


مساء الخير ، أرغب في مشاركة التعليمات حول كهربة نموذج الترابط في مقياس 1/35 طامية 35163 JGSDF TYPE 61 TANK. للحركة ، سنستخدم علبة تروس مزدوجة Tamiya 70097 ، وكجهاز تحكم ESP 8266-12E. التحكم في Wi-Fi باستخدام shell ويب.
سنحتاج إلى:
- طامية 35163 JGSDF TYPE 61 TANK (1:35)
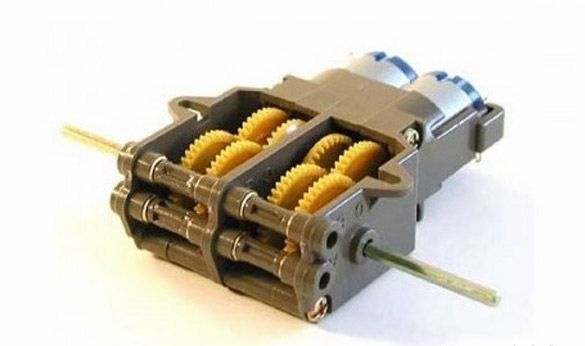
- طامية 70097 علبة تروس بمحركين
- غراء موديل أسمنت طامية
- ESP 8266 -12E أو ESP 8266 -12F
- AMS 1117 3.3v 800mA - مثبت جهد
- محرك محرك Qifei L9110
- مكثف 10 فولت 1000 فائق التوهج
- حجرة مفتوحة لبطاريتين AAA
- 4 بطاريات AAA أو 4 بطاريات AAA 1.2V 1000mA NI-MN
- 2 أوم مقاوم 2 قطعة.
- مقاوم 10 كيلو أوم 6 قطع.
- زر
- التبديل
- USB - TTL
- لوحة الدوائر
- لحام الحديد
- أسلاك متعددة الألوان
الخطوة 1 الإسكان والميكانيكا.
بادئ ذي بدء ، نحن بحاجة إلى الغراء النموذج طامية 35163. افتح الصندوق:
ابدأ ببثق تفاصيل النموذج. يجب قطع الأجزاء البارزة أو بقايا الإطار بسكين أو تنظيفها باستخدام ورق الصنفرة. نقوم بتجميع الجزء السفلي من الجسم وفقًا للتعليمات ، لا يجب فقط لصق الأجزاء لتثبيت عجلات القيادة. لقد قمت للتو بتطبيق هذه التفاصيل لالتقاط صورة:

على الجانب العكسي يبدو هذا:

كن حذرًا حتى لا تلصق حوامل العجلات بالغراء ، يجب أن تدور جميع العجلات بحرية. يجب أيضًا لصق اليرقات عند التقاطع. بعد تجميع الهيكل المعدني ، من الأفضل تركه يجف تمامًا قبل اتخاذ إجراءات أخرى:

أثناء جفاف الهيكل ، قم بلصق الجزء العلوي. أولا ، الأساس. هناك العديد من الأجزاء الصغيرة ، فمن الأفضل استخدام الملقط للصق مثل هذه الأجزاء. قاعدة لاصق:

نجمع البرج. يتوفر خياران للبرج. يكمن الاختلاف في تفاصيل تركيب البرميل على البرج. الخيار الأول هو التثبيت القياسي ، والثاني مع الحماية من الغبار. من الجدير اختيار أيهما تفضل. ينعكس هذا الاختلاف فقط في المظهر. قام بلصق النموذج في عطلات رأس السنة الجديدة ، لذلك ارتدى الدبابة أيضًا:

جمعيها واتركيها لتجف:

أثناء تجفيف النموذج ، دعنا ننتقل إلى تجميع محرك التروس. سوف نستخدم محرك تروس ومحركات مُصنّعة من قبل نفس الشركة مثل النموذج ، وهي طامية 70097:
التعليمات التي تأتي مع المجموعة لا تحتوي على اللغة الروسية ، لكنها مفهومة بالفعل.يتم وصف خيارين للتجميع هناك بالتفصيل:
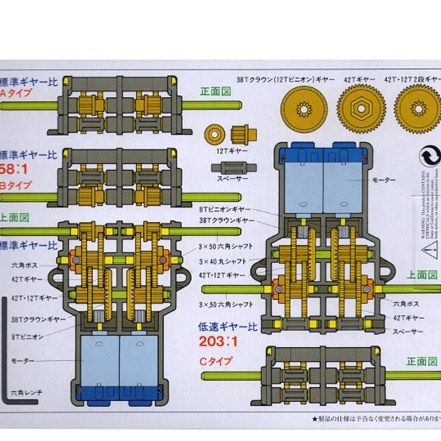
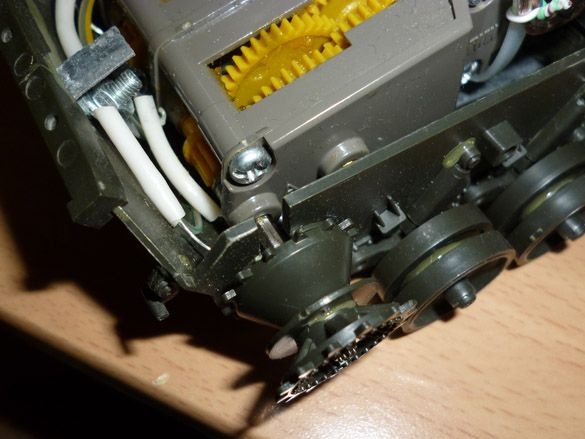
في الحالة الأولى ، تكون نسبة التروس 58: 1 ، والثانية - 203: 1. نستخدم الخيار الأول. يجب تمرير أعمدة الإخراج لعلبة التروس من خلال الثقوب المركزية. يجب قطع العيون الجانبية لعلبة التروس ، وسوف تتداخل مع التثبيت على النموذج. خلاف ذلك ، فإن علبة التروس بسيطة للغاية لوضعها على النموذج. ثم نضع تروسًا صغيرة على المحركات وندخلها في علبة التروس. لكل محرك ، يجب لحام المقاوم 2 أوم إلى أحد جهات الاتصال. نقوم بلحام سلك واحد في المقاوم ، والسلك الثاني في الاتصال الثاني للمحرك. بعد الانتهاء من تثبيت المحركات ، وضعنا محرك التروس المجمع على النموذج. اربط باستخدام الغراء.
نحن أيضًا نقود عجلات القيادة إلى أعمدة الإخراج.
تتضمن الخطط المستقبلية إضافة وظيفة دوران البرج ، وربما إطلاق الأسلحة. في التعليمات التالية سأحاول وصف هذه التعديلات.
الخطوة 2 كهربة.
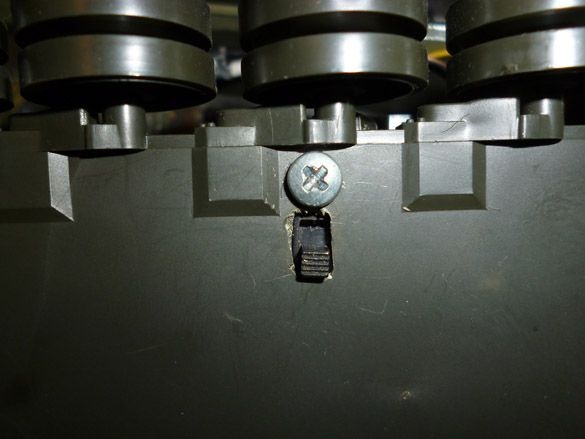
بعد جمع النموذج ، وانتظار التجفيف الكامل ، انتقل إلى ه حشو. في الجزء السفلي نقطع المفتاح:
حجرتان بطارية ملحومتان في سلسلة ولصقهما معًا. نقوم أيضًا بإخراج موصل مناسب في نهاية الأسلاك.

لتشغيل هذا النموذج ، يمكنك استخدام بطاريات AAA ("الصغيرة") أو بطاريات Ni-Mn 1.2 فولت AAA.
خذ ESP8266. هذه وحدة صغيرة ولكنها وظيفية تمامًا ، وتوفر وحدة Wi-Fi المدمجة الاتصال بها المنزل شبكة Wi-fi. أوصي باختيار وحدة مع 4 ميغابايت من الذاكرة. لتشغيل وميض ESP-8266 ESP ، يجب عليك تجميع حد أدنى من الربط. الوحدة تعمل بقوة 3.3 فولت. لا يمكن توصيله مباشرة بمصدر طاقة غير مستقر. لذلك ، ندرج في الدائرة مثبت جهد AMS 1117 3.3v. يتم توصيل دبوس VCC مباشرة بكابل الطاقة الموجب من المثبت ، ويجب توصيل المسامير المتبقية: CH_PD و RESET و GPIO0 و GPIO2 من خلال المقاوم ، أي يتم سحبه إلى مصدر الطاقة (VCC). يوصى باستخدام مقاومات 10kOm ، ولكن يمكن استبدالها بأخرى من 4.7kOm إلى 50kOm. من المستحيل تغيير المقاوم GPIO15 فقط ، يجب أن تصل قيمته الاسمية إلى 10k. مباشرة ، نقوم بتوصيل GND فقط بسلك الطاقة السالب (GND). للدخول إلى وضع البرنامج الثابت للوحدة ، يجب توصيل GPIO0 بـ GND. الزر مطلوب لإعادة تشغيل الوحدة عند وميضها. يتم إجراء استنتاجات Tx و Rx و GND في موصل USB-TTL. اتصال USB-TTL هو كما يلي:
ESP 8266 - USB-TTL
Tx - Rx
Rx - تكساس
GND - GND
المخطط كما يلي:

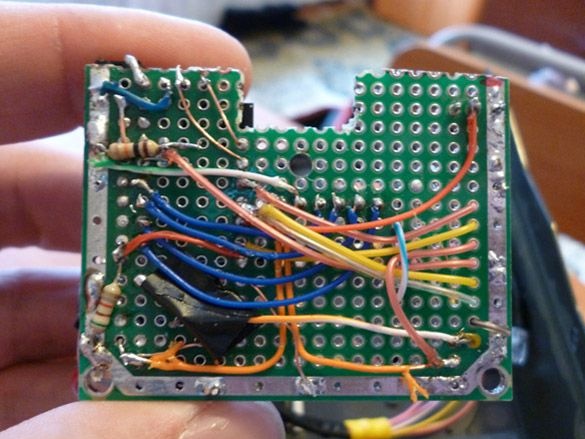
من الأكثر ملاءمة وضع كل شيء على لوحة دوائر صغيرة:
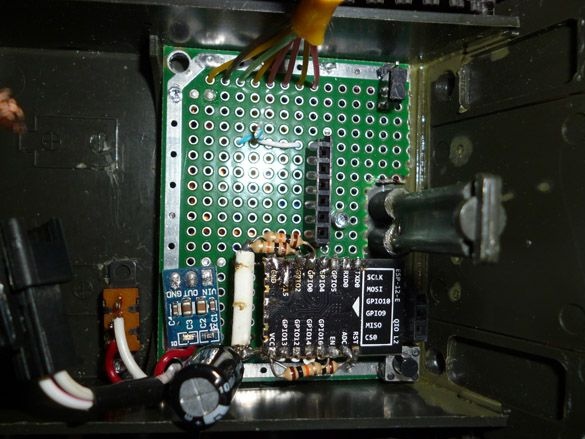
نقوم بإصلاح لوحة الدائرة في الجزء الخلفي من الخزان:
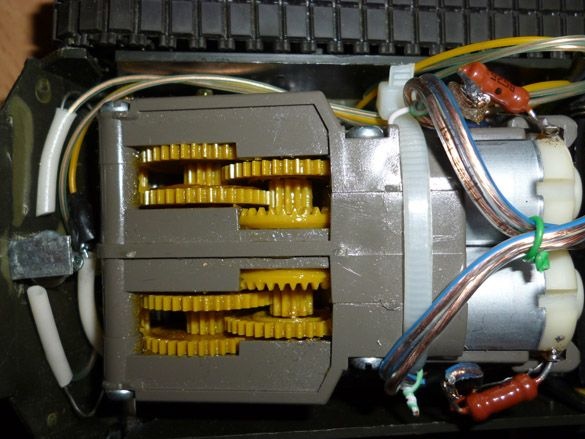
يتم وضع حجرة البطارية بين محرك التروس ولوحة الدائرة:

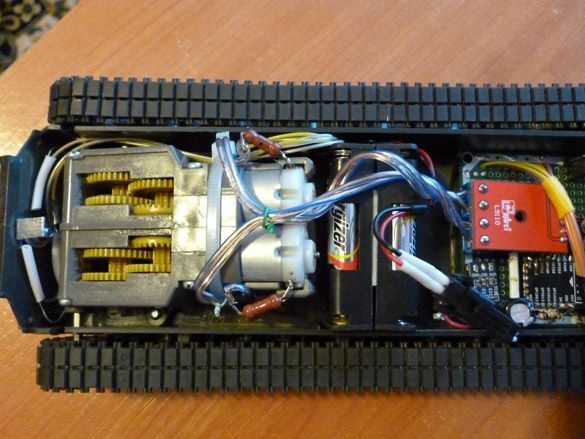
تقع جميع الكهرباء المجمعة والمركبة في الجزء السفلي من الخزان:
الخطوة 3 البرمجيات.
لتحرير الرسم وملءه في ESP ، يجب تنزيله اردوينو IDE من الموقع الرسمي
Arduino.cc.
ثم قم بتثبيت Arduino IDE. بعد ذلك ، ننتقل إلى تثبيت الوظيفة الإضافية لـ ESP. نقوم بذلك من خلال مدير المجالس. أولاً ، ابدأ Arduino IDE ، ثم File - Settings - في حقل عناوين URL الإضافية لـ Boards Manager ، أدخل الرابط:
http://arduino.esp8266.com/package_esp8266com_index.jsonانقر فوق "موافق" (يمكنك إدخال عدة ارتباطات مفصولة بفاصلة في هذا الحقل). ثم انتقل إلى Tools - Board - Boards Manager في حقل الفلتر ، وأدخل esp8266 وحدد ESP8266 بواسطة ESP8266 Community Forum. انقر فوق تثبيت وانتظر حتى ينتهي التنزيل. الآن نختار في القائمة أدوات - لوحة - عام ESP8266 نقوم بضبط تردد وحدتك 80 أو 160 ميجا هرتز ، حجم ذاكرة الفلاش. ثم حدد المنفذ التسلسلي الذي يتصل به محول USB-TTL.
تحتاج الآن إلى تثبيت الأداة للوصول إلى نظام ملفات ESP. للقيام بذلك ، انقل الملفات الموجودة في الأرشيف إلى مجلد الأدوات ، والذي يمكن العثور عليه في الدليل الجذر لـ Arduino IDE.
الخطوة 4 رسم
الآن بعد أن أصبحت بيئة البرمجة جاهزة ، دعنا ننتقل إلى تحرير الرسم التخطيطي. افتح الرسم:
نبحث في بدايته عن الحقل "String _ssid =" "؛". بين علامات الاقتباس ، حدد نقطة الوصول التي تريد الاتصال بها.
الحقل "String _password =" "؛" - يستخدم لتسجيل كلمة المرور لهذه الشبكة.
إذا لم يتمكن ESP من الاتصال بالشبكة الموضحة في الأسطر السابقة ، فسيقوم جهاز التحكم بإنشاء شبكة يمكنه الاتصال بها.
الحقل "String _ssidAP =" "؛" - يشير إلى اسم الشبكة التي يتم إنشاؤها.
الحقل "String _passwordAP =" 12345678 "؛" - تعيين كلمة مرور الشبكة التي تم إنشاؤها.
الحقل "سلسلة SSDP_Name =" ESP_Wi-Fi "؛" - تعيين اسم SSDP.
بعد تحرير جميع الأسطر أعلاه ، تحتاج إلى تحميل غلاف الويب إلى ESP 8266. نقوم بتوصيل ESP 8266 عبر USB-TTL بالكمبيوتر وفقًا للرسم التخطيطي أعلاه. في Arduino IDE ، حدد Tools - ESP8266 Sketch Data Upload. نحن في انتظار انتهاء عملية تحميل الملف. الآن يمكنك تسجيل الرسم نفسه. أولاً ، ضع ESP8266 في وضع البرامج الثابتة. للقيام بذلك ، قم بتوصيل GPIO0 بـ GND. اضغط على زر ملء الرسم التخطيطي ، ثم اضغط على زر إعادة الضبط على وحدة EPS. في انتظار رسم الانتهاء من ملء.
سأشرح قليلاً خوارزمية ESP 8266. عند بدء التشغيل ، يحاول EPS الاتصال بشبكة Wi-Fi المحددة في حقل String _ssid. إذا فشل هذا لسبب ما ، يرفع ESP شبكته بالاسم المحدد في حقل ssidAP. في الحالة الأولى ، يمكنك التحكم في الخزان من خلال أي جهاز متصل بالشبكة نفسها. في الحالة الثانية ، تحتاج إلى الاتصال بـ ESP من خلال أي جهاز أو جهاز لوحي أو هاتف أو كمبيوتر. بعد ذلك ، في متصفح الجهاز الذي سنتحكم من خلاله بالخزان ، تحتاج إلى إدخال عنوان IP للخزان. يمكنك معرفة عنوان IP عن طريق توصيل ESP بالكمبيوتر ، ثم فتح نافذة المحطة الطرفية وإعادة تشغيل ESP. عند تشغيله ، سيتم كتابة عنوان IP الخاص بالخزان في نافذة المحطة الطرفية. أو يمكنك تحديد عنوان IP ثابت تم تعيينه بواسطة ESP في إعدادات موجه Wi-Fi. أيضًا ، إذا كنت تستخدم جهاز كمبيوتر يعمل بنظام التشغيل Windows ، يمكنك الانتقال إلى البنية التحتية للشبكة ، والعثور على خزاننا هناك والنقر المزدوج للاتصال به. إذا قام ESP نفسه برفع نقطة الوصول ، فسيكون عنوان IP الخاص بالدبابة 192.168.1.1.
واجهة الويب مكتوبة بلغة HTML وتتكون من صفحتين. يحتوي الأول على أوامر التحكم. في الثانية ، يمكنك تغيير إعدادات ESP 8266. في صفحة الإعدادات ، تتوفر المعلمات التالية للتغيير: اسم نقطة الوصول التي تريد الاتصال بها ، وكلمة مرور نقطة الوصول هذه ، واسم الخزان ، واسم الشبكة التي يتم إنشاؤها وكلمة المرور للاتصال بهذه الشبكة. لن تسري جميع التغييرات إلا بعد إعادة التشغيل. تتوفر ميزة إعادة تحميل ESP أيضًا من واجهة الويب.
بعد الانتهاء من جميع الأعمال ، يمكن طلاء الخزان باستخدام دهانات نموذجية. يبدو الخزان المطلي أجمل:

ليس لدي الصبر على مثل هذه الوظيفة. لذلك ، يتم ترك النماذج الخاصة بي بدون لوحة:

