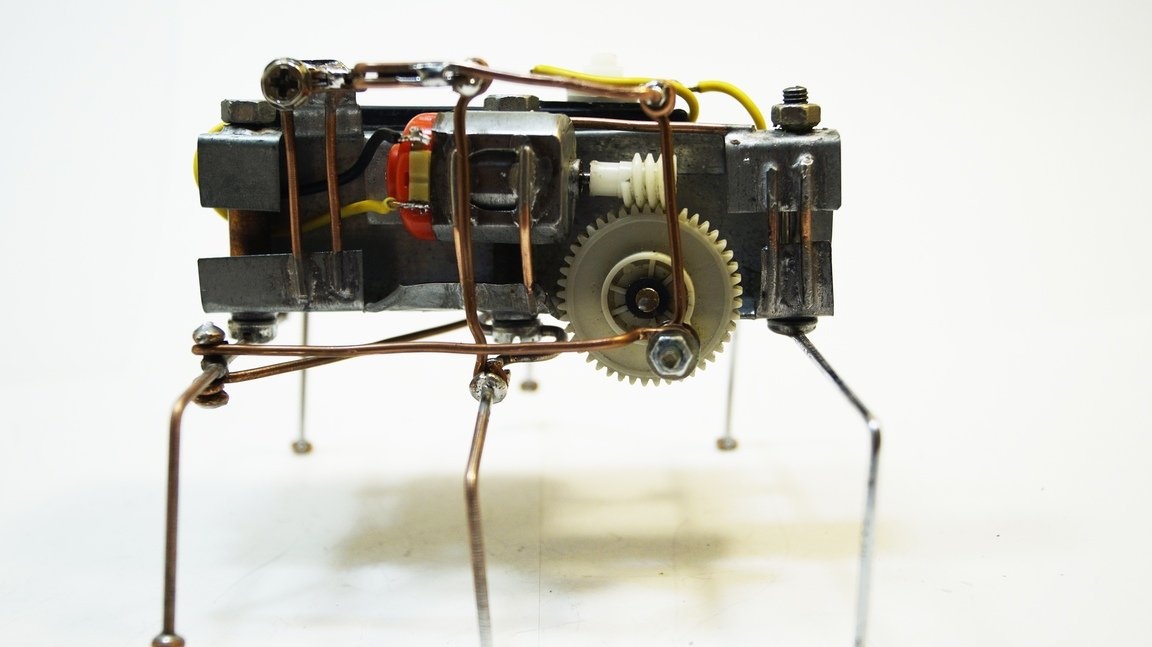
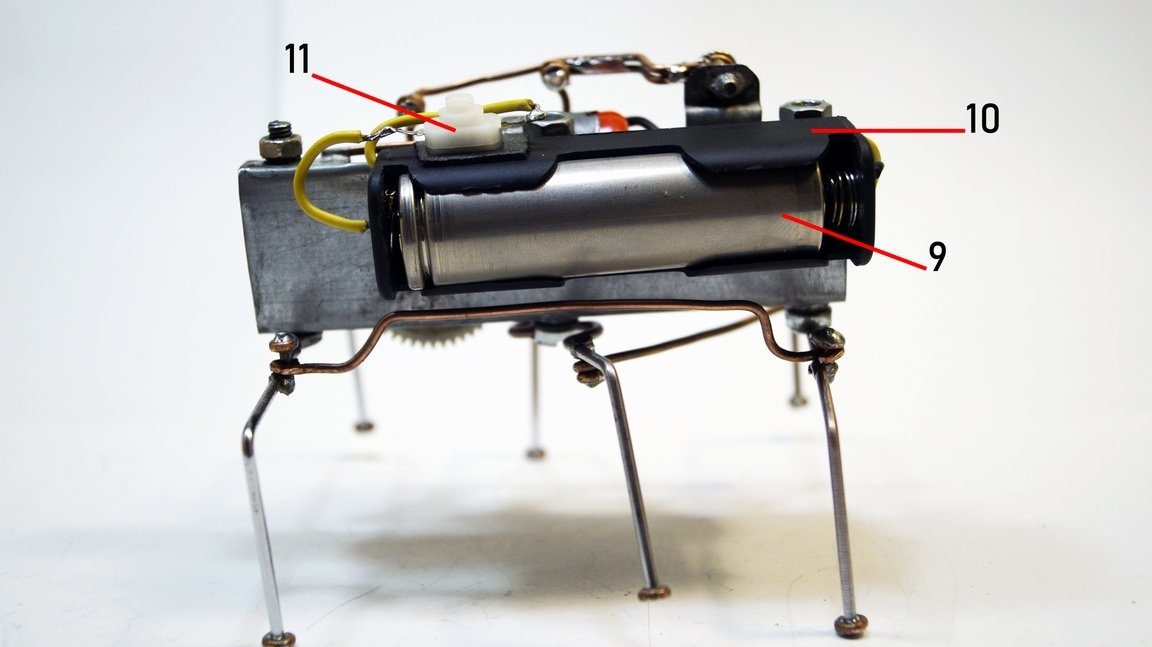
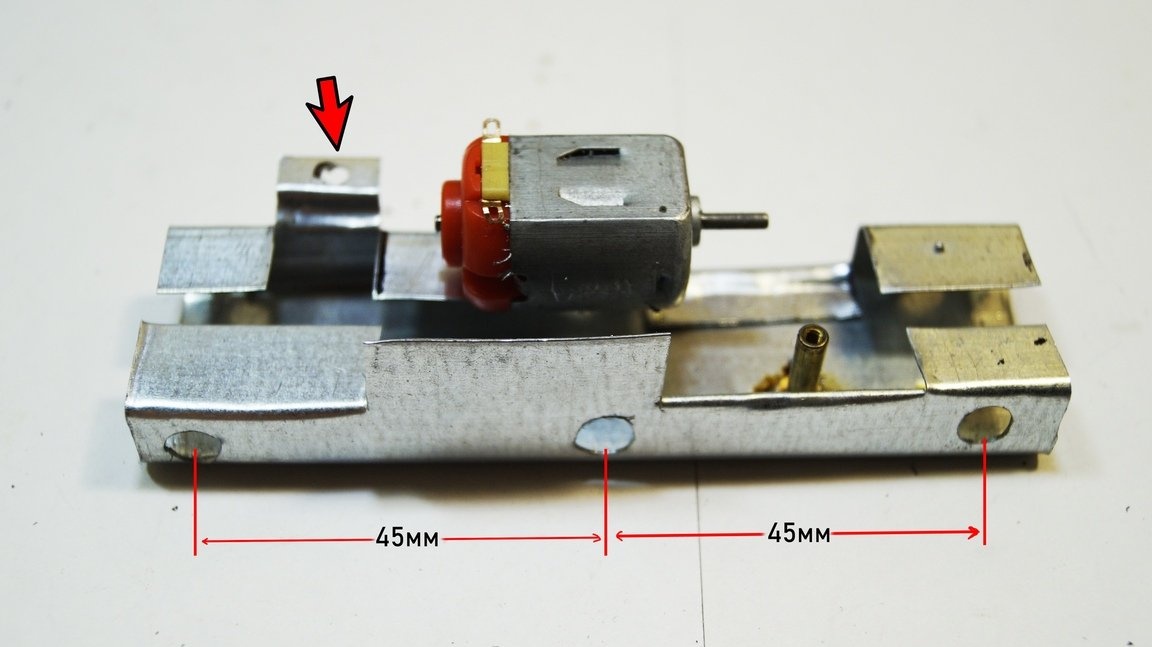
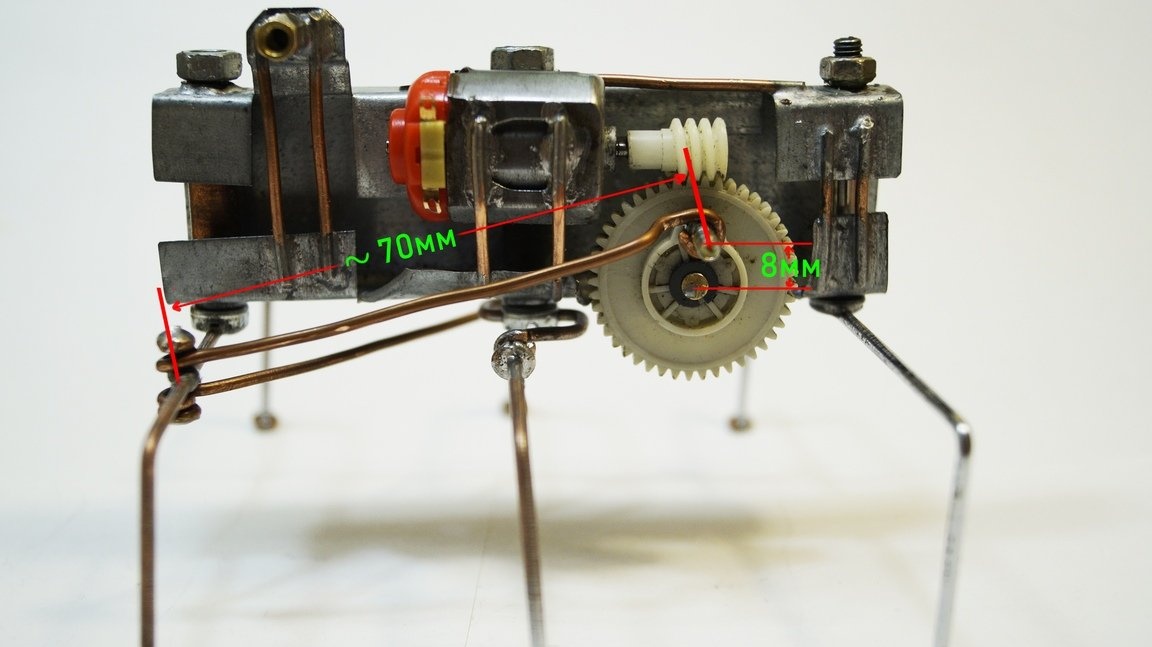
في الصورة 1. يظهر الصرصور الميكانيكي ، المنظر الجانبي. على صورة 2. يتم عرض المنظر العلوي.
الصورة 1.
الصورة 2.
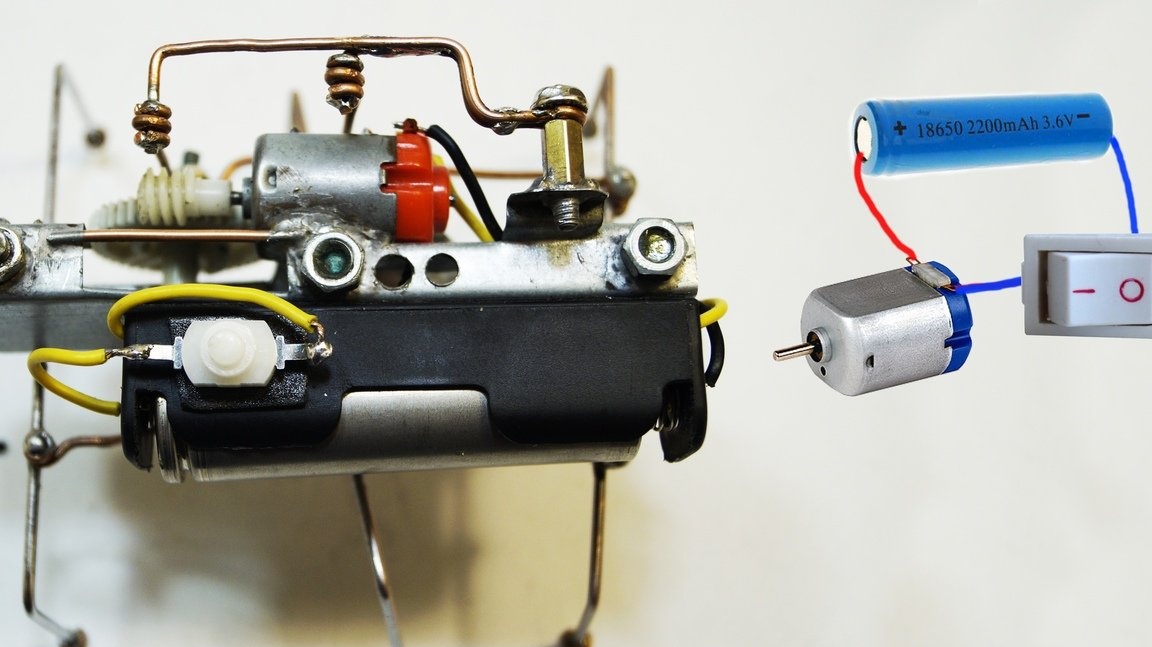
التصميم كإطار ، تم استخدام ملف التعريف ppn-2 30X20. تم تركيب المحرك والمفاصل الأخرى عن طريق اللحام. يتم تثبيت أقدام الصرصور بمسامير M6. يتم لصق زر الطاقة وحجرة البطارية على شريط مزدوج الجوانب. كجر لقيادة أرجل الصرصور ، تم استخدام كبل نحاسي بقسم 2.5 مم.
السيارات والبطاريات. المحرك ومحور الكرنك ملحومان بالإطار على POS-61 ، حامض اللحام ZnCl (كلوريد الزنك). لزيادة عزم الدوران وتقليل الحجم ، تم استخدام ترس دودة.
التغذية. تم استخدام بطارية 18650 كقوة للروبوت ، ومصدر الطاقة 3.7 فولت.
تفاصيل تصميم الروبوت
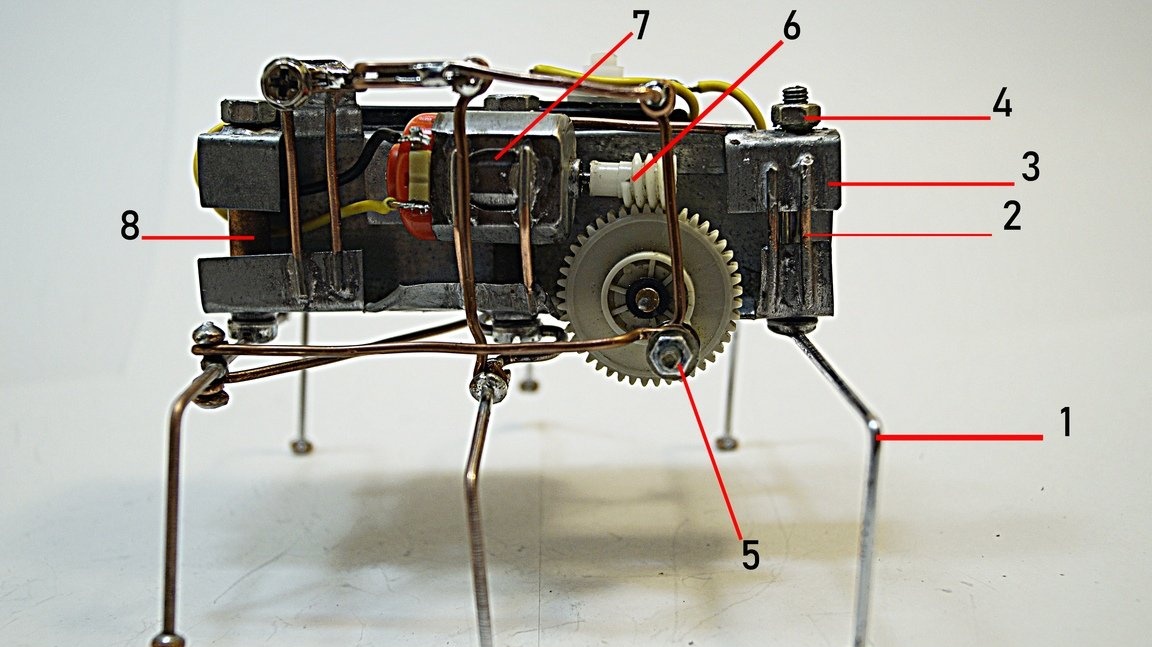
1. الكفوف الصرصور.
2. تقوية.
3. الإطار.
4. محور أقدام الصرصور.
5. آلية كرنك.
6. محرك دودة.
7. محرك كهربائي F130 5 V.
8. محور الكم لمخالب الصراصير.
9. نوع البطارية 18650 ، 3.7 فولت.
10. حجرة البطارية.
11. زر الطاقة.
3. مبدأ العمل.
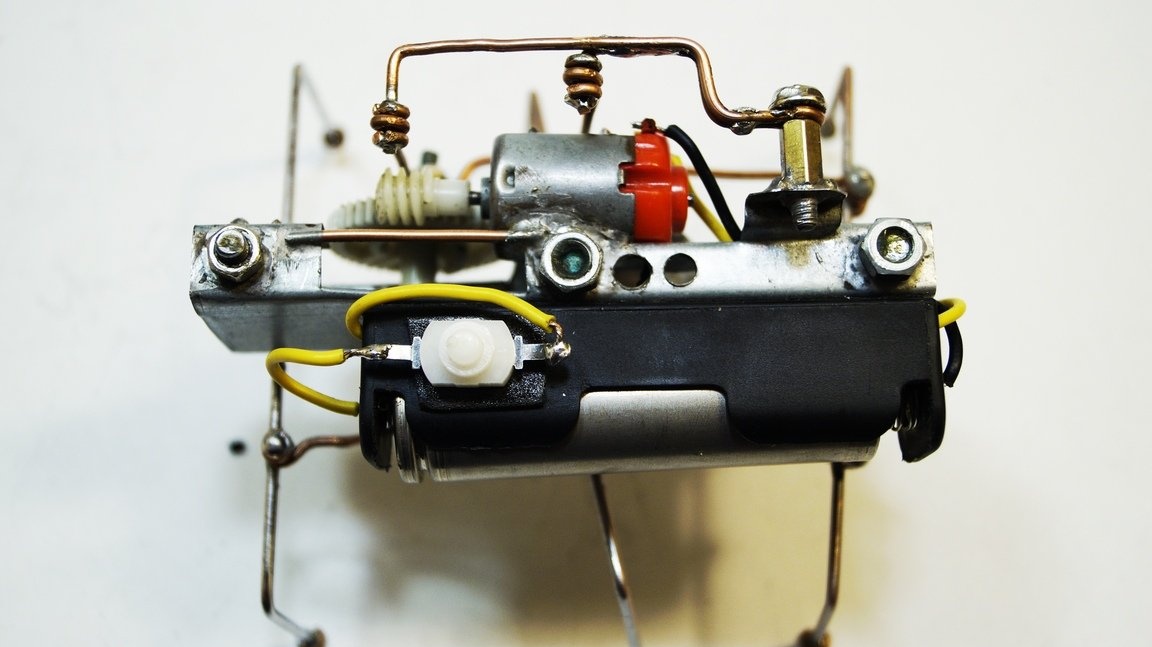
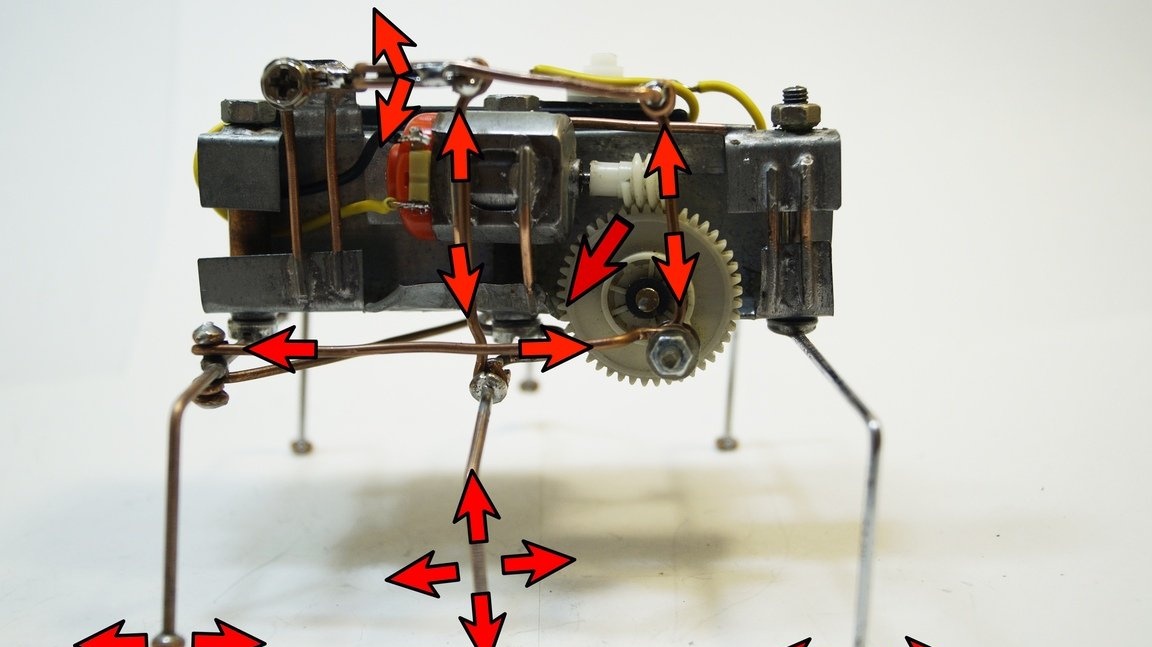
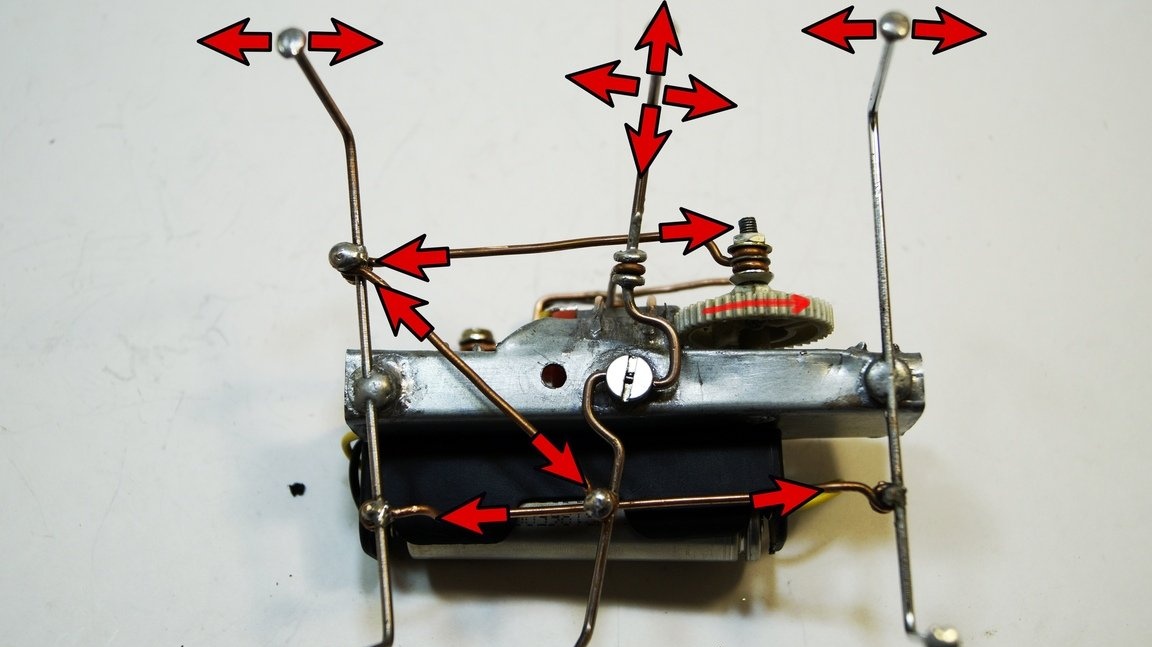
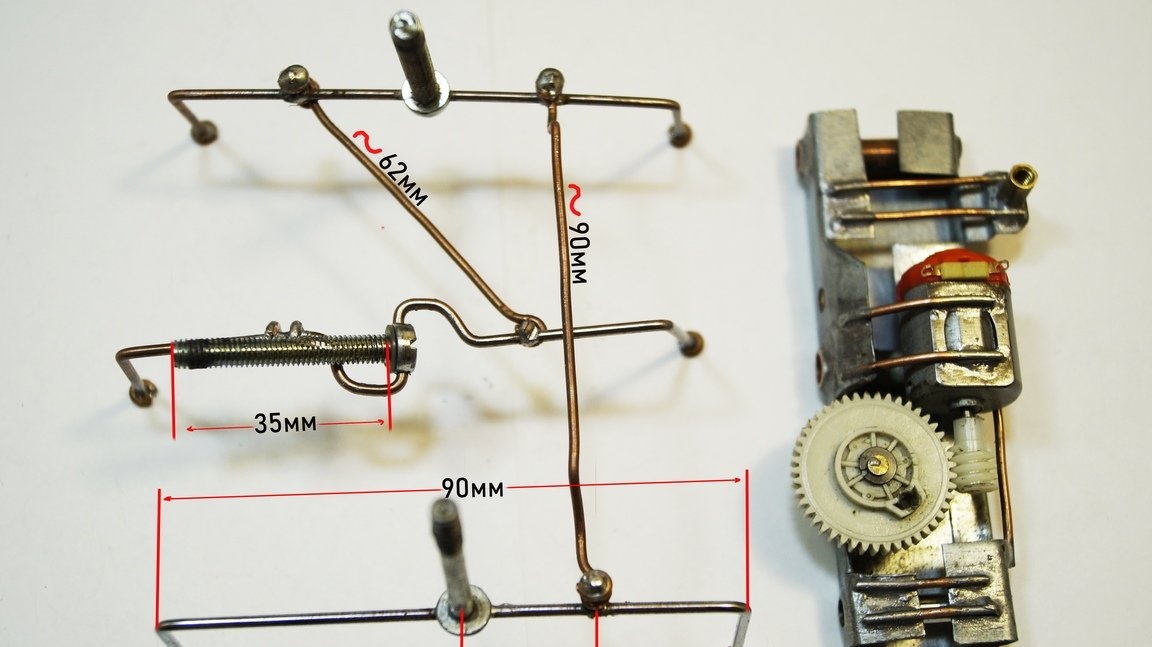
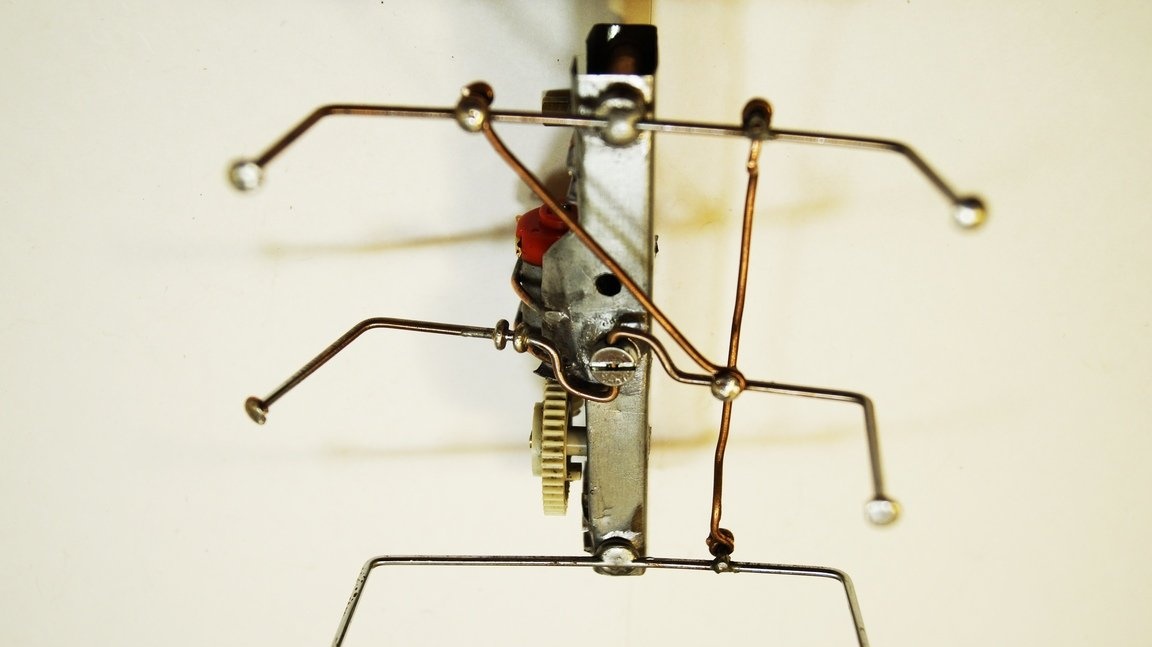
في الصورة 3. 4. يظهر مبدأ عمل الأجزاء الميكانيكية للصراصير. من الجدير بالذكر أن الأرجل الأمامية والخلفية للروبوت تتحرك أفقيًا ، وأن الأرجل الوسطى تتحرك رأسيًا وأفقيًا.
يتم توفير الطاقة للمحرك الكهربائي من خلال المفتاح ، ويقوم المحرك بتدوير آلية الكرنك. يقوم الكرنك بتحريك المخلب الأمامي من خلال الجر ، على التوالي ، من المخلب الأمامي ، ويدفع الدفع المخلب الخلفي (تتحرك بشكل متزامن). يتم توصيل الزوج الأوسط من الكفوف بالزوج الأول ، بالعرض (يتحركون في الطور المضاد).
لتحريك الزوج الأوسط من الكفوف عموديًا ، يتم تركيب ذراع فوق المحرك ، والذي يتم تحريكه من آلية الكرنك.
صورة 3
صورة 4
4. المواد والأدوات.
1. لحام الحديد 50 واط.
2. حجرة البطارية.
3.Prysoy POS-61.
4. سلك نحاسي بقسم 2.5 مم.
5. حمض اللحام ZnCl (كلوريد الزنك)
6. محرك كهربائي F130 5V.
7. مقص للمعادن.
8. محرك دودة.
9. كماشة.
10. انبوب صلب قطر 80 مم.
11. بطارية قابلة للشحن 18650.
12.ملف PPN-2 30X20.
وأيضًا: (زر الطاقة ، شريط مزدوج ، سلك تصاعد)

5. تعليمات التجميع.
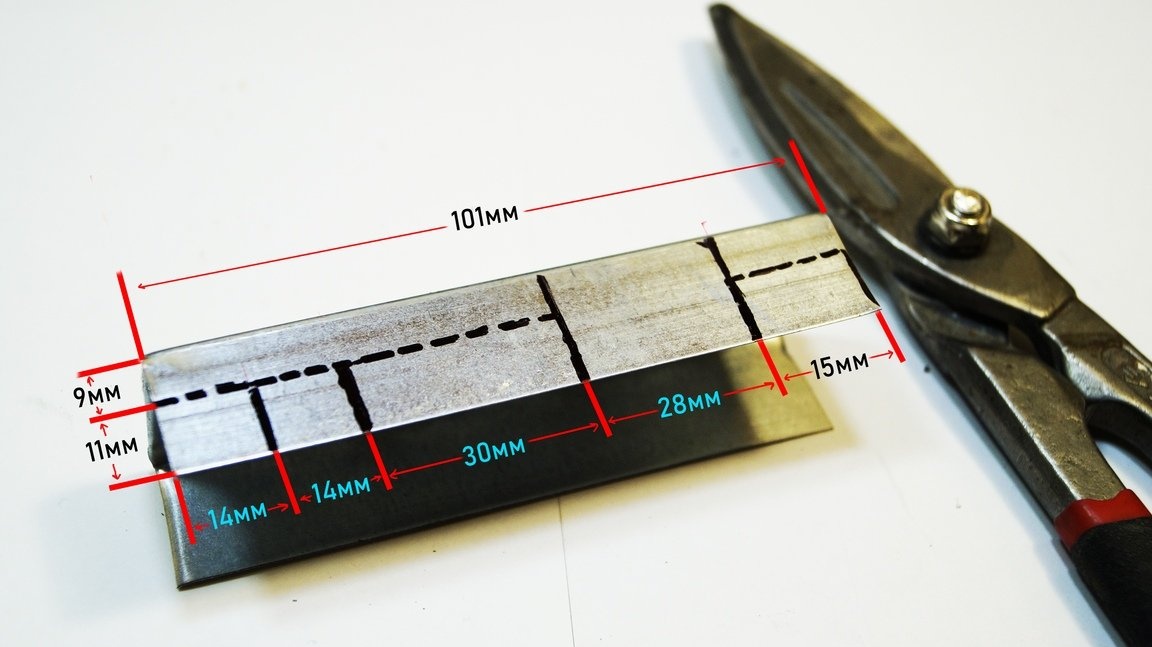
1.صنع إطار صرصور.
ارسم الترميز على ملف التعريف كما هو موضح في الصورة 5.
الصورة 5.
باستخدام مقص للمعادن ، نقوم بقطع وثني قطعة العمل بكماشة كما هو موضح في الصورة 6. قم بتمييز الجزء السفلي كما هو موضح في الصورة 6. قم بثني الملف الشخصي بكماشة كما في الصورة 7.
الصورة 6.
الصورة 7.
2. محرك كهربائي ومحور كرنك.
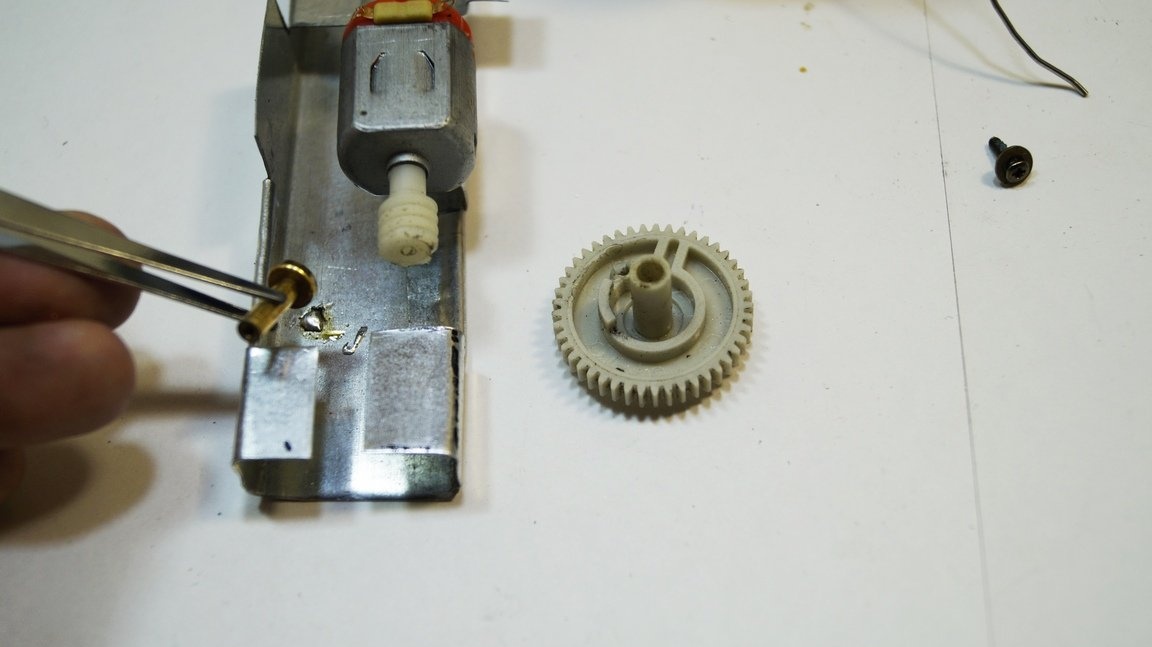
الخطوة التالية هي لحام المحرك الكهربائي في الإطار. يجب تفكيك المحرك قبل اللحام. نقوم بغمر غلاف المحرك والإطار بمكواة لحام صورة 8.
نقوم بلحام جسم المحرك الكهربائي والإطار معًا ، وتسخين الأجزاء جيدًا بمكواة اللحام ، والضغط عليها لبعضها البعض الصورة 9. !!! كن حذرا ، التفاصيل الحرارة ساخنة جدا !!!
الصورة 9.
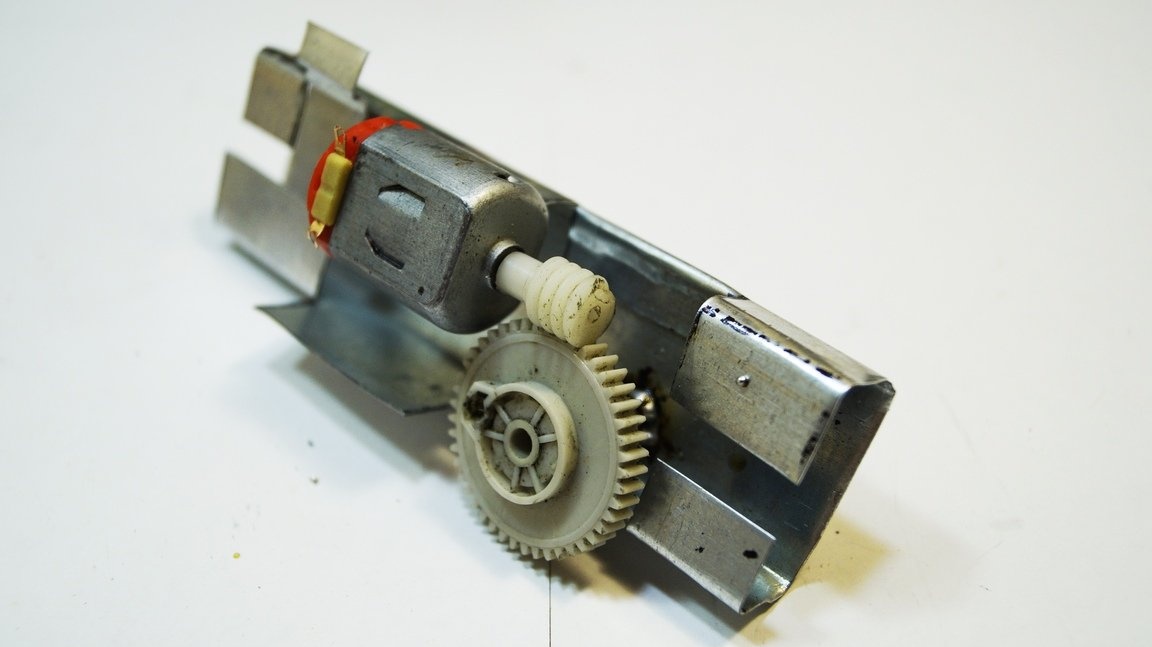
إعادة المحرك الكهربائي. نقوم بلحام محور الكرنك في مكانه ، ويتم ذلك تجريبيًا. يجب تثبيت ترس الدودة جيدًا معًا ، ولا يجب أن تكون التروس منحرفة. صورة 10.11.
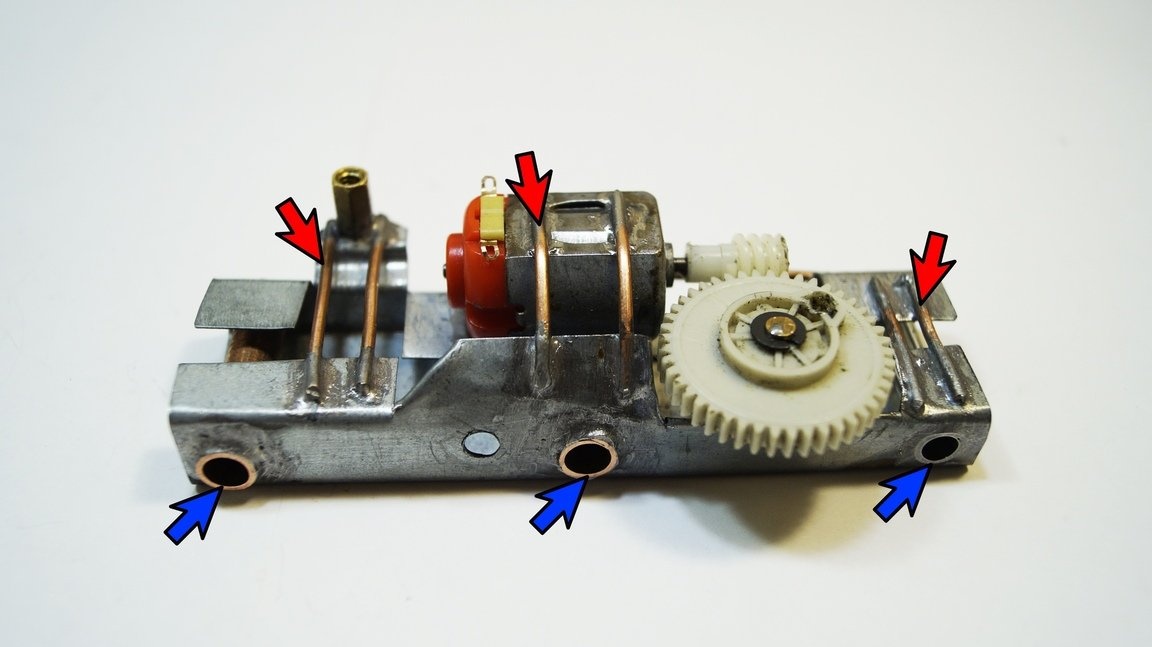
3. ثقوب أرجل الصرصور.
لإرفاق الكفوف الصرصور بالإطار ، تحتاج إلى حفر ثقوب باستخدام مثقاب 8 مم. نقوم بحفر ثقب في الأذن خلف المحرك الكهربائي باستخدام مثقاب 3.2 ملم
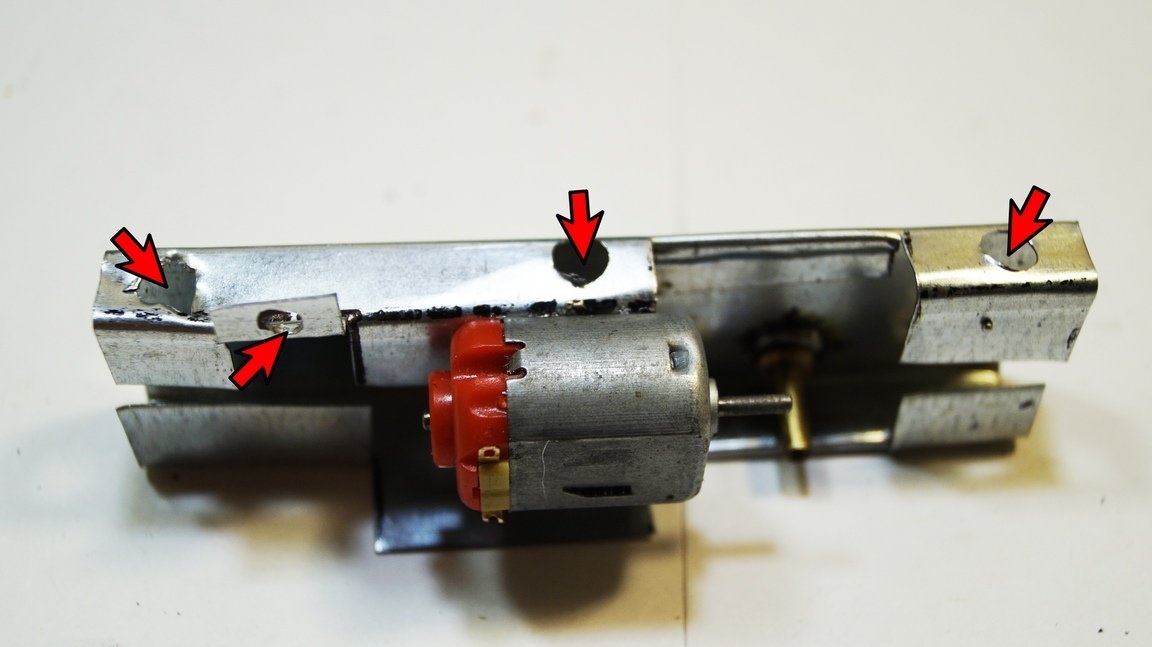
نقوم أيضًا بلحام الجوز في الأذن خلف المحرك الكهربائي. سيتم إرفاق الرافعة المسؤولة عن رفع الكفوف الوسطى على طول المحور الرأسي بهذا الجوز
لتعزيز تصميم الإطار ، تم تلحيم التقوية بسلك نحاسي 2.5 مم.
كما تم لحام البطانات 8 مم إلى نقاط التعلق بمخالب الصراصير الصورة 15.
4. الكفوف الصرصور.
تم استخدام سلك معدني بقطر 3 مم كمخالب صرصور ، وهو ملحوم إلى رأس M6 الترباس الصورة 16. يتم صنع الزوج الأوسط من مخالب الصراصير بشكل مختلف ، يتم حفر حفرة في رأس الترباس على طول قطر السلك. السلك منثني على شكل حرف "S" ، وهذا سيمكن أرجل الصرصور من الحركة بشكل عمودي صورة 17.
صورة 16.
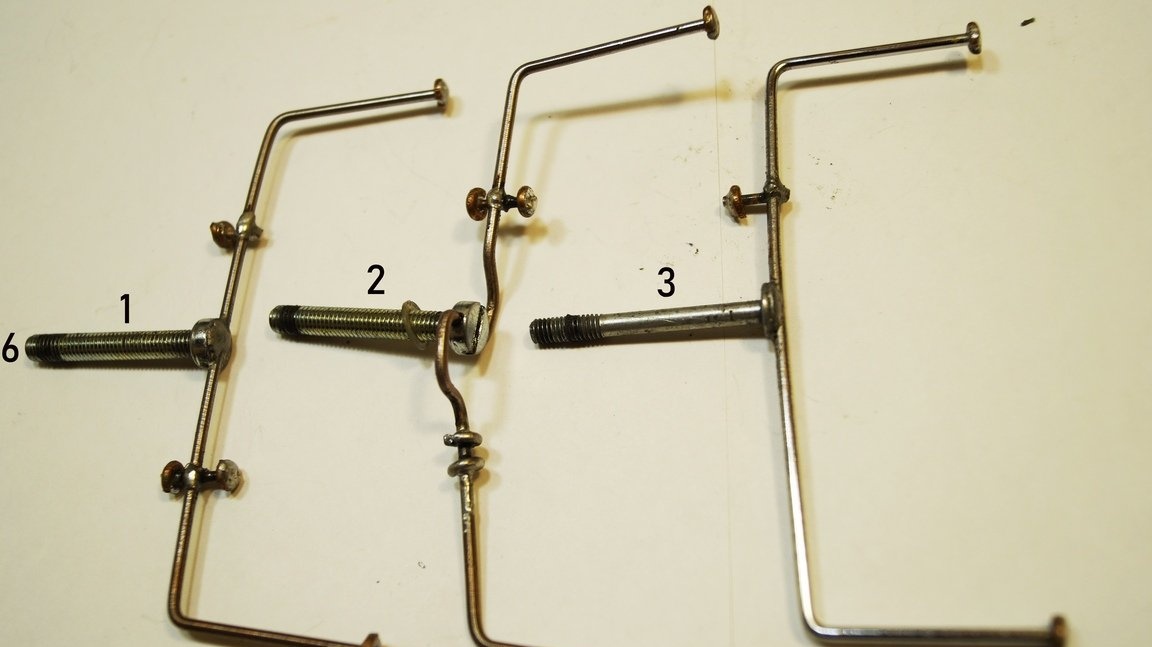
الصورة 17.

لإصلاح القضبان ، يتم لحام سلك نحاسي بطول 2.5 مم بطول 12 مم إلى أقدام الصرصور ، ويتم لحام حلقات النحاس إلى نهايتها. القضبان مصنوعة من الأسلاك النحاسية بمقطع عرضي 2.5 مم ، الأبعاد تقريبية ، من المستحسن ثني السلك بحيث كان هناك في المستقبل إمكانية التعديل على طول الصورة 18.
تظهر الصورة 19 منظرًا سفليًا ، مع تثبيت الكفوف على الإطار.
نحدد الجر من آلية كرنك إلى الأرجل الأمامية للصراصير. نقوم بعمل دفع بحاشية للقدرة على تعديله. دائرة نصف قطرها الساعد 8 مم الصورة 20.
نقوم بعمل رافعة لتحريك الكفوف الوسطى عموديا من الأسلاك النحاسية Photo 21.22.
هذا يكمل الجزء الميكانيكي من الصرصور.
صورة 21.

توضح الصورة 22 موقع الكفوف في الموضع السفلي لعمود آلية الساعد.
الصورة 22.

5. الجزء الكهربائي.
الصق حجرة البطارية على شريط مزدوج الجوانب لإطار الصرصور. الصق زر الطاقة على حجرة البطارية. نحن نلحم جميع عناصر الصورة 23.
الروبوت - الصرصور جاهز !!!