
مرحبا لجميع محبي الالكترونيات. في هذه المقالة ، سأخبرك بكيفية إنشاء روبوت محرك بحث يسير على طول خط أسود ، والذي يمكنك رسمه كما تريد. أنا متأكد من أن مجموعة الأدوات هذه ستكون لعبة مثيرة للاهتمام للغاية لمن سيجمعها.
لن أسحب لفترة طويلة ، سنذهب مباشرة إلى التصنيع
قبل قراءة المقال ، أقترح مشاهدة فيديو مع معالج مفصل لتجميع مجموعة الأدوات هذه ، بالإضافة إلى فحوصات الأداء.
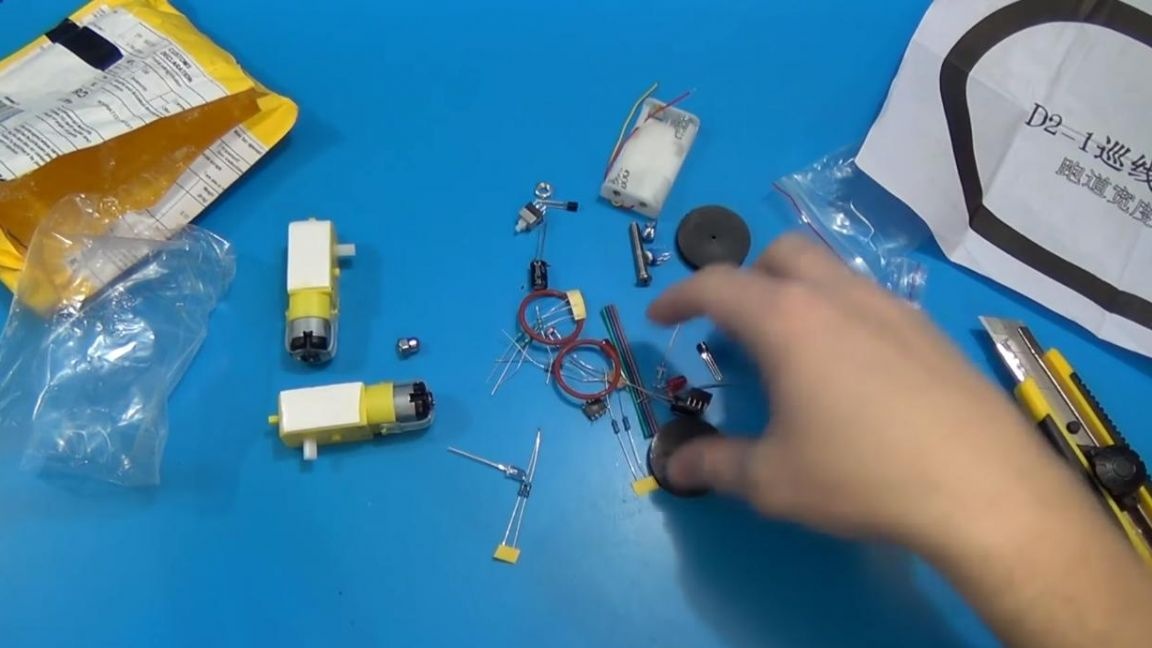
من أجل جعل روبوت محرك البحث الذي يسافر على طول الخط الأسود افعلها بنفسك، ستحتاج إلى:
* كيت
* لحام الحديد ، اللحيم ، الجريان
* قواطع جانبية
* متعدد
* المباراة لحام "جهة ثالثة"
* كماشة
* مفك فيليبس
الخطوة الأولى.
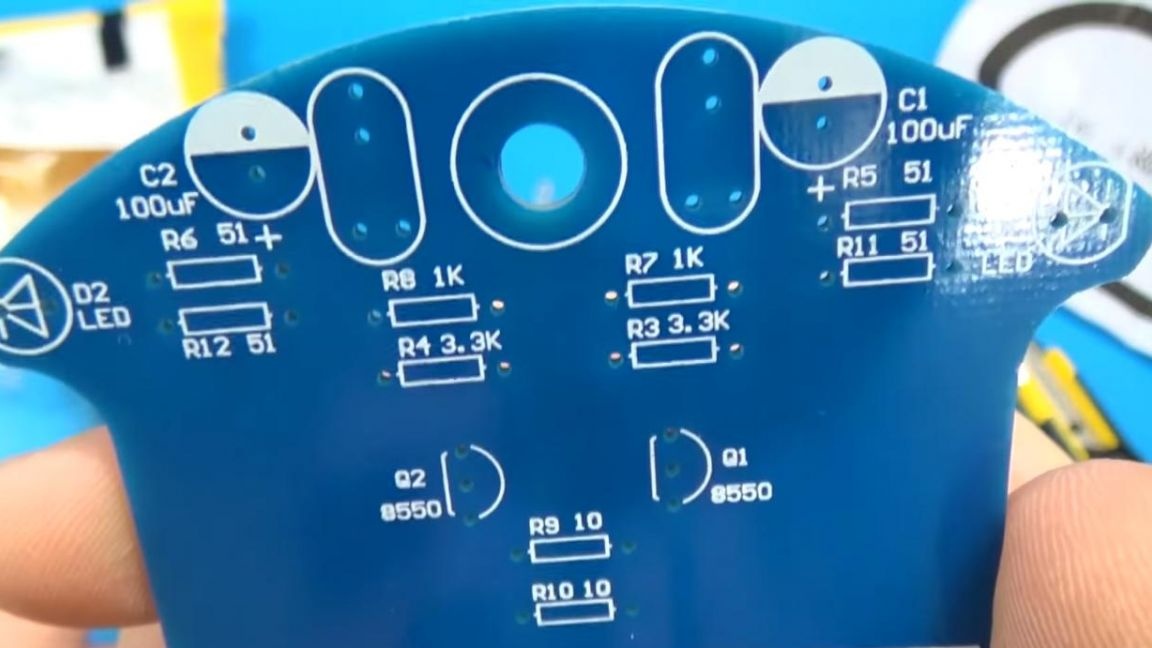
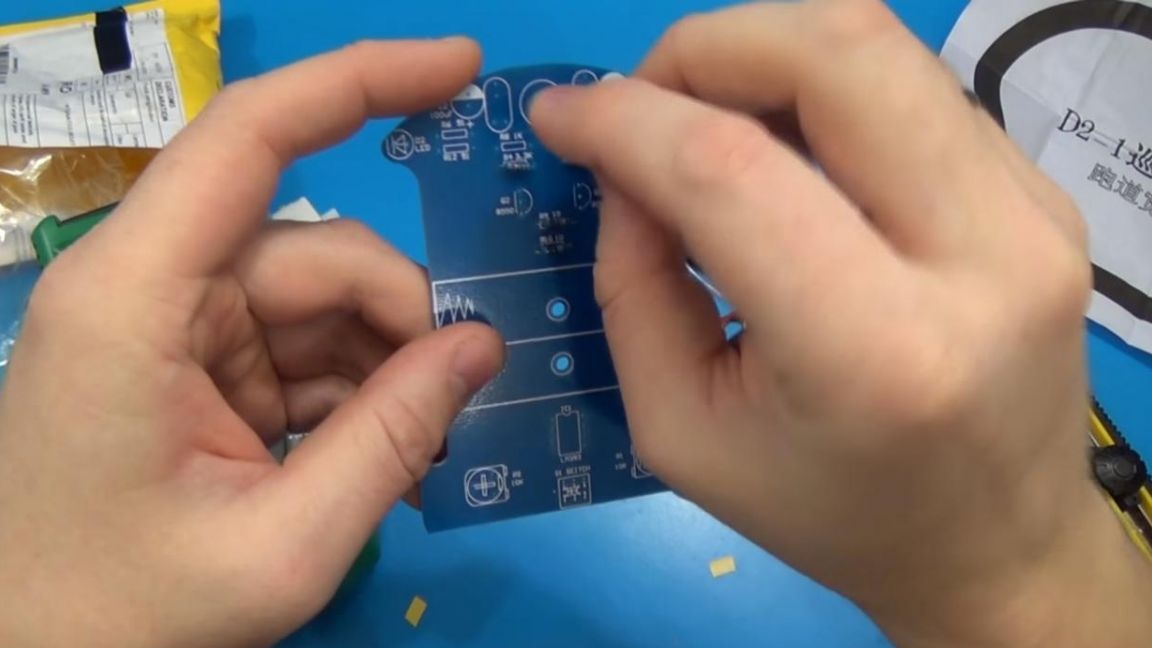
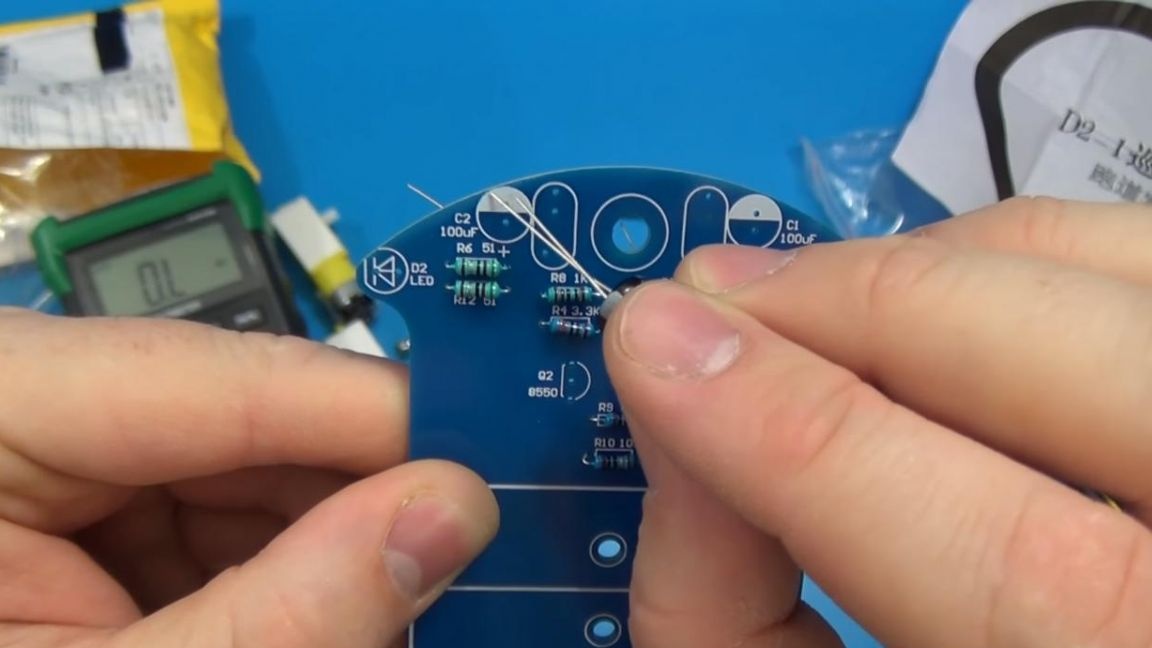
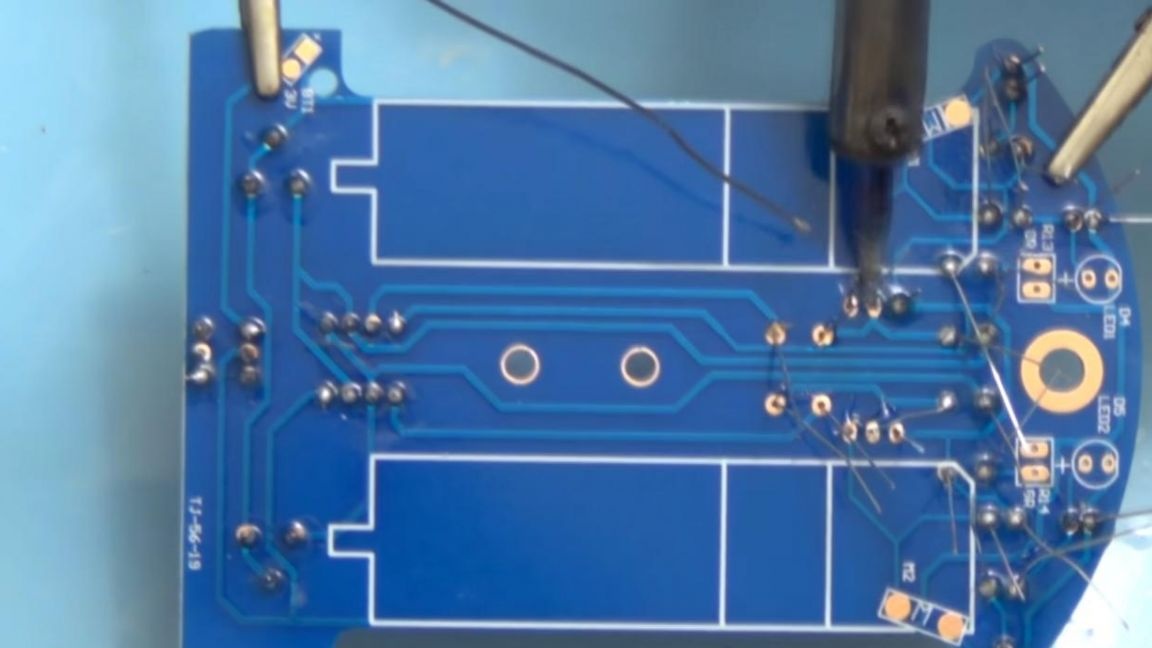
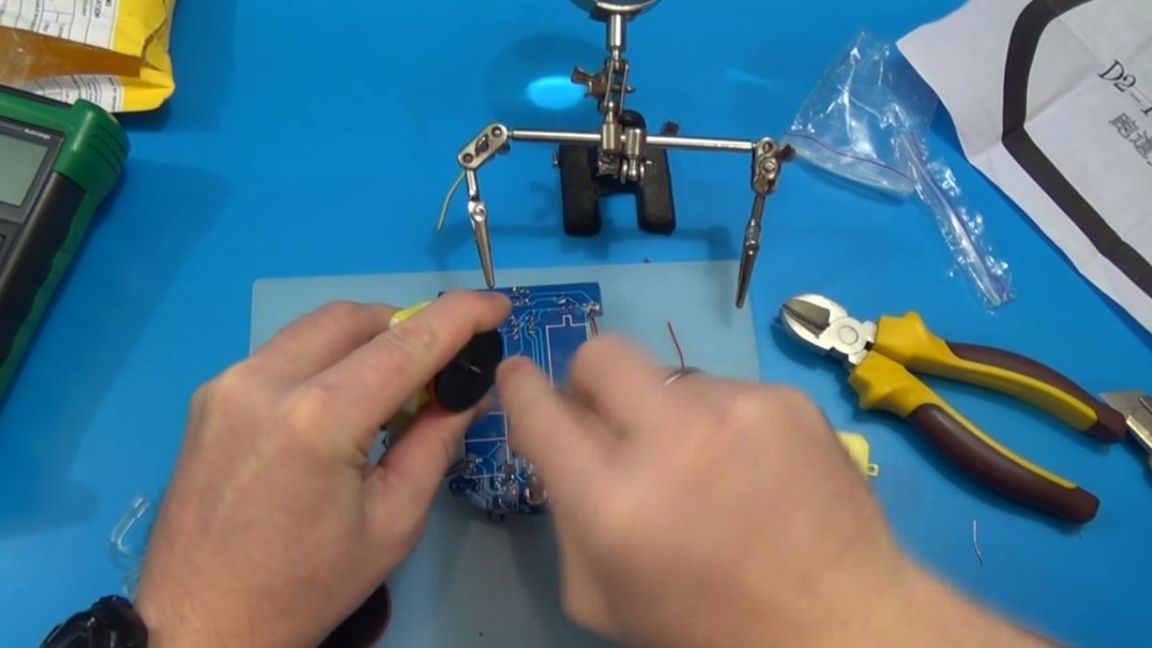
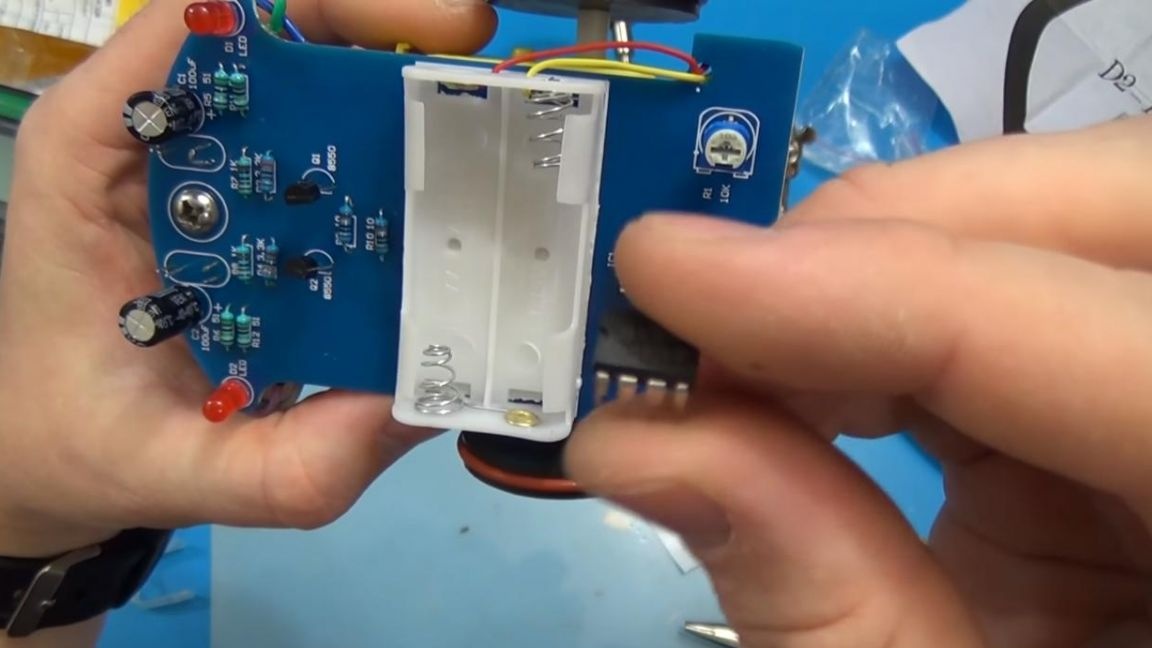
بادئ ذي بدء ، تحتاج إلى وضع جميع المكونات على اللوحة ، وتشمل المجموعة كلا من المقاومات والمكثفات والترانزستورات.
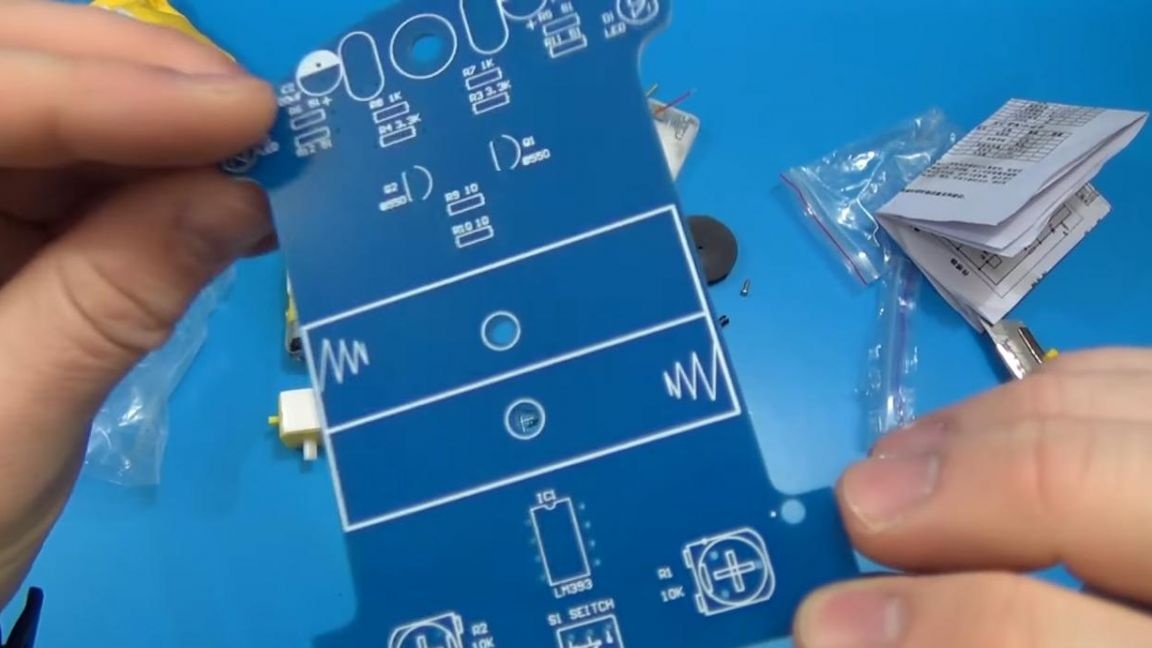
تحتاج أولاً إلى تثبيت المقاومات في أماكنها ، والتي يشار إلى قيمتها الاسمية على اللوحة ، في حين أن المقاومات نفسها مشفرة بالألوان ، والتي يمكنك من خلالها تحديد مقاومة المقاوم الواحد. أيضا ، يمكن قياس المقاومة باستخدام جهاز متعدد ، وهذه الطريقة ستكون أسرع ، ولكن هذا لا يعني أنها ضرورية. نرتب المقاومات على اللوح وفقًا لقيمتها الاسمية ، ونقوم بثني الأطراف قليلاً على الجانب العكسي ، ويتم ذلك حتى لا تسقط عند اللحام.

الخطوة الثانية
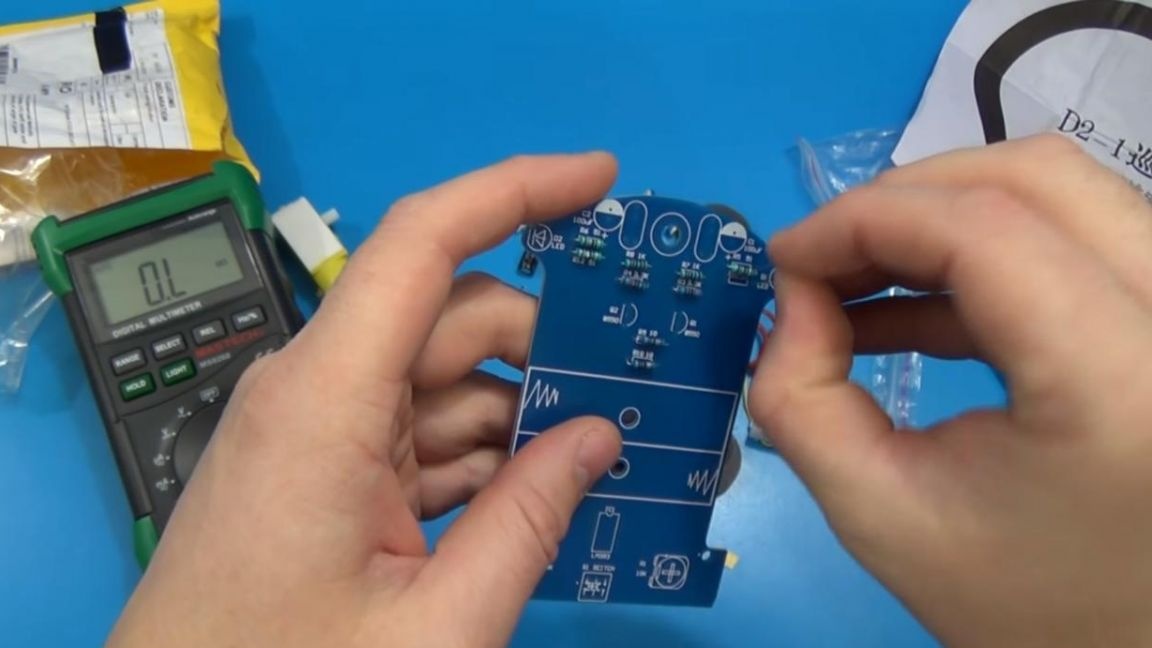
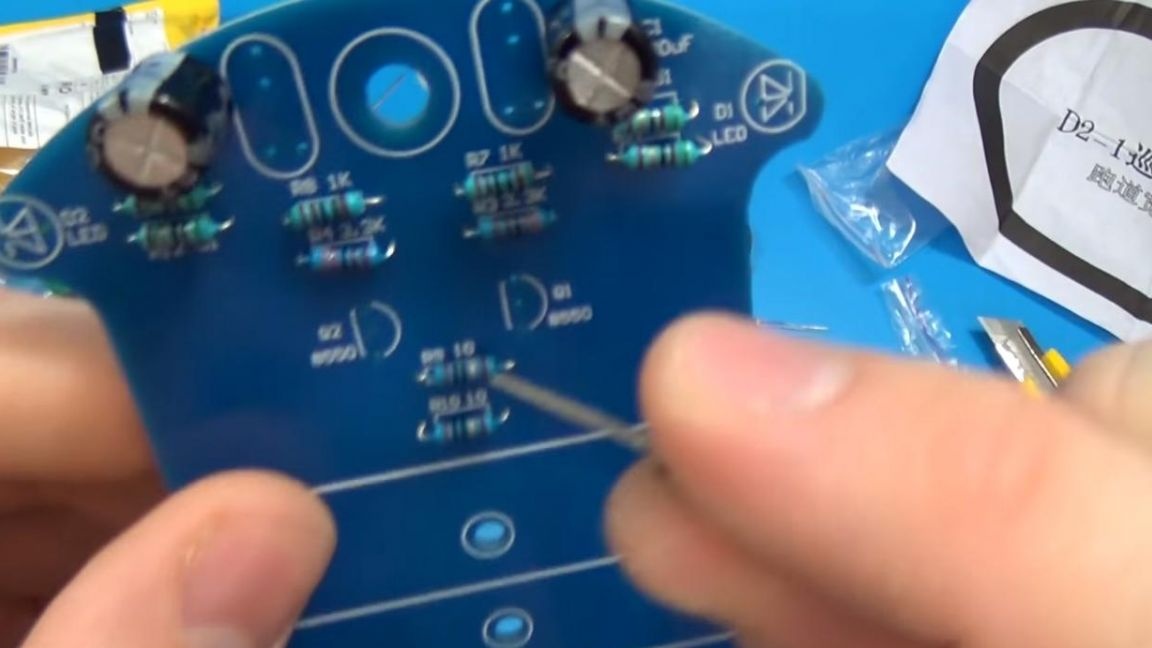
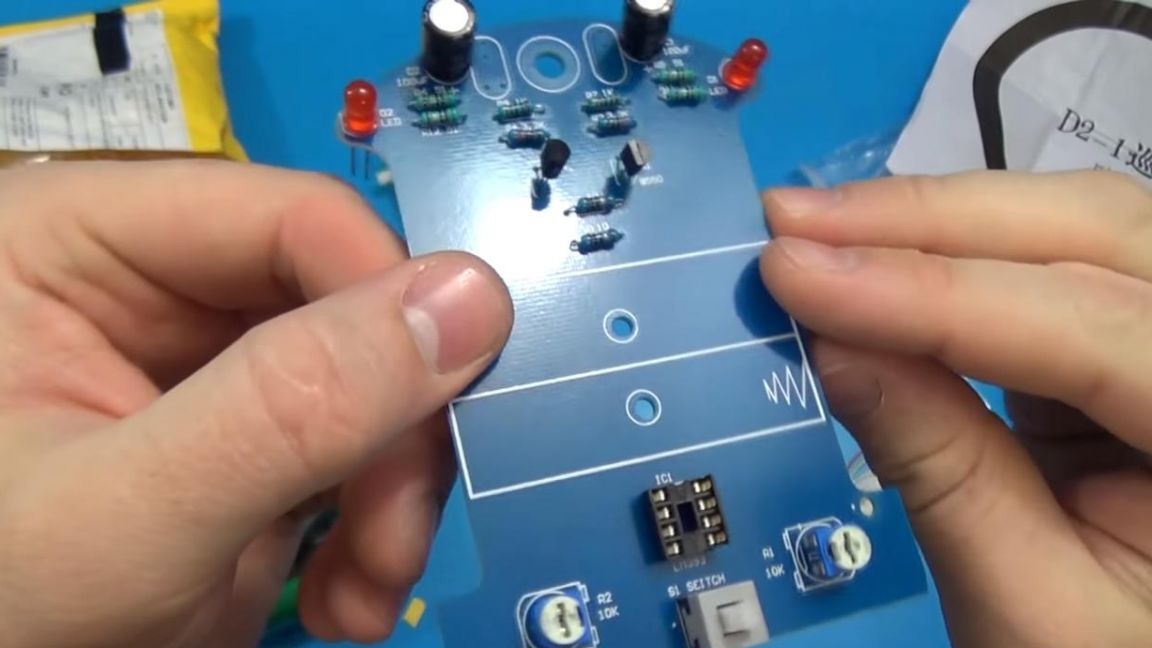
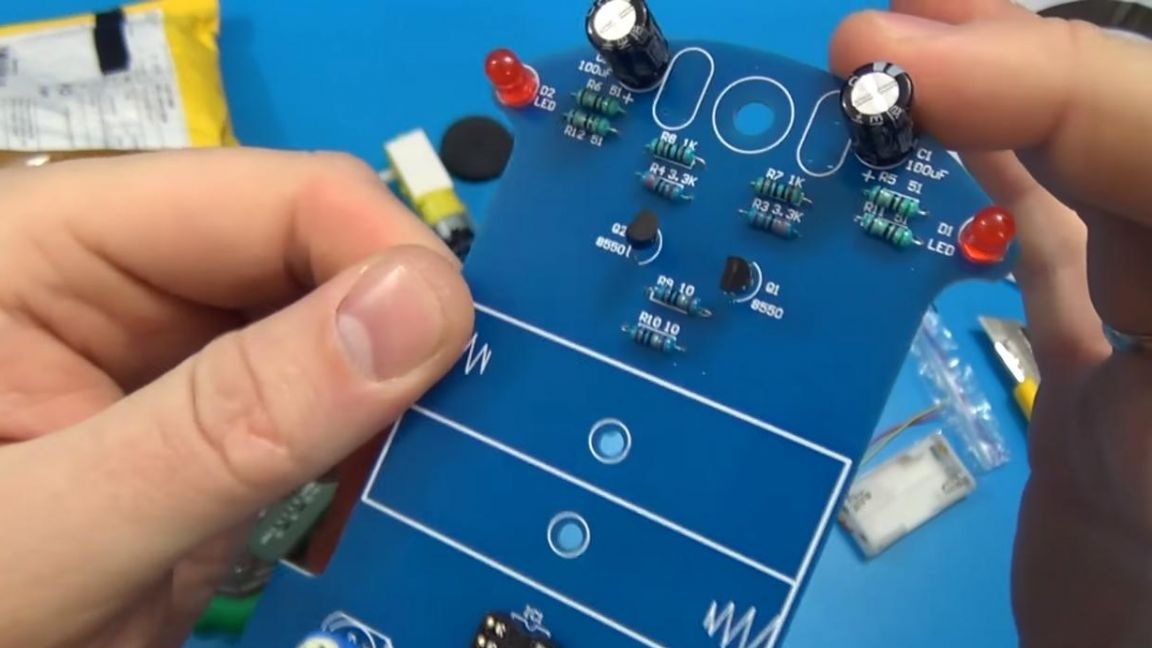
المقاومات كلها في مكانها ، تليها المكثفات ، على عكس المكونات السابقة ، هذه لها قطبية. يشار إلى ناقص المكثف في قضيته بشريط أبيض بشرطة ؛ على اللوح ، يشار إلى ناقص نصف دائرة مظللة بيضاء.
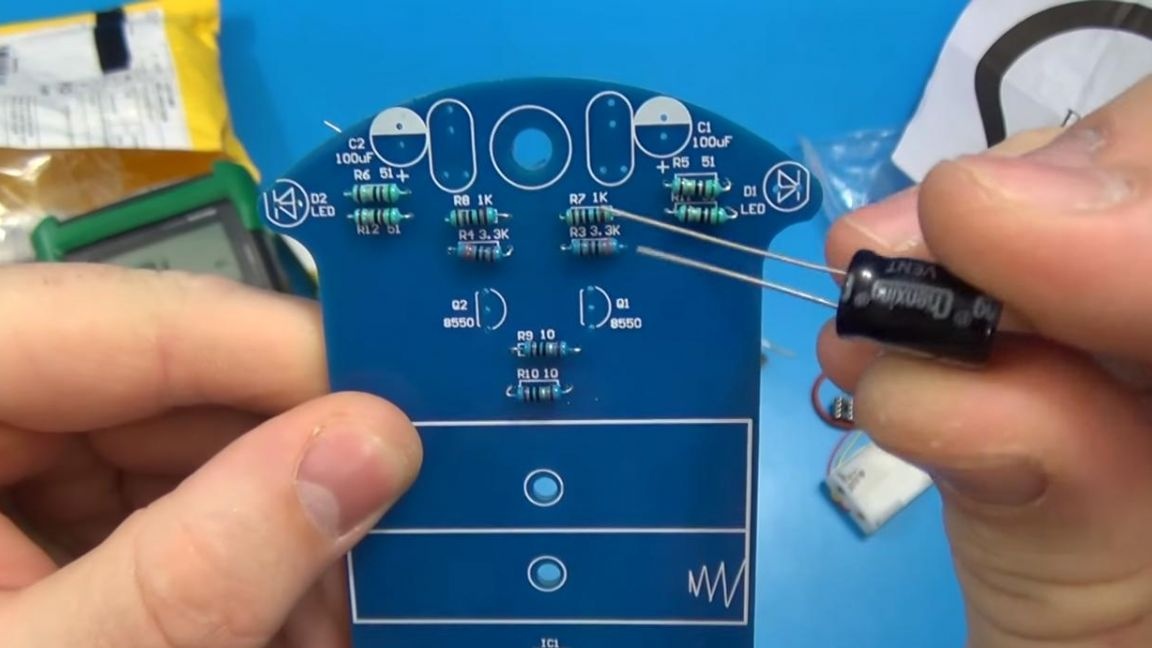
عندما تكون المكثفات في أماكنها ، ننتقل إلى الترانزستورات ، فهي نفسها بالنسبة لنا ، لذلك لا يمكننا الاختلاط مع بعضها البعض. لوضعها بشكل صحيح على اللوحة ، تحتاج إلى الجمع بين الجزء المسطح من الترانزستور مع شرطة على اللوحة.
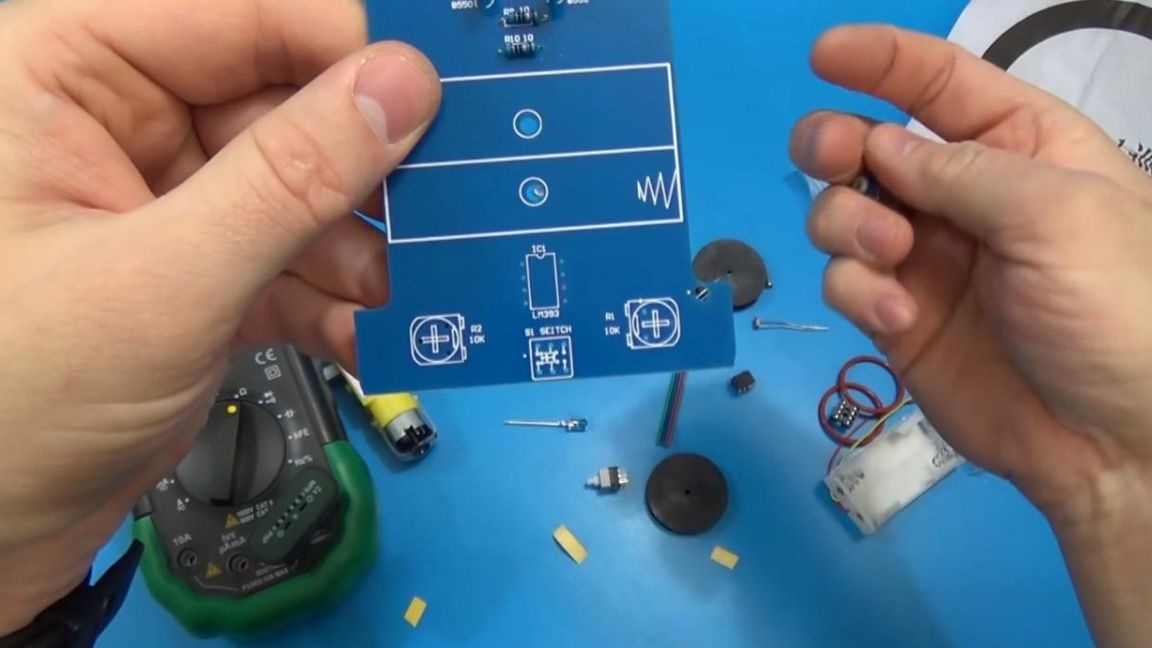
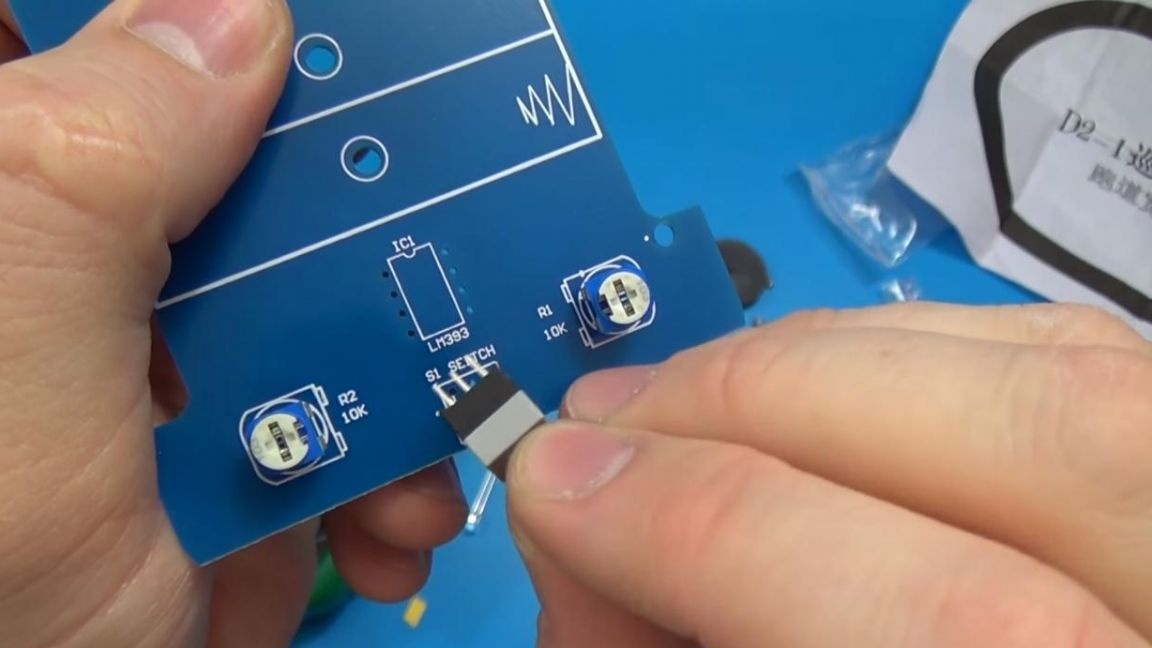
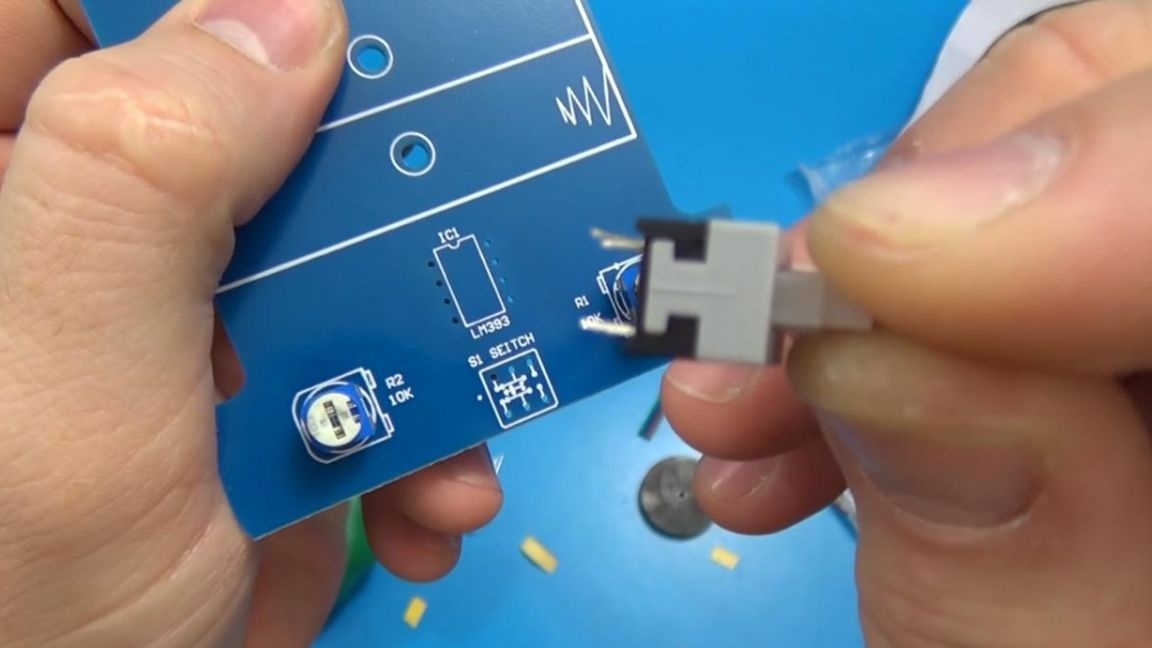
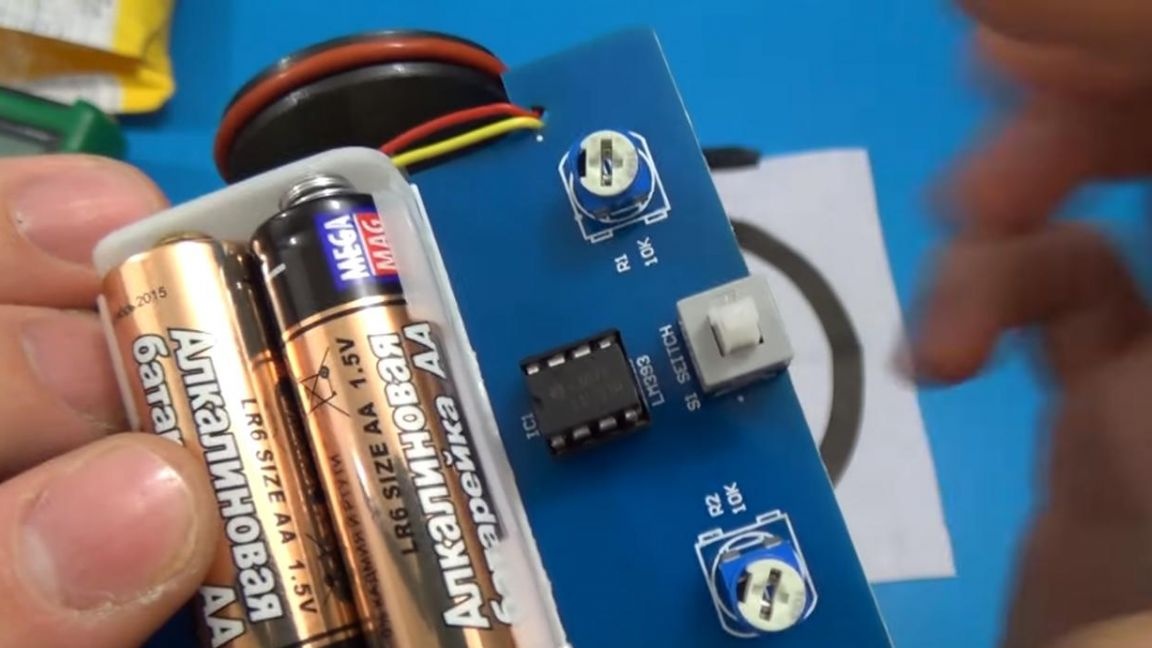
ثم نقوم بتثبيت مقاومتي توليف ، فيما يتعلق بموقع المحطات لن يعمل لوضعها بشكل غير صحيح ، وهو أمر جيد. نضع أيضًا زر الطاقة ، وهو في وضع الإيقاف ، أي أنه يمكن أن يكون في وضع التشغيل أو الإيقاف ، يتوافق موقعه الصحيح مع مصادفة موضع الشريط على الزر نفسه مع نقطة على اللوحة.
الخطوة الثالثة
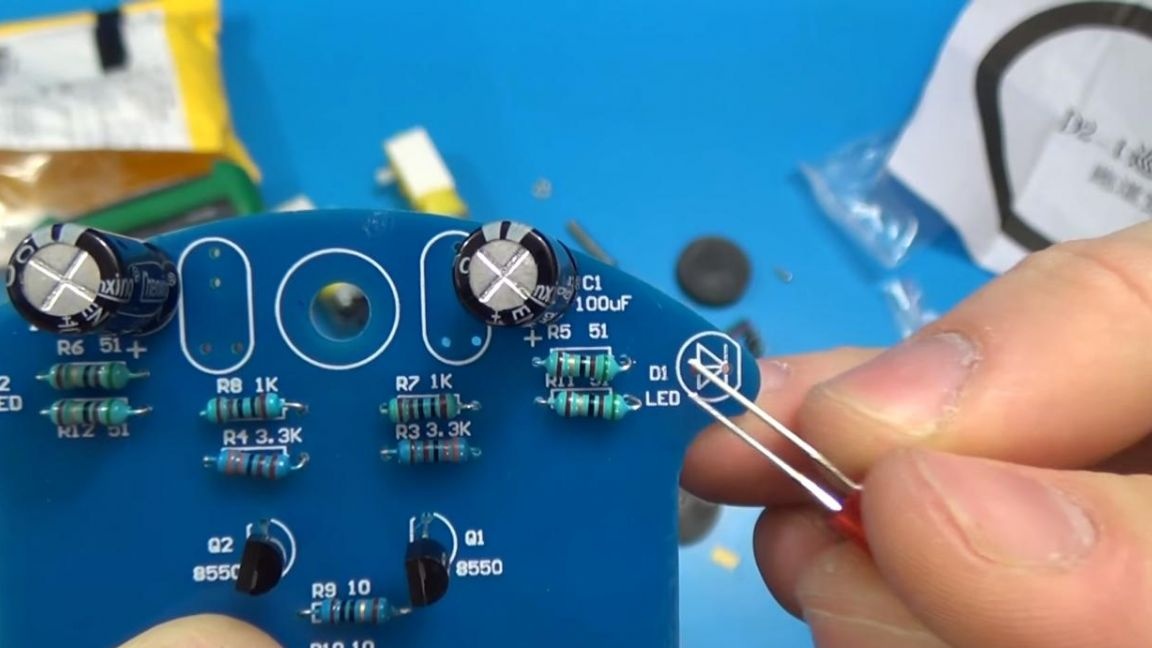
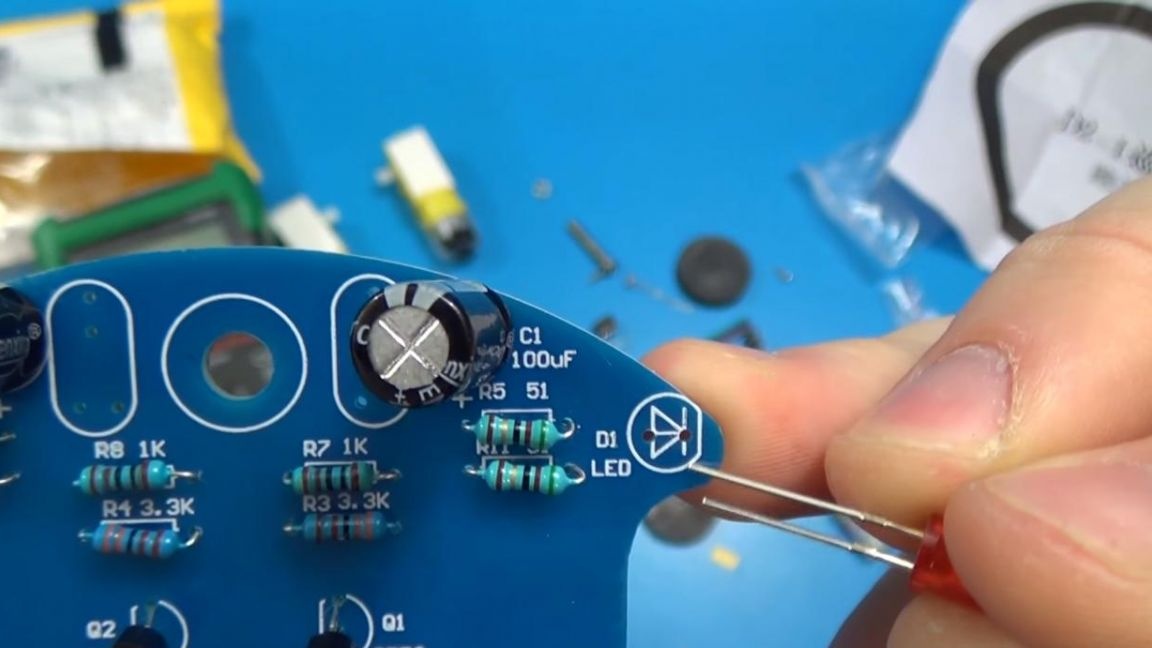
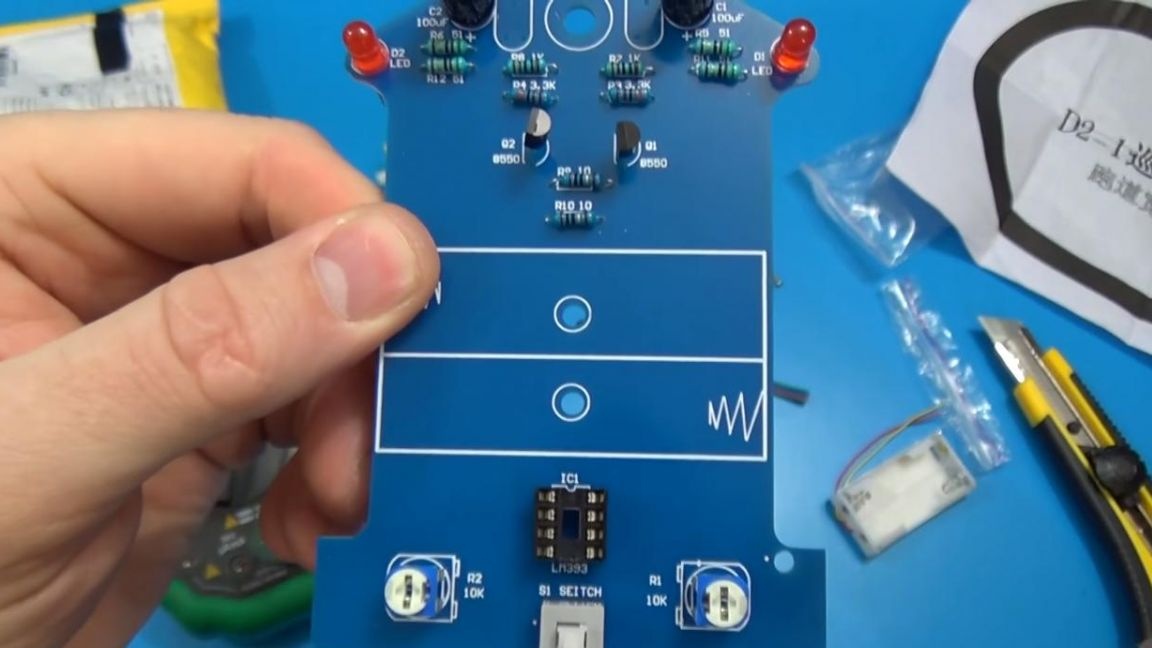
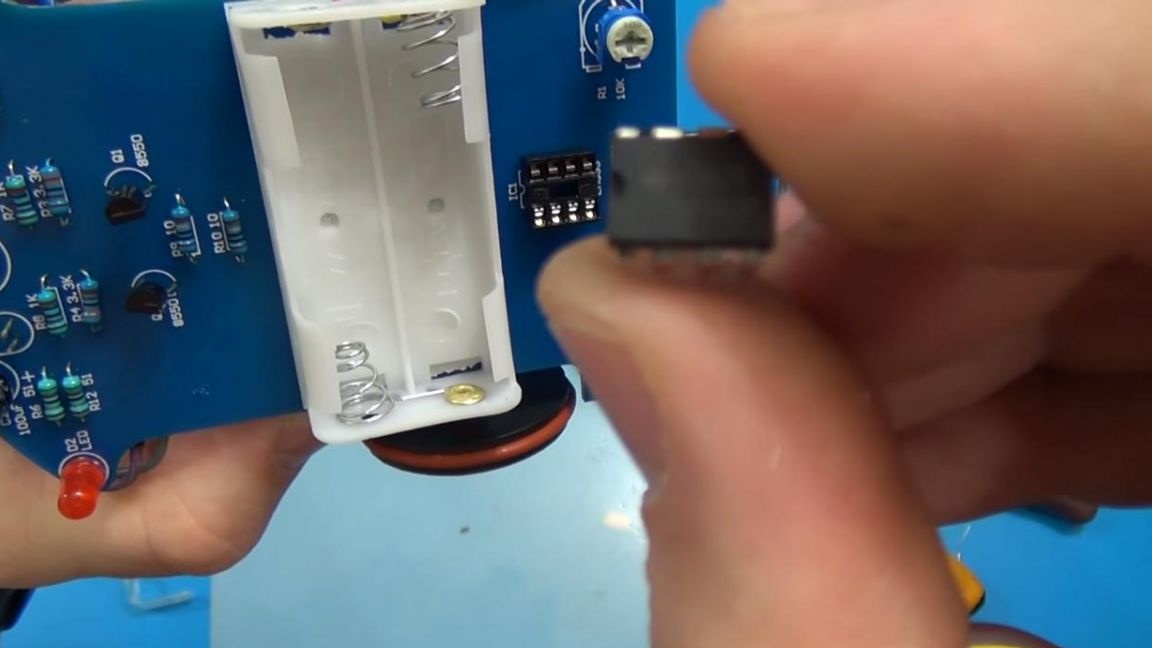
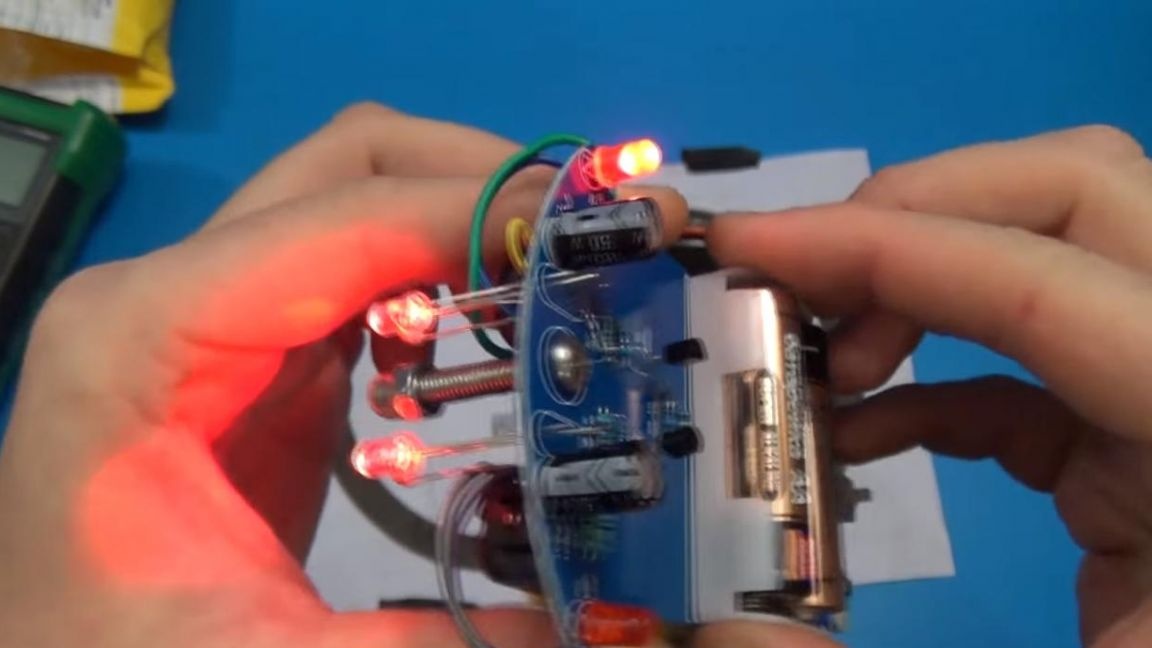
حان الوقت للتعامل مع المصابيح ، هناك أربعة منها في المجموعة ، اثنان أحمر واثنان أبيض. على السبورة ، يشار إلى علامة زائد بمثلث ، على LED هو إخراج طويل ، مع ناقص كل شيء واضح. نضع المصابيح الحمراء في الأعلى ، وهي نظائر "إشارات الانعطاف".هناك مكان منفصل للدائرة الصغيرة ، نقوم بإدخال الموصل هناك ، لذلك فإن استبداله في هذه الحالة سيكون أسهل بكثير ، لكن جهات الاتصال لن ترتفع درجة الحرارة عند اللحام.

الخطوة الرابعة
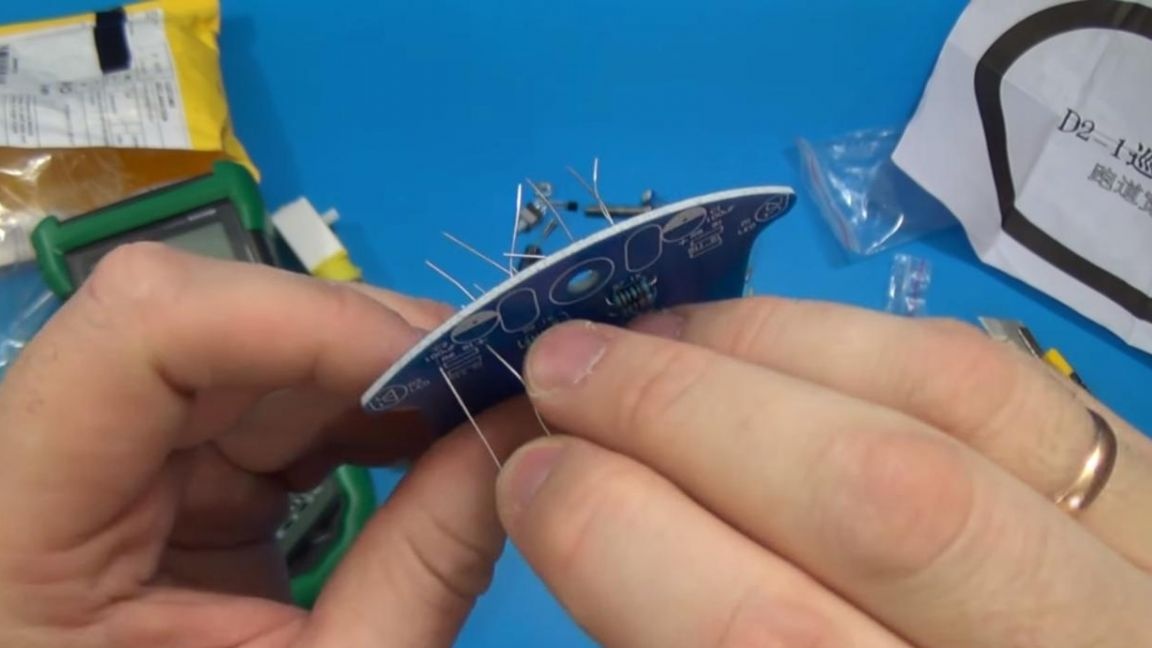
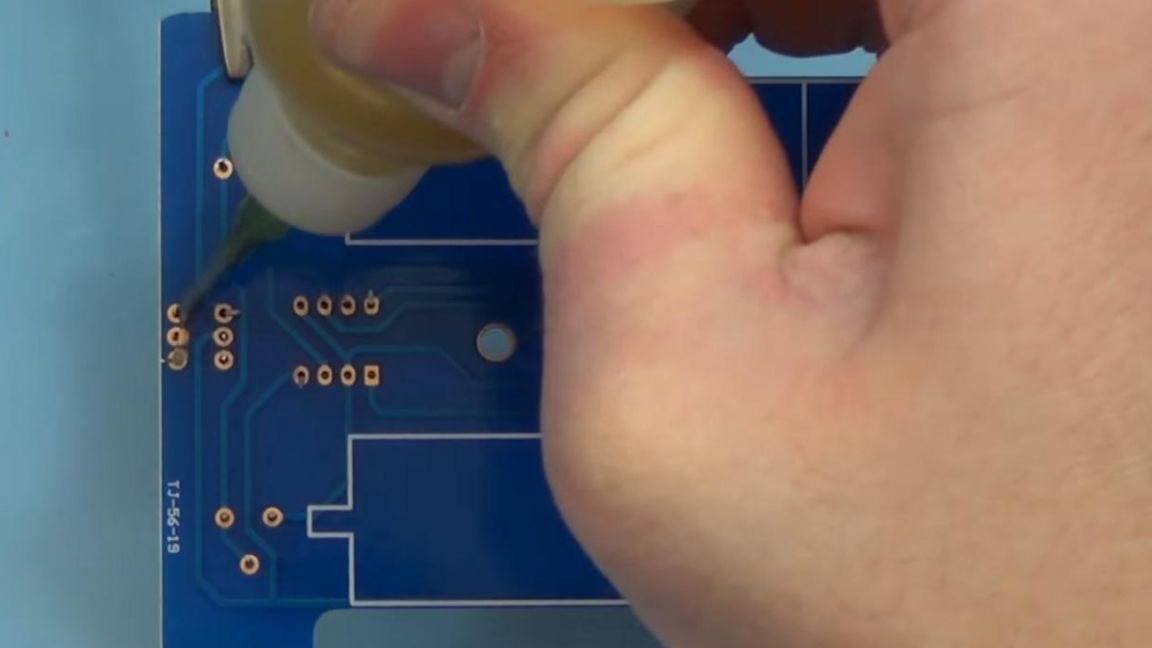
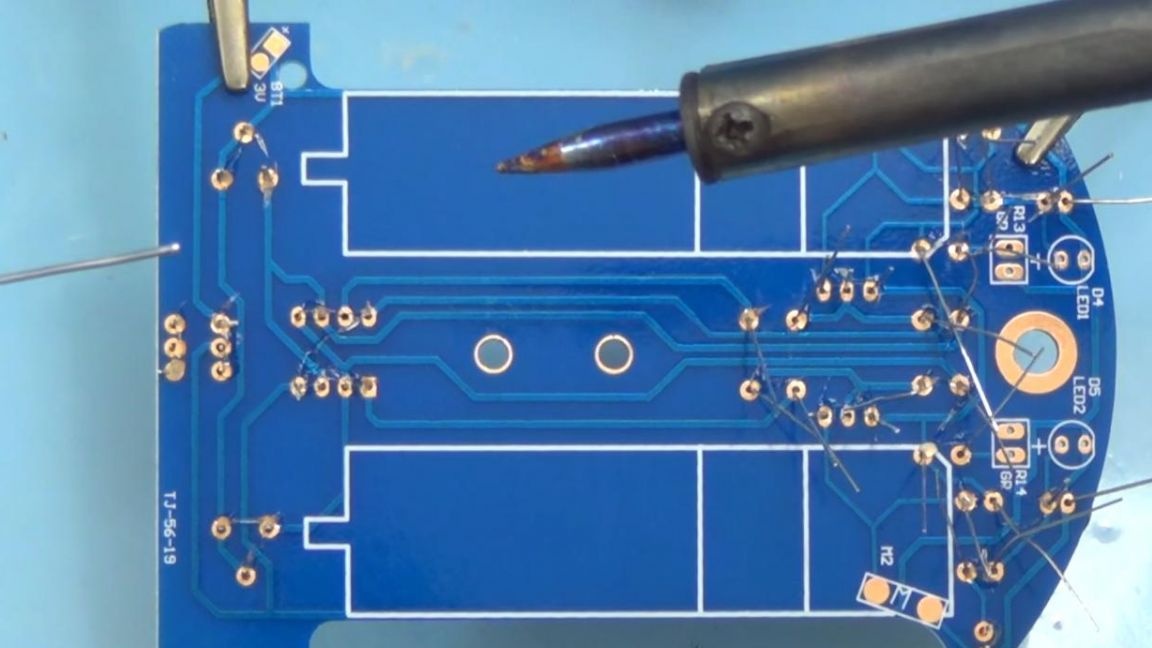
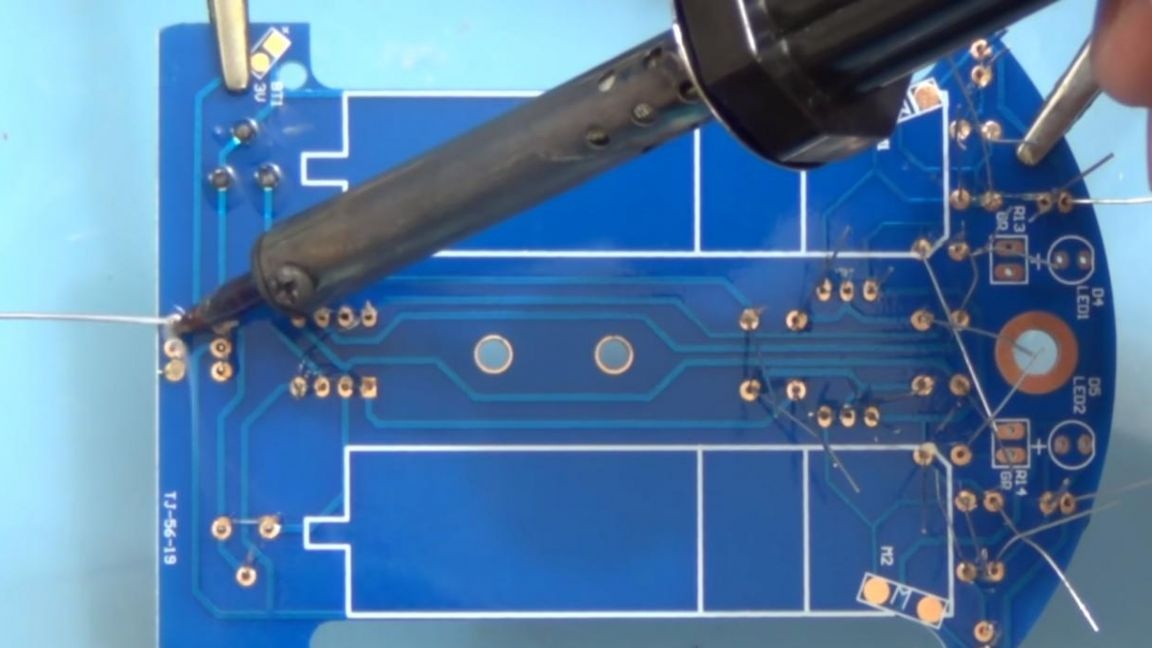
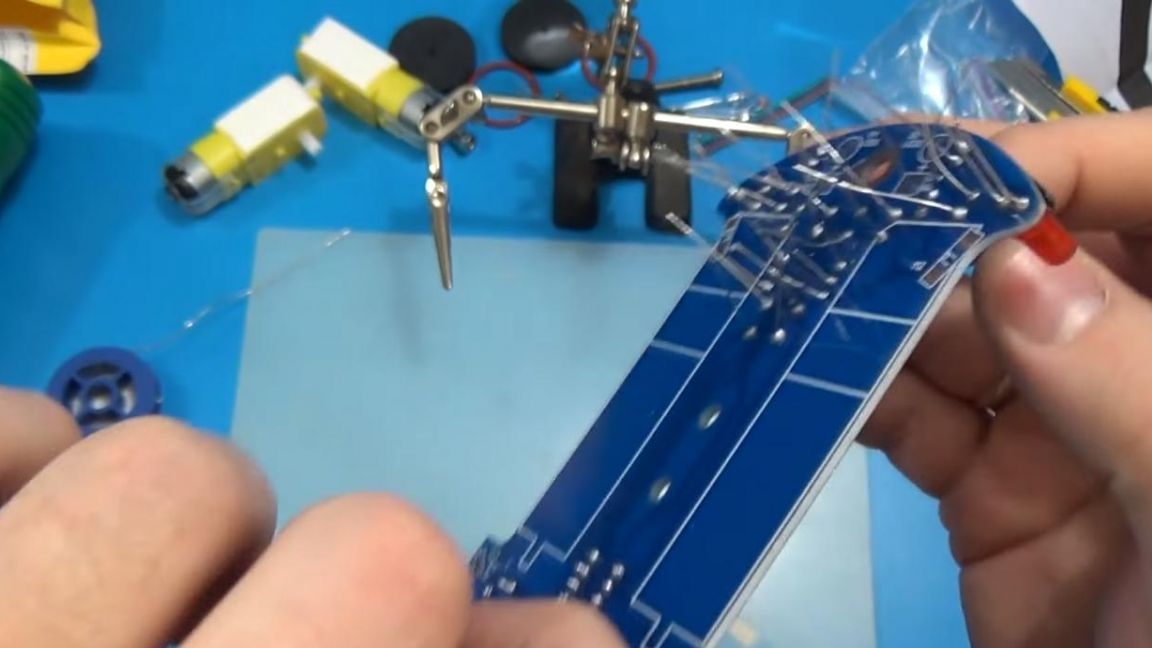
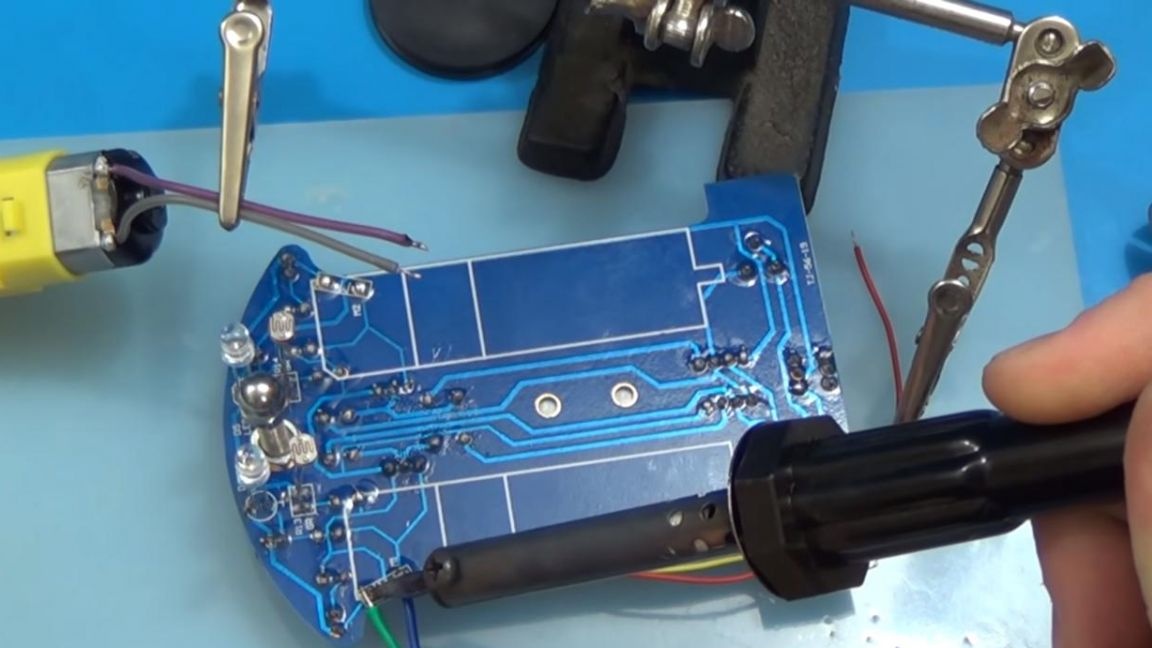
حان الوقت لحام المكونات الموضوعة على اللوحة ، وتثبيتها في جهاز اللحام غير المباشر ، وتطبيق التدفق واللحام ، وتغذية اللحام قليلاً.
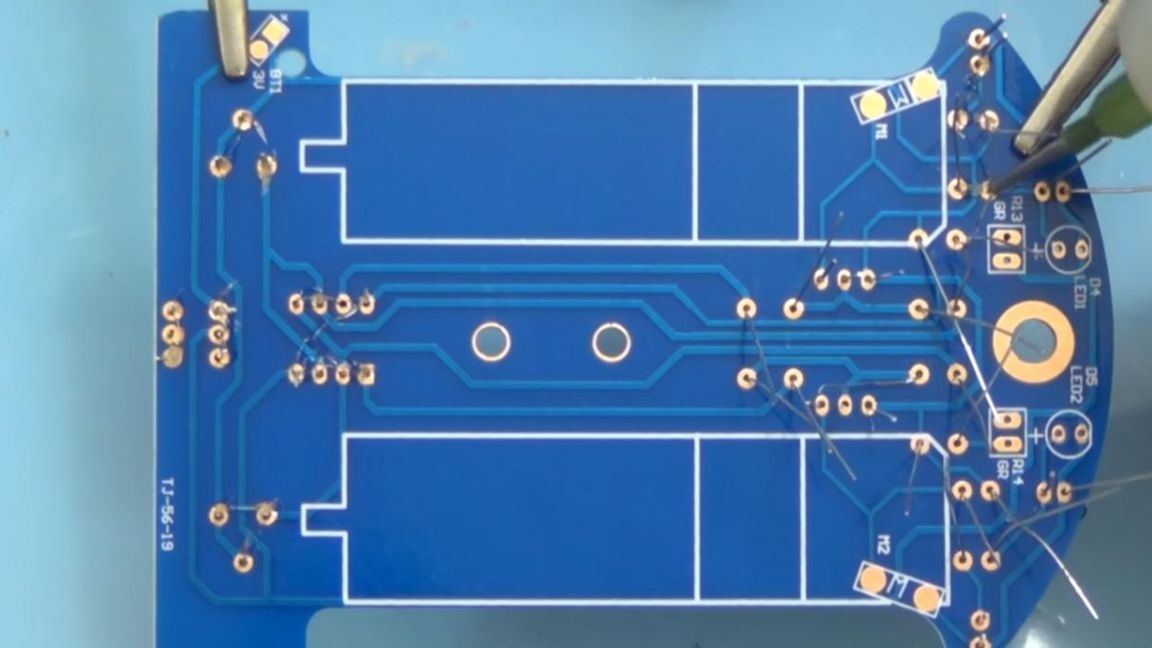
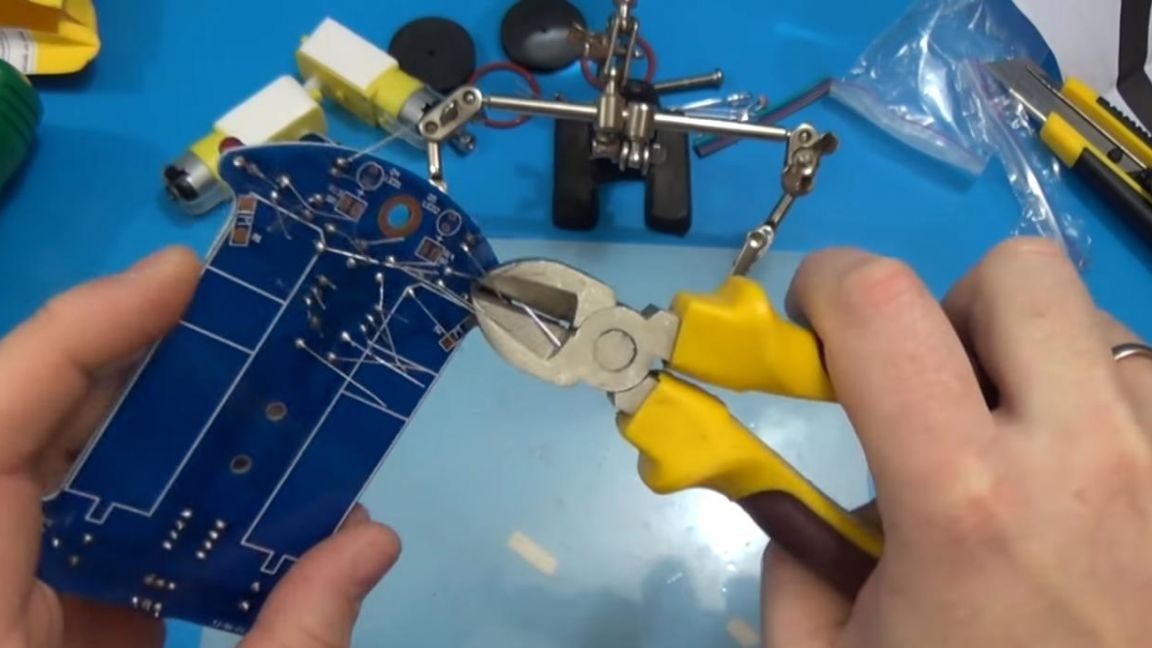
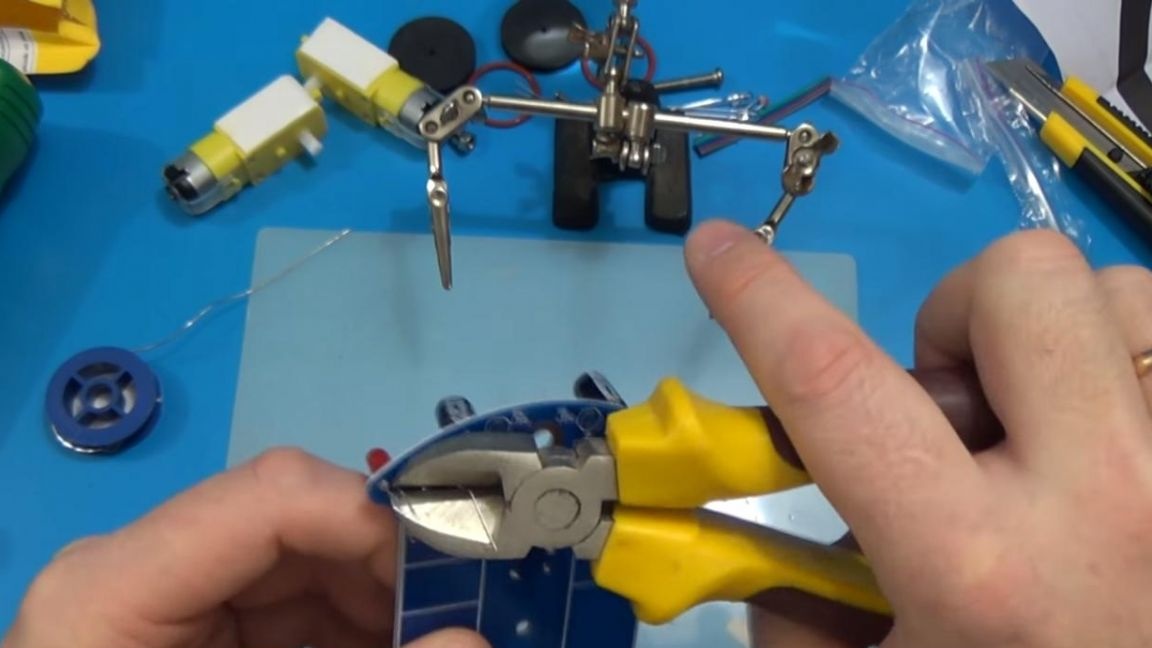
بعد اللحام ، نزيل بقايا الاستنتاجات بمساعدة القواطع الجانبية ، ولكن كن حذرًا في هذا ، حيث أن تمزيق منصات الاتصال ، وكذلك المسارات نفسها ، أسهل في هذه المرحلة.
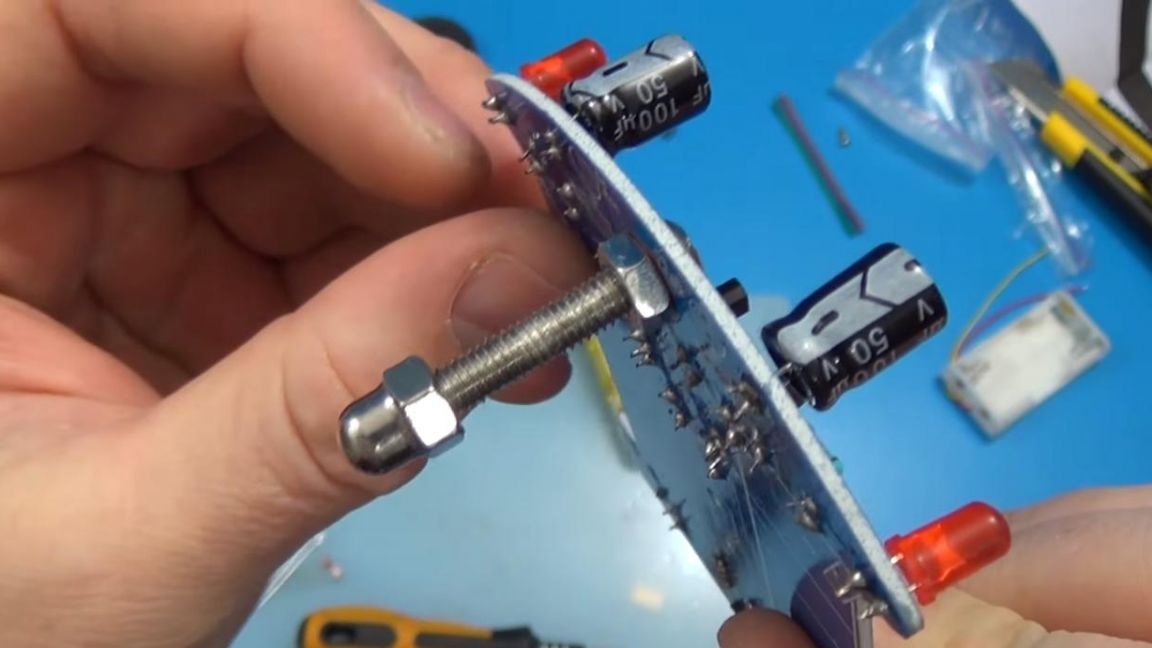
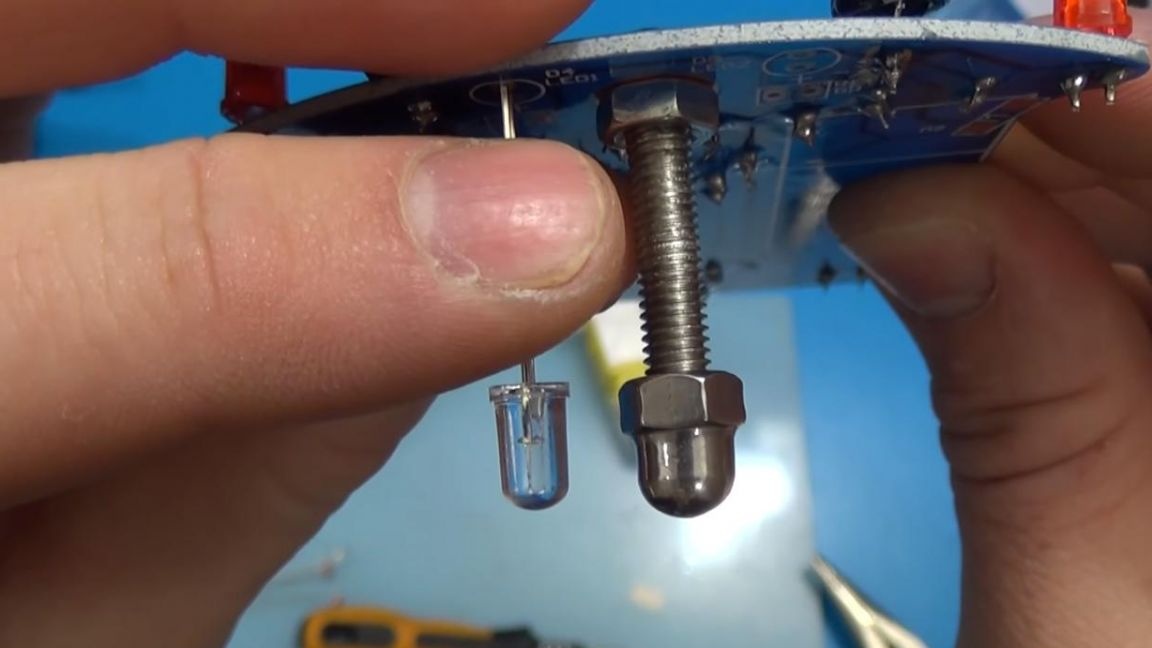
الخطوة الخامسة
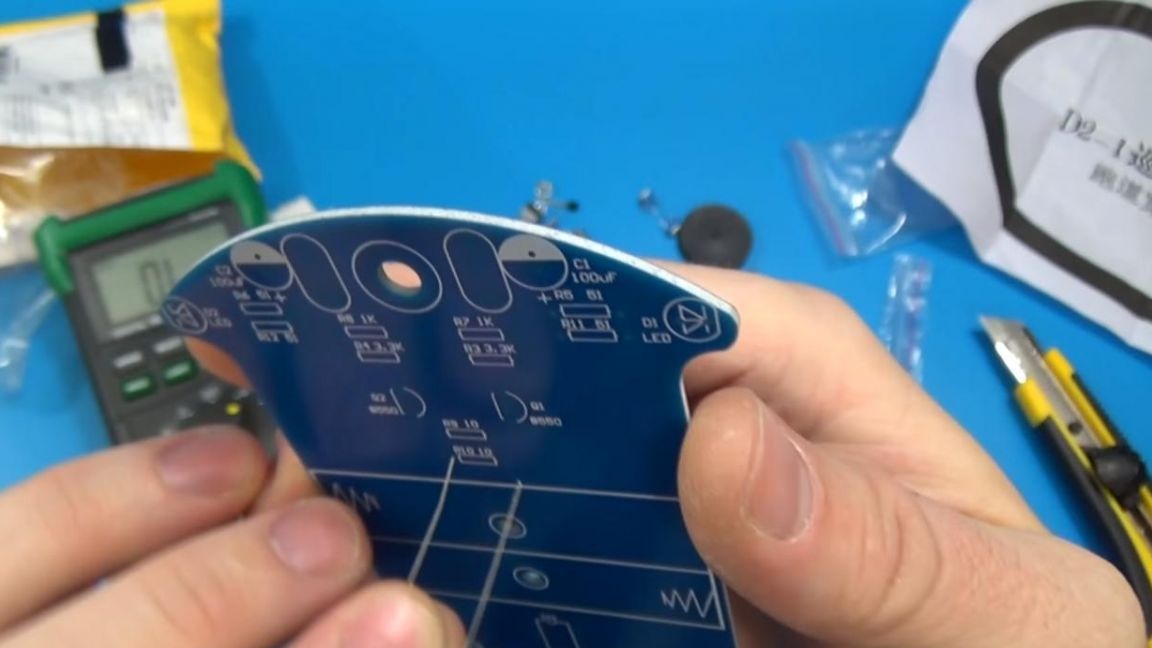
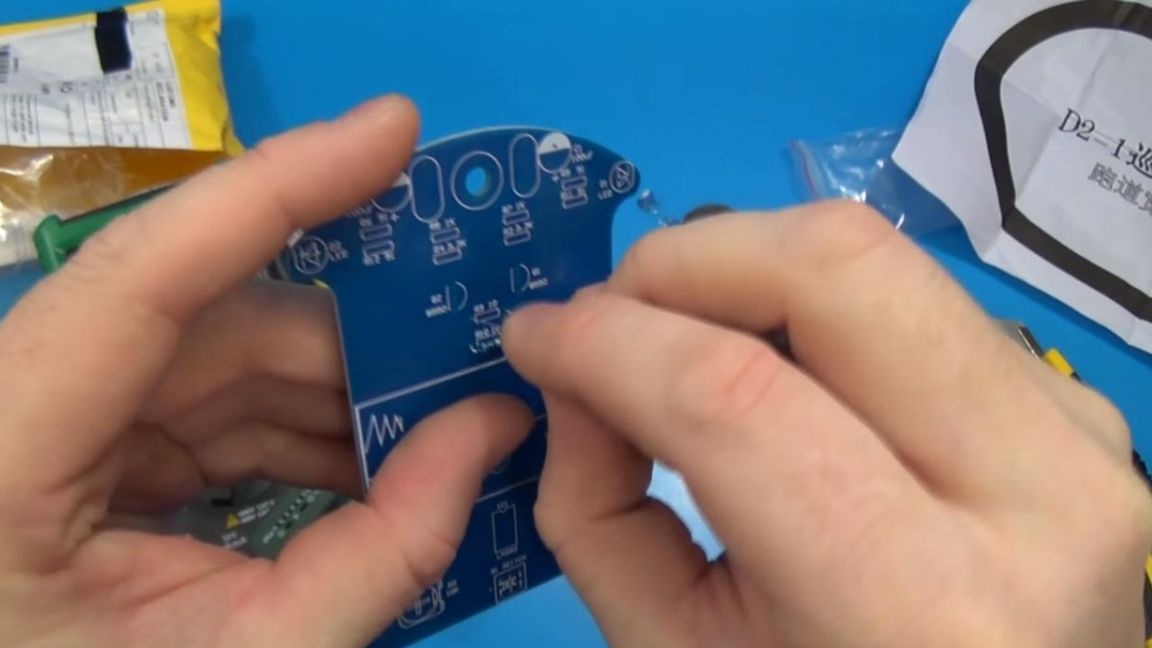
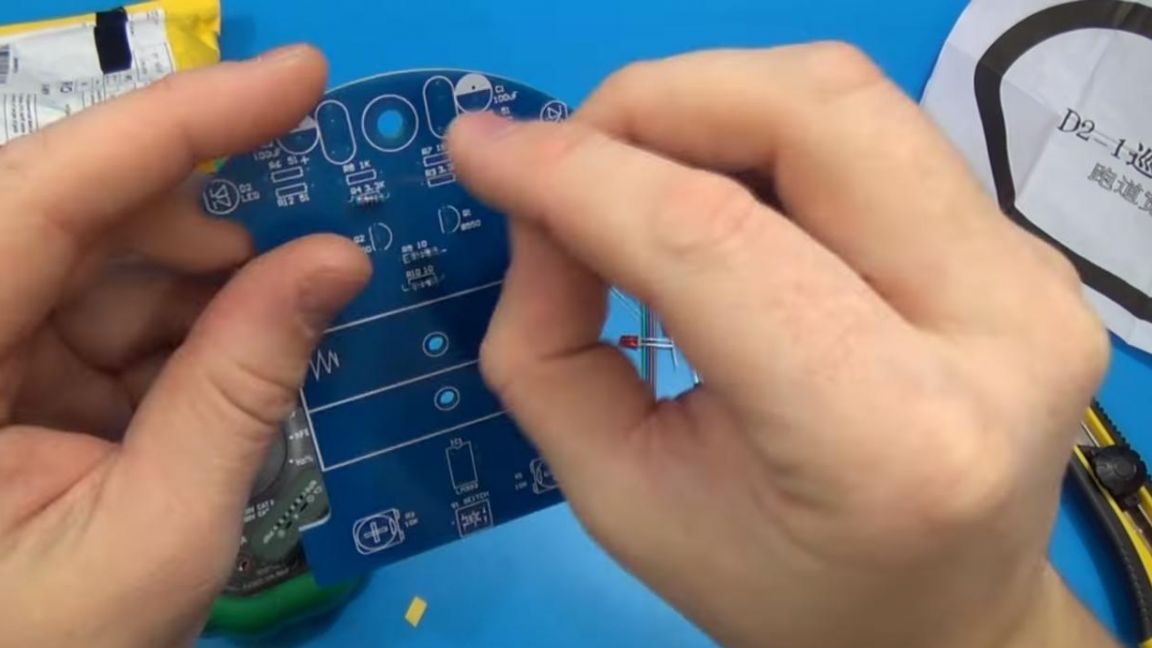
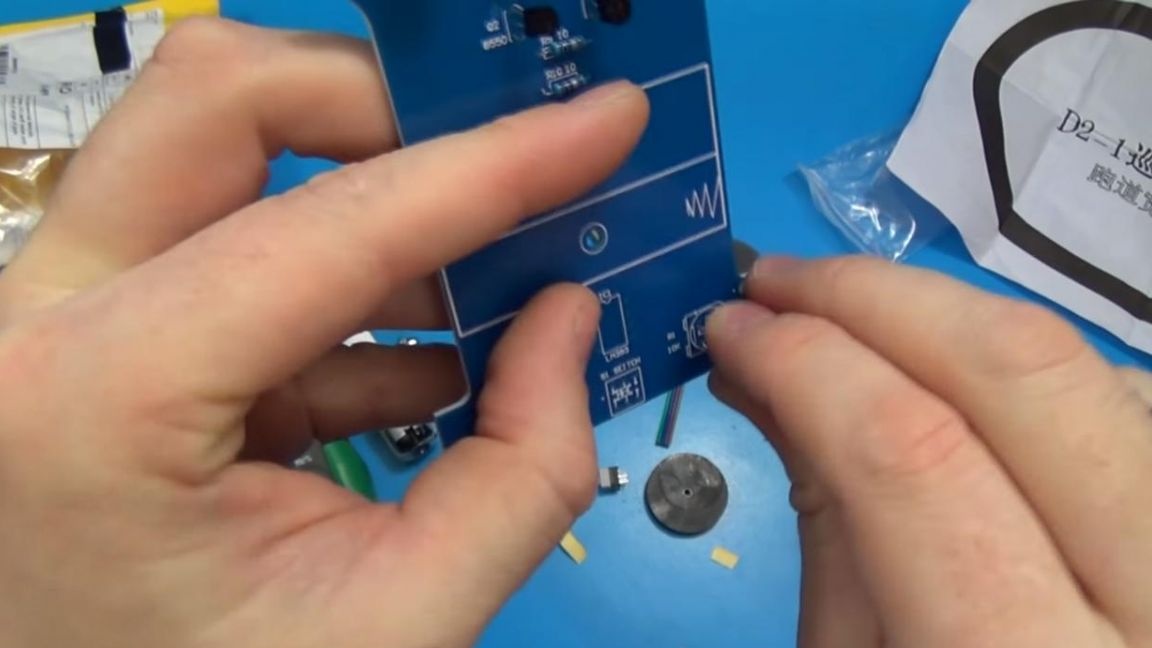
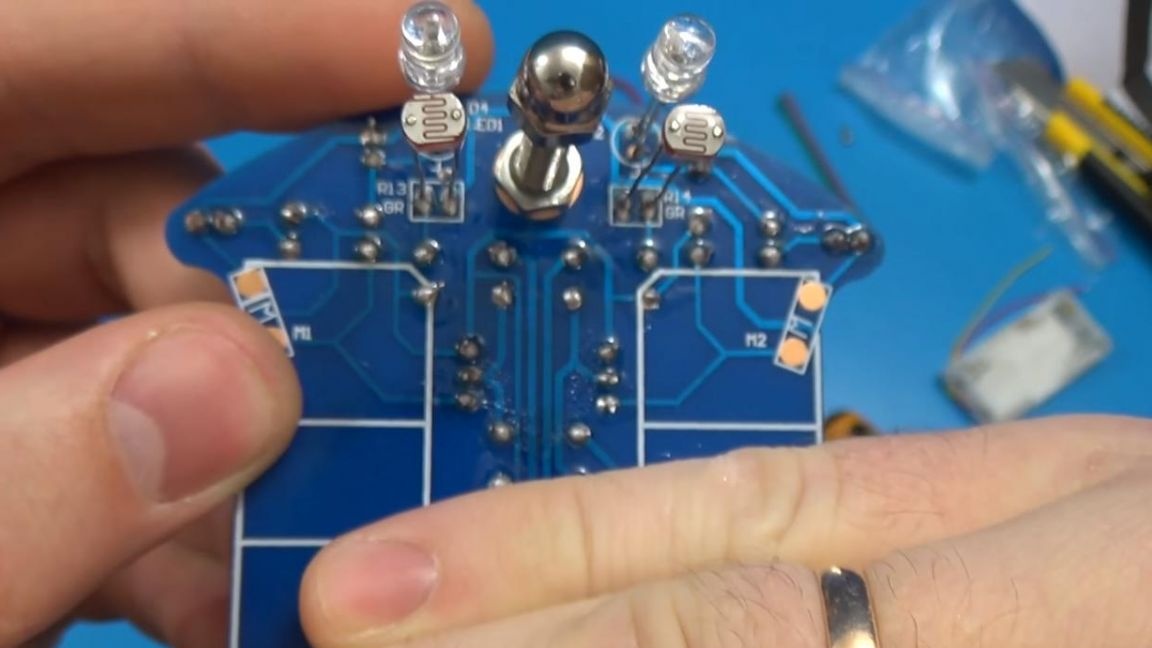
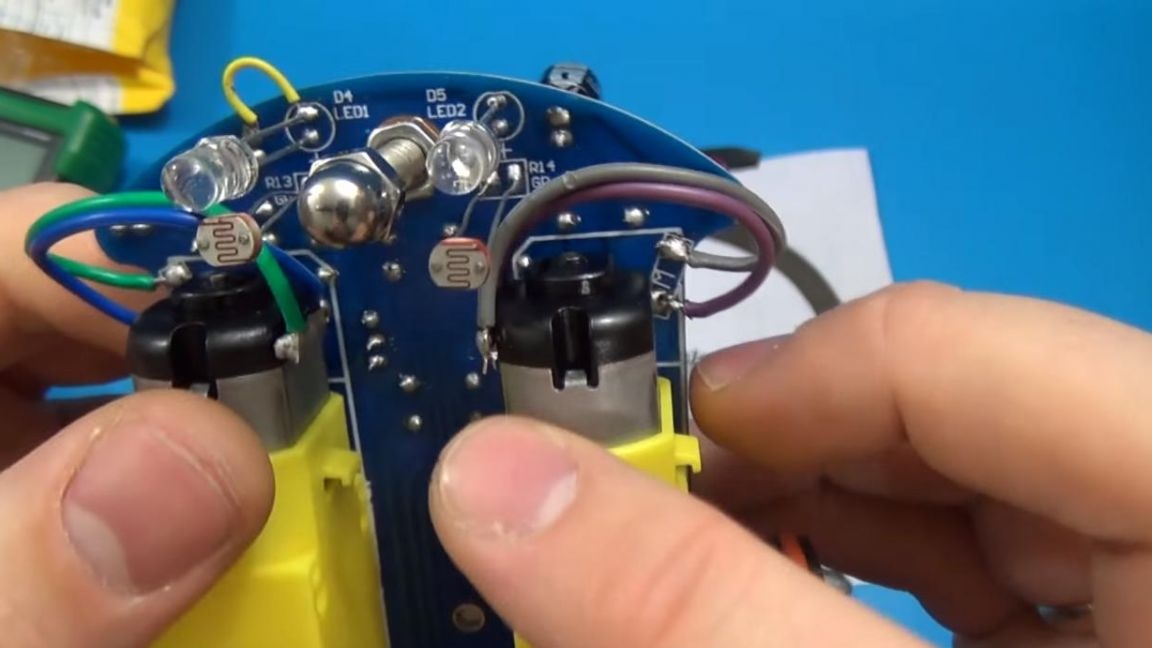
الآن نقوم بربط المسمار على اللوحة ونقوم بتثبيت مصابيح LED بيضاء بجانبه ، يجب أن تكون المسافة أقل من 1-2 مم من امتداد المسمار ، ويمكن رؤيته بوضوح في الصورة ، إذا لم يتم ملاحظة ذلك ، فستعمل المقاومات الضوئية بشكل أسوأ أو لا تعمل على الإطلاق .

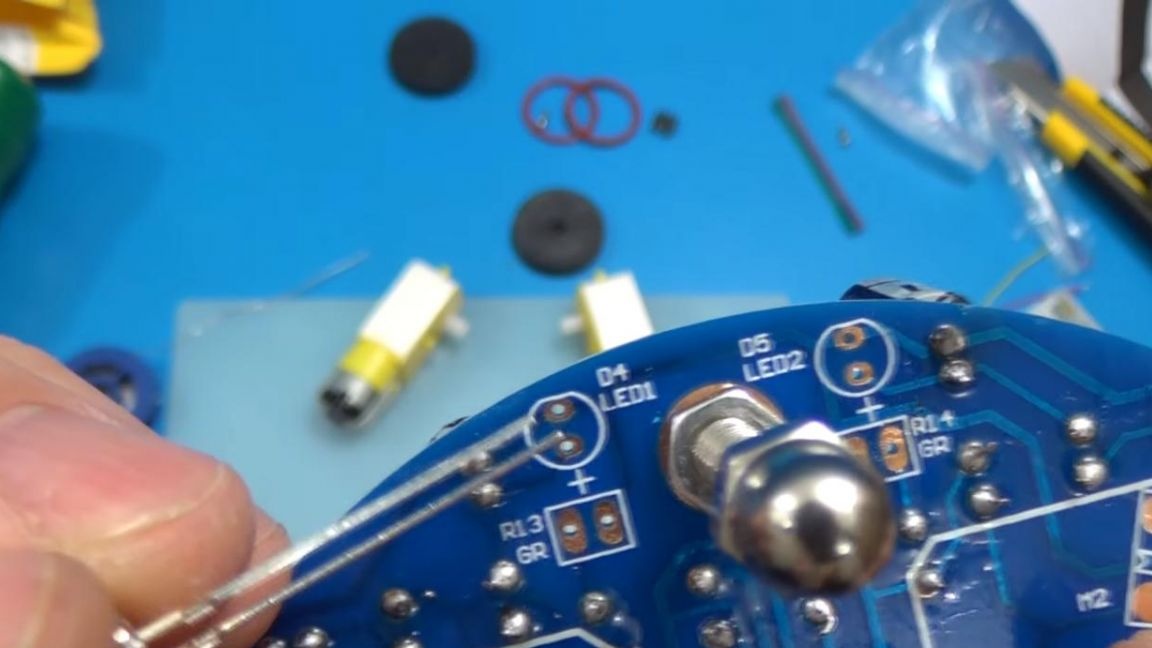
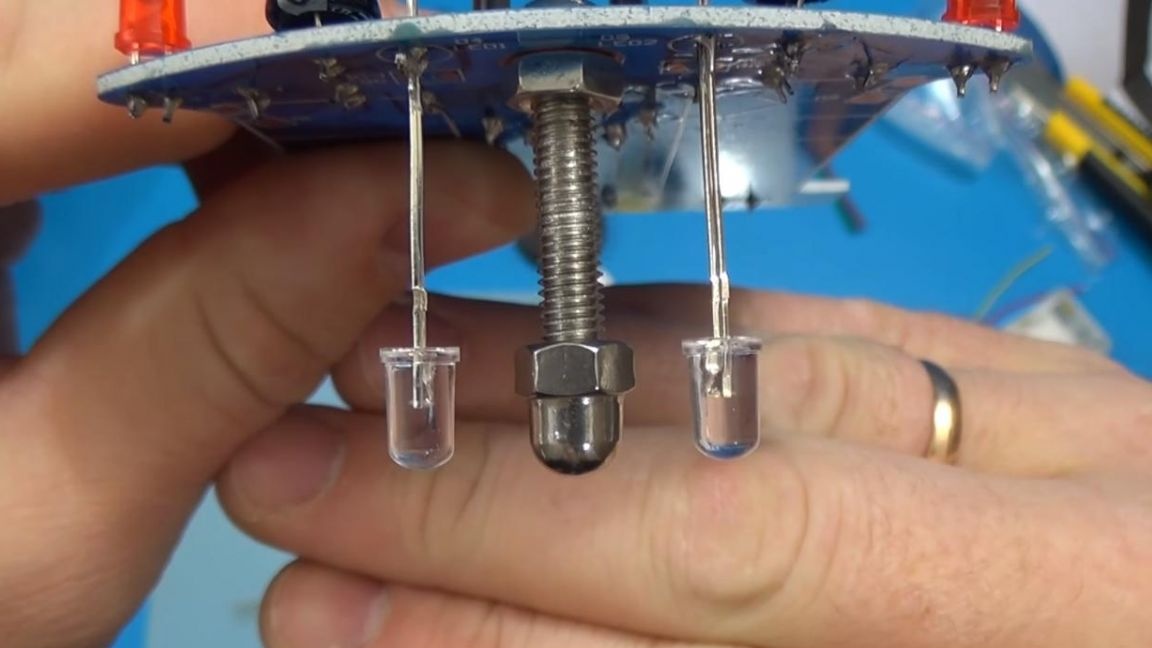
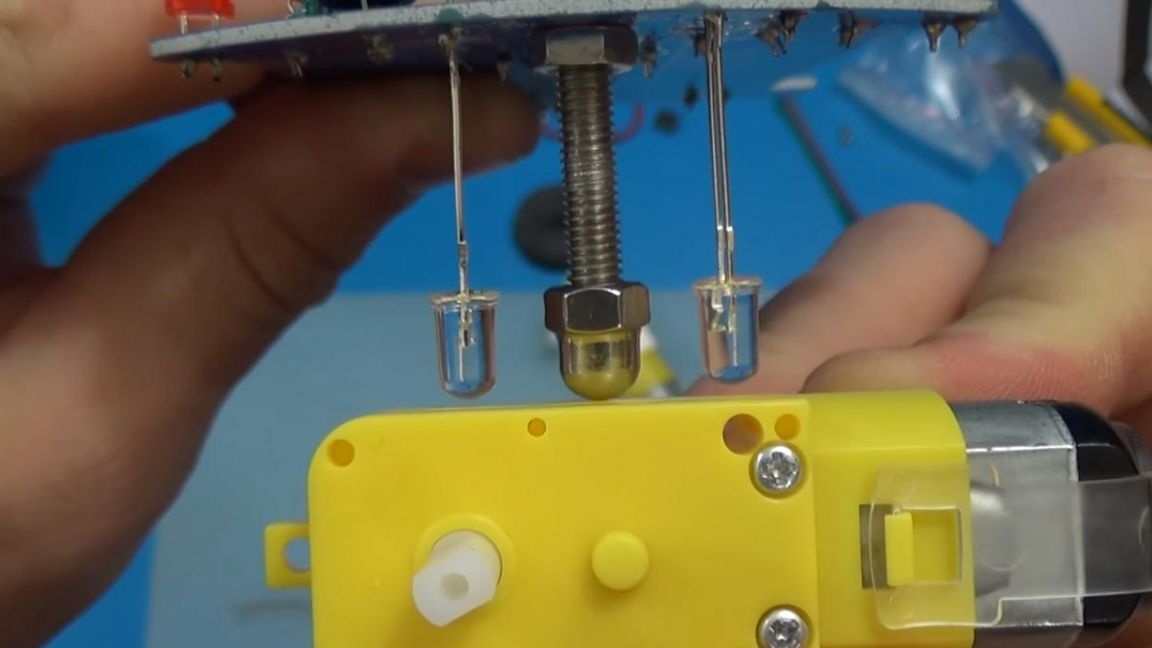
بجانب اللوح ، قم بلحام مقاومات الضوء على نفس المسافة مثل مصابيح LED.

الخطوة السادسة
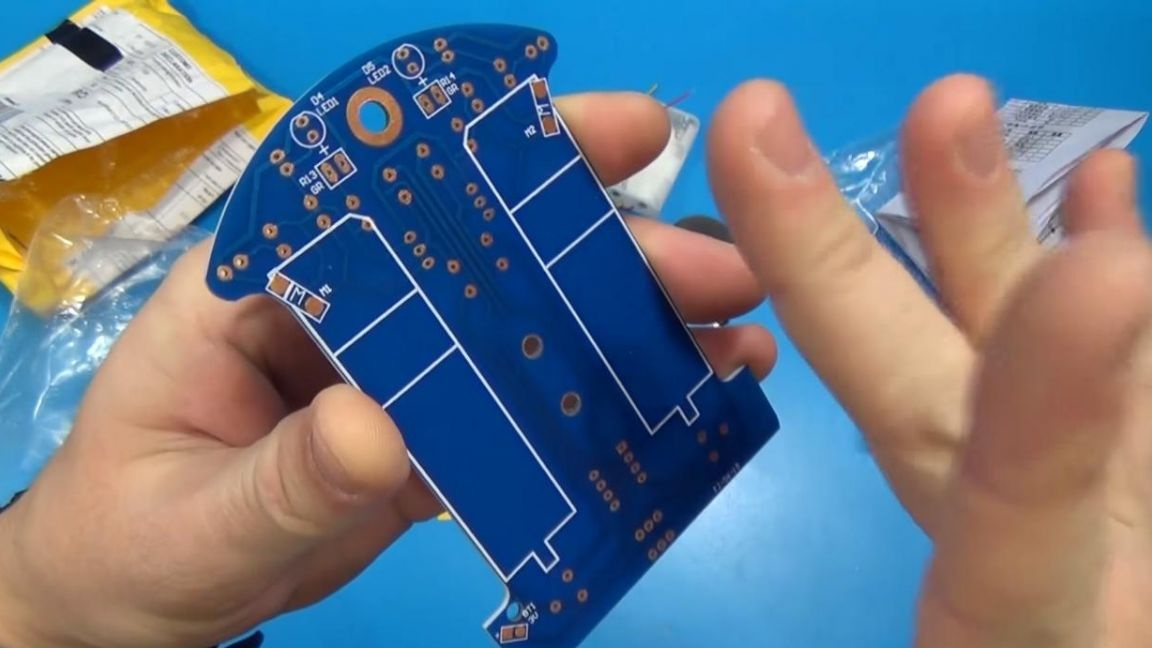
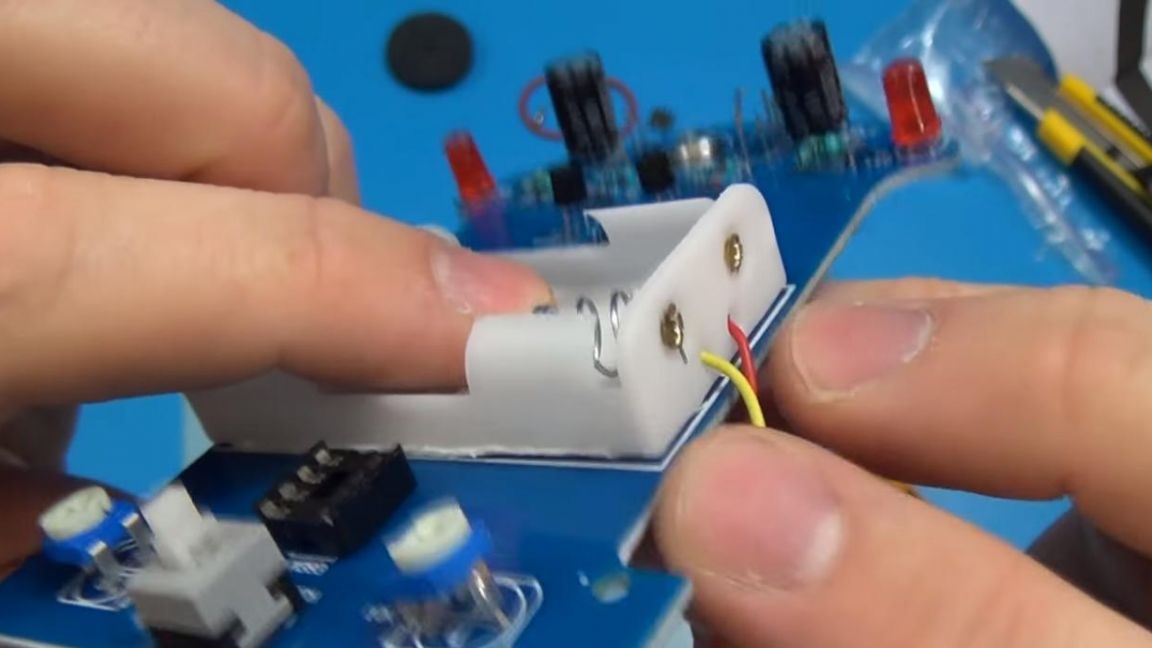
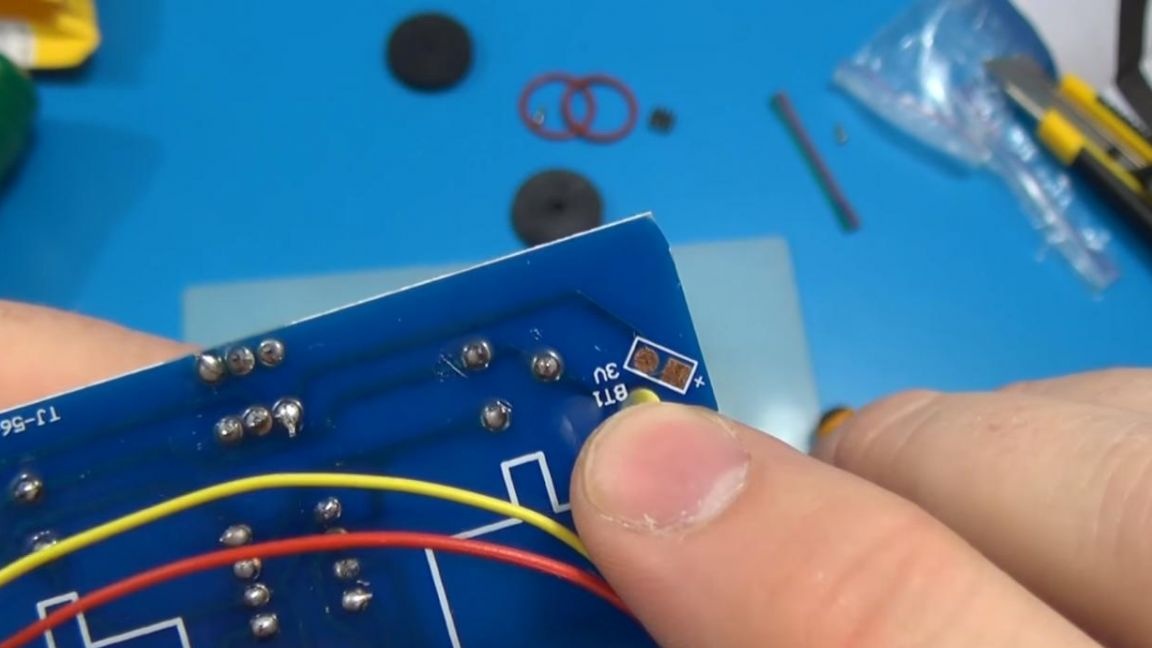
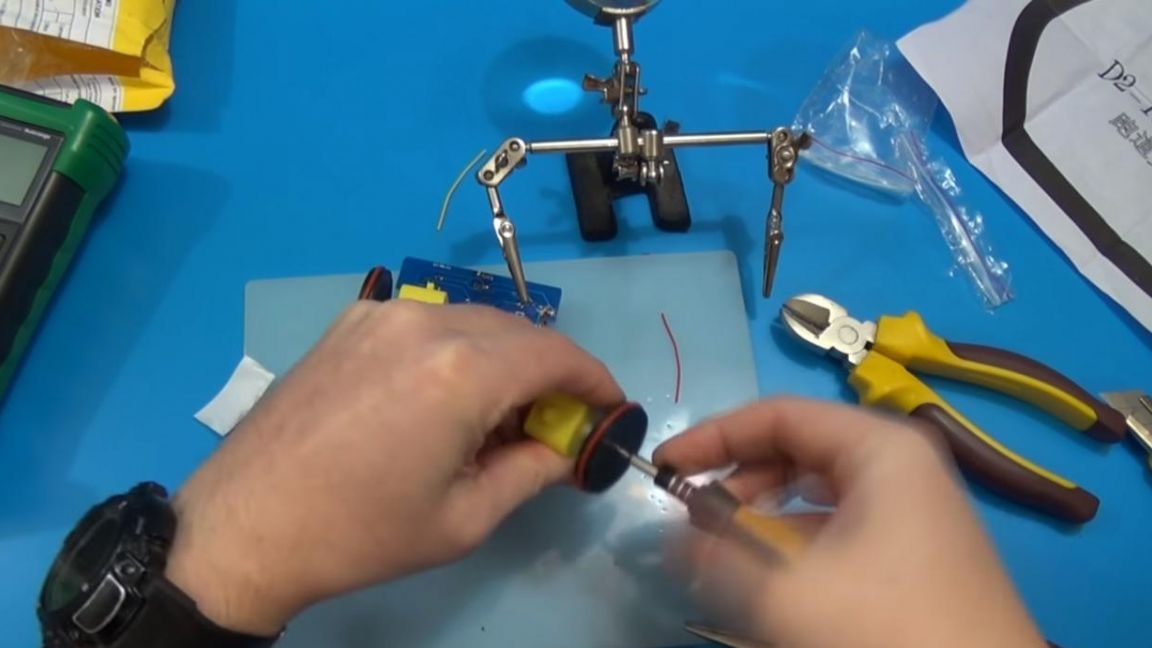
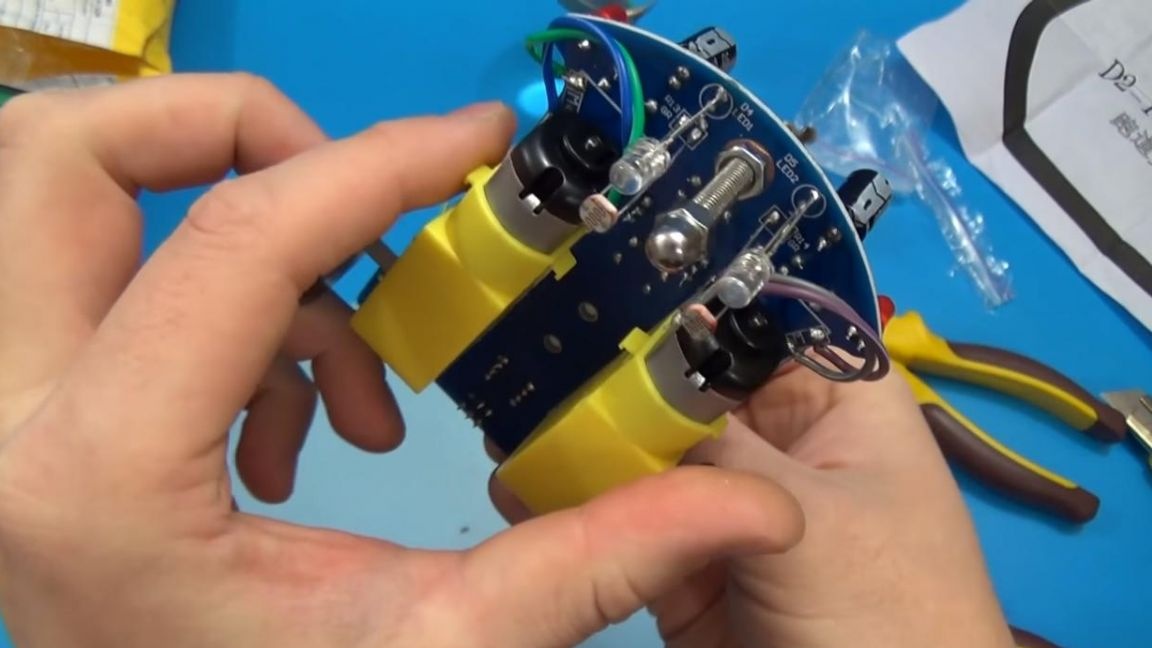
ثم نأخذ المحركات مع التروس ، ويجب تلامس جهات الاتصال الخاصة بهم وتلحيم سلكين لهم ، كما نقوم بغراء حالة تثبيت بطاريات AAA ونلحم السلك الأصفر في الطرح والسلك الأحمر إلى الإضافة ، حيث يتم توقيعه على اللوحة.
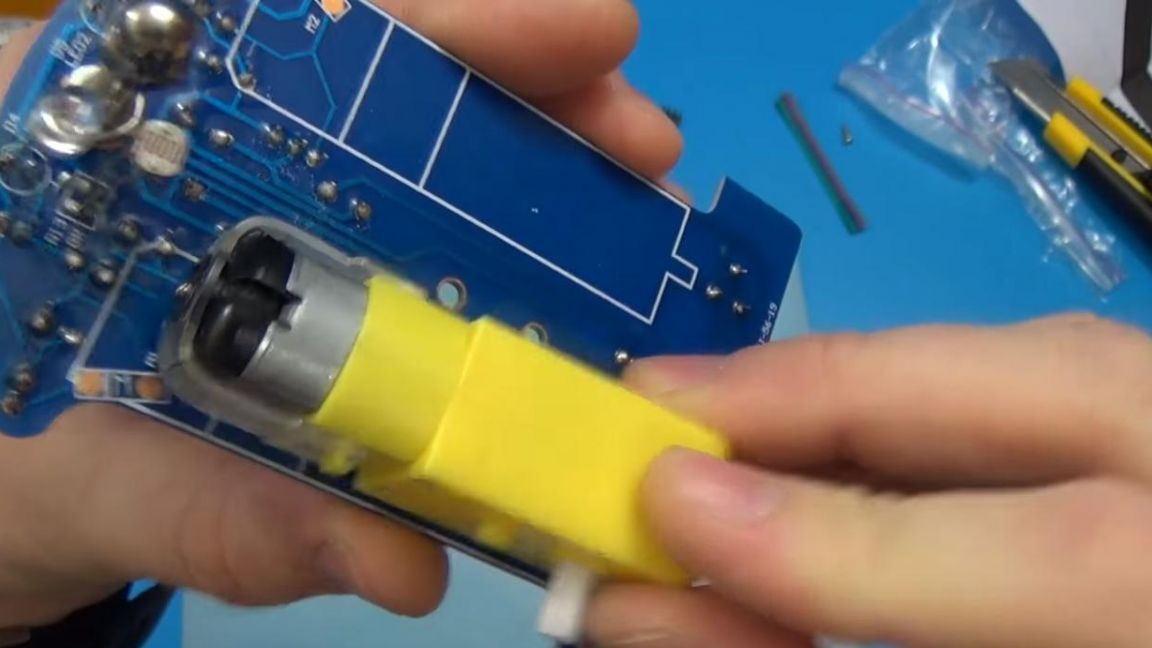

قبل إرفاق المحركات ، تحتاج إلى ربط العجلات بها ، والتي يتم تثبيتها بمسمار واحد ، ويتم وضع وسادة مطاطية على العجلة نفسها من أجل قبضة أفضل.
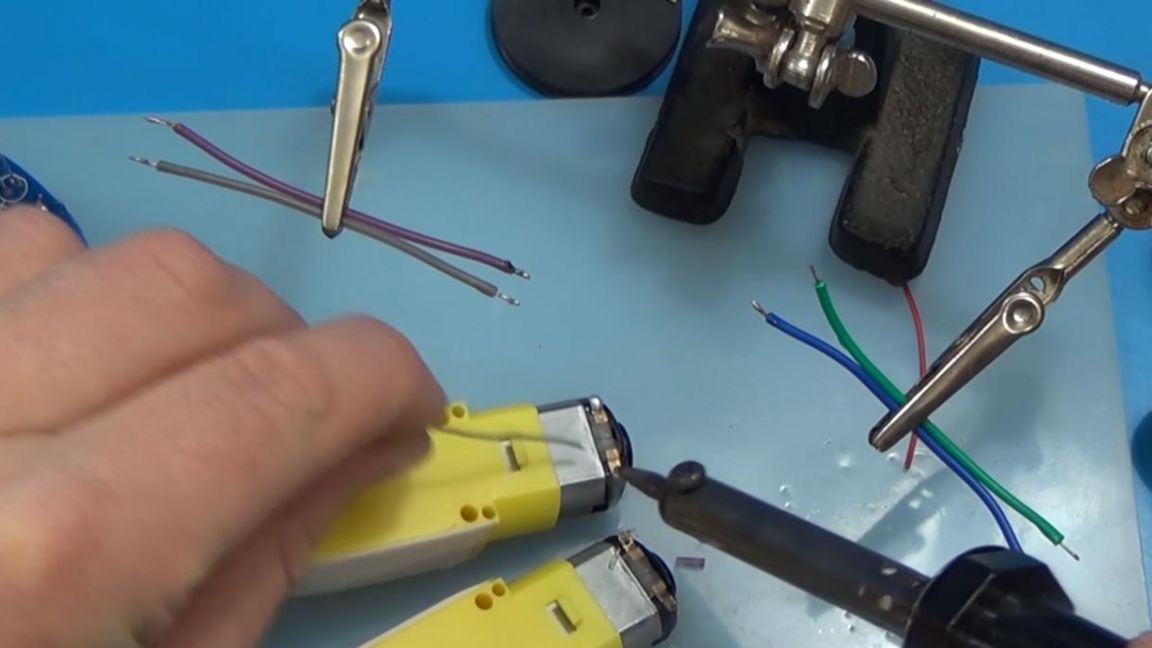
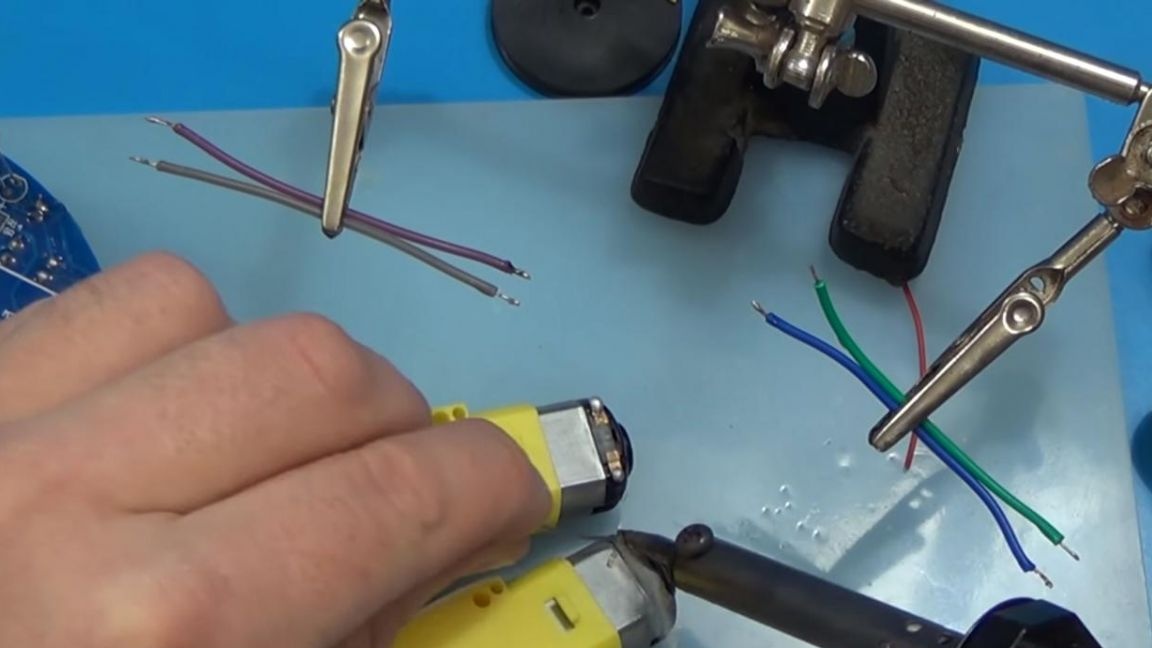

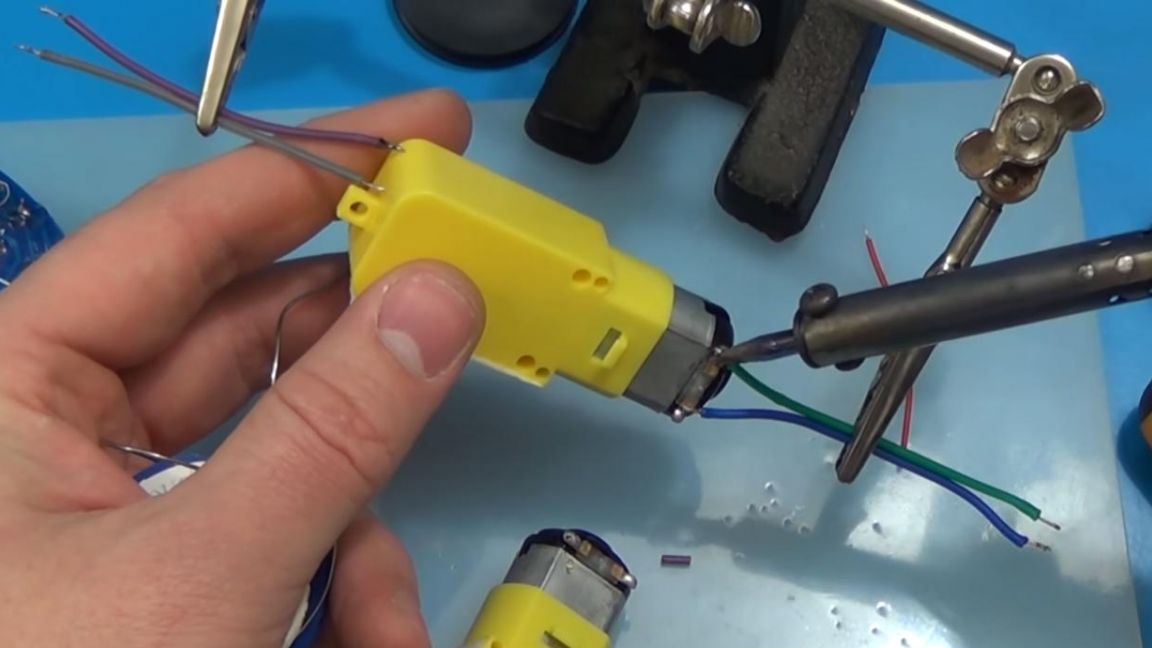
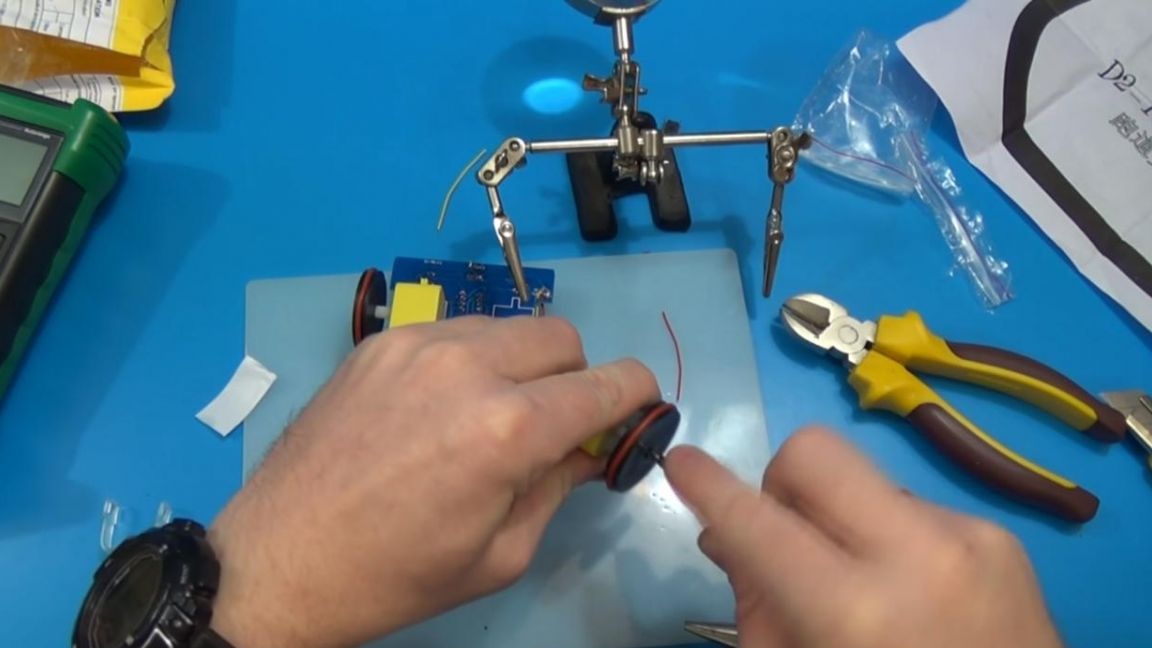
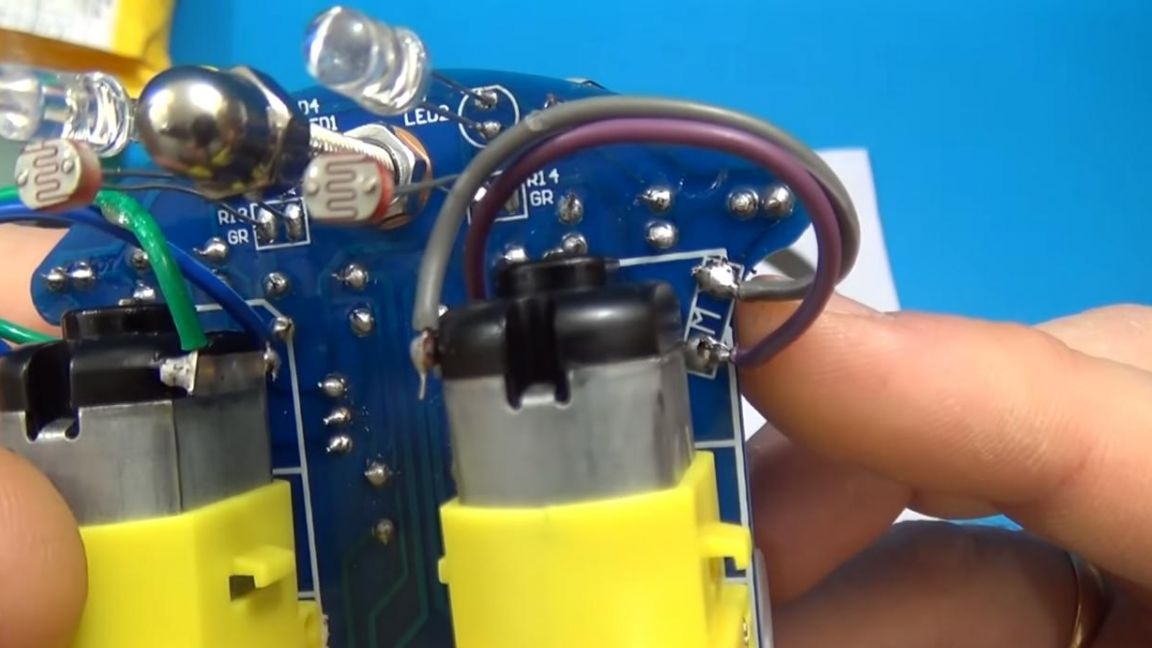
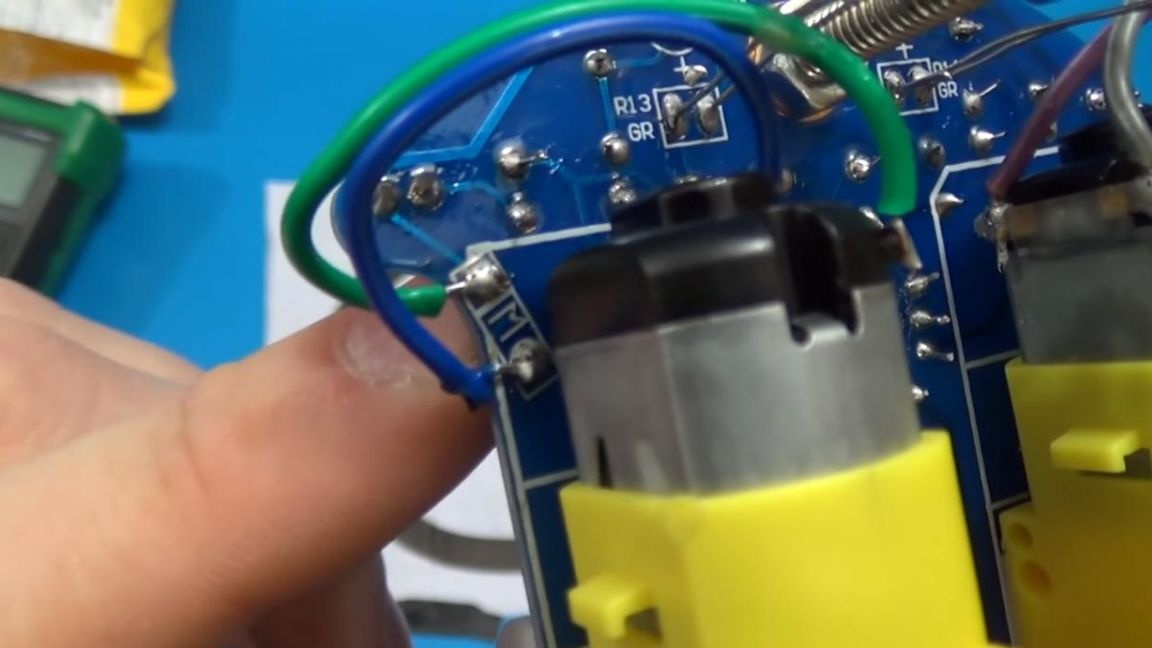
نحن نلحم الأسلاك من المحركات إلى اللوح ، لسوء الحظ أين هو زائد ، وحيث لا يشار إلى السالب هنا ، ولكن من خلال التجربة والخطأ وجد أن الاتصال العلوي للمحرك يجب أن يكون متصلاً بالجزء العلوي على اللوح باستخدام سلك وحديد لحام ، مع الجزء السفلي ، على التوالي ، نفعل نفس الشيء .
حسنًا ، في نهاية التجميع ، يبقى تثبيت الدائرة المصغرة على اللوحة في مكانها الصحيح ، ودمج المفتاح مع اللوحة وإدخال البطاريات ، مع مراعاة القطبية.

الخطوة السابعة.
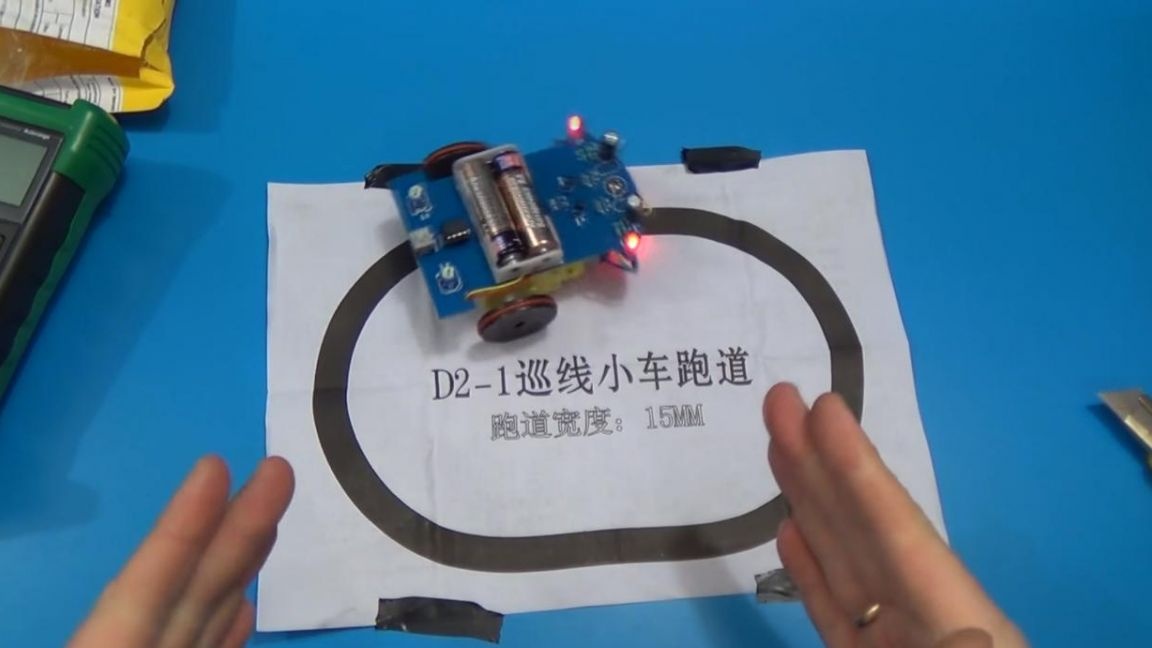
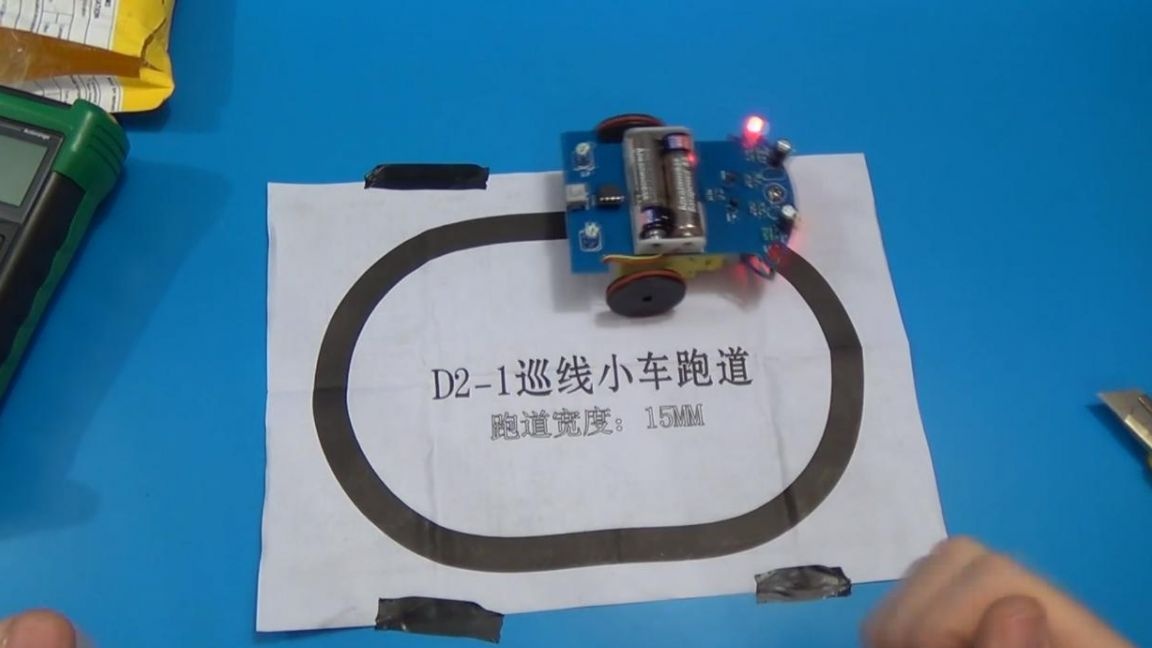
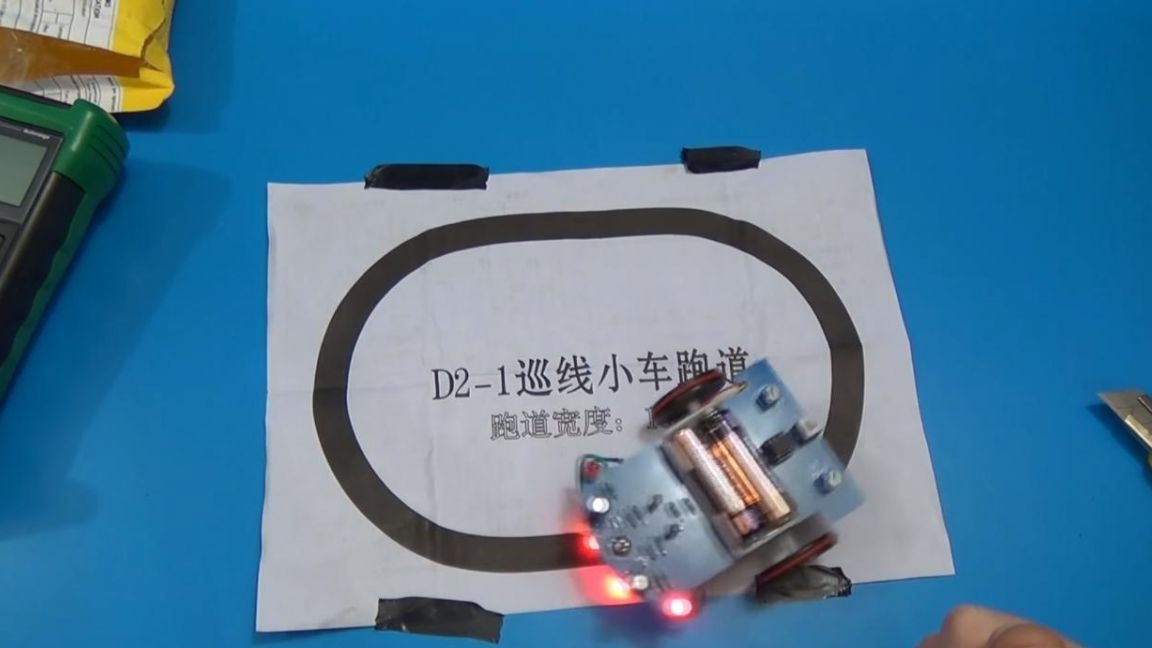
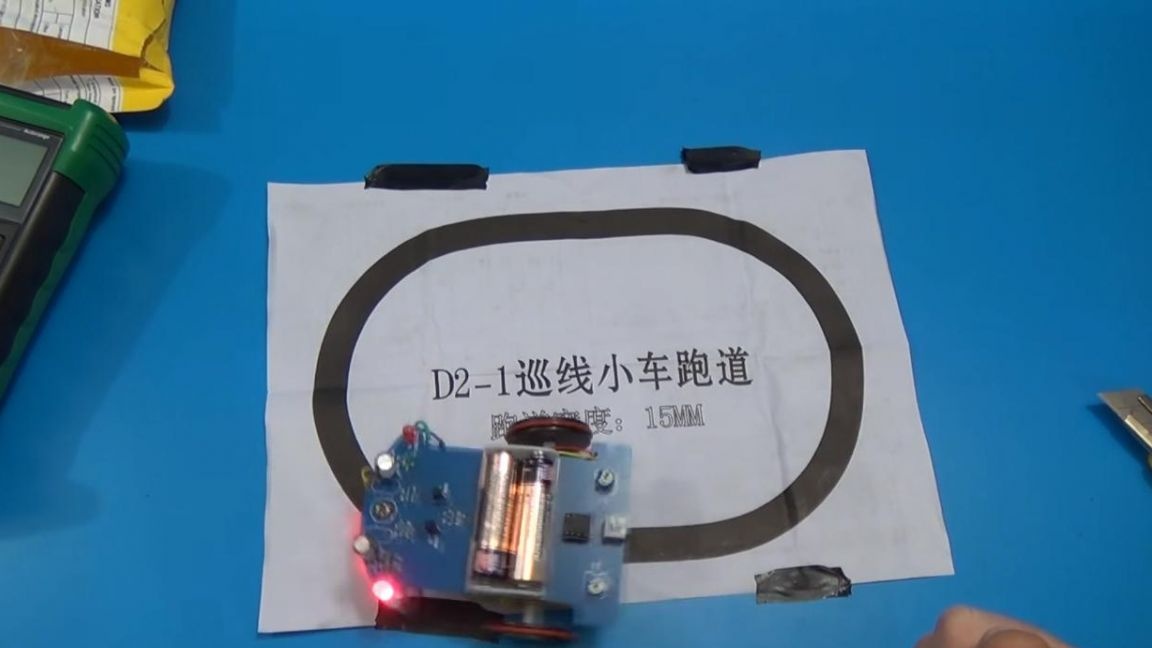
لذلك حان الوقت لاختبار هذا الروبوت ، تضمنت المجموعة تعليمات على الظهر تم رسم شكل بيضاوي عليها بخط بعرض 15 ملم ، وهي القيمة المثلى.
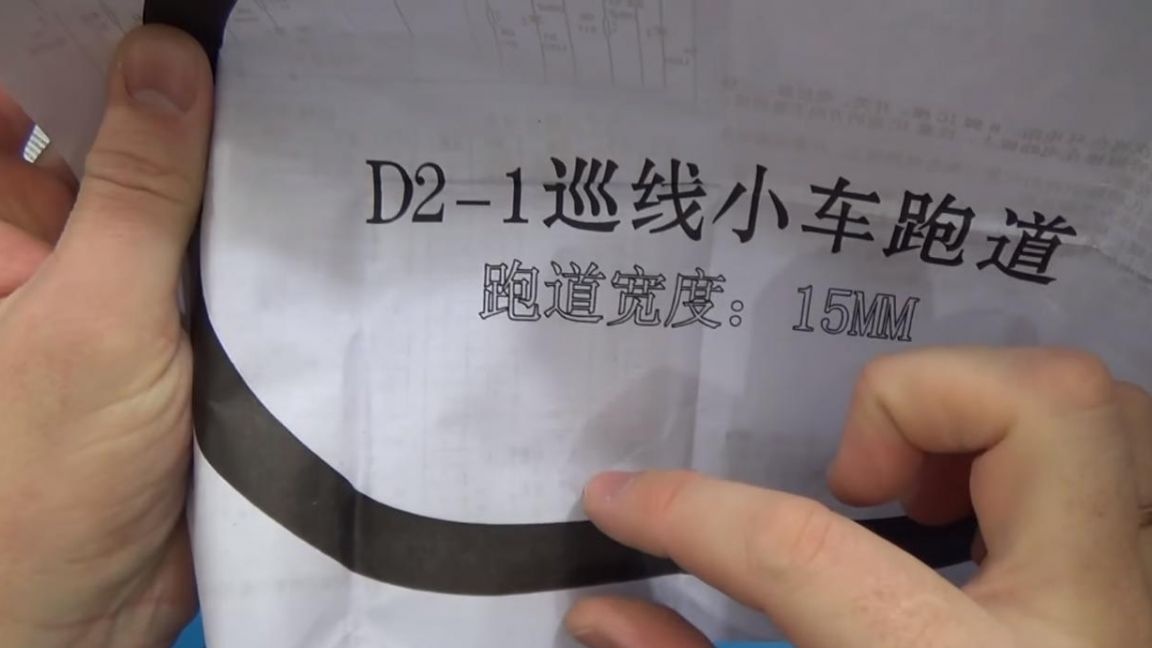
اضغط على زر الطاقة و الروبوت ذهبت ، من أجل عمليته الصحيحة ، لا يجب أن تكون الخطوط حادة ، أي أنه لن يتمكن من القيام بمنعطفات حادة. على سبيل المثال ، يمكنك عمل مسار بسلاسة من خلال تطبيق شريط عازل بعرض 15 ملم على طلاء متساوي.
هذا كل شيء بالنسبة لي ، شكرا لكم جميعا على اهتمامكم ونجاحكم الإبداعي.