


من أو ما هو بي بي سي ثمانية؟ بي بي سي ثمانية هي شخصية في ملحمة حرب النجوم الأسطورية. ظهرت BBC ثمانية لأول مرة في الحلقة السابعة: The Force Awakens. في وقت لاحق ، ظهرت نماذج الروبوت للبيع. الروبوت يتحرك. يتم التحكم في الروبوت باستخدام هاتف ذكي أو ذراع تحكم. ميزة مثيرة للاهتمام للروبوت هي رأسه. يتم خلط رأس الروبوت في جميع أنحاء الجسم ويبدو مضحكًا جدًا. على علي بي بي سي ، ثمانية تكاليف من 1500 ص. قرر سيدنا أن يجعل بي بي سي ثمانية بنفسه.
الأدوات والمواد:
- بطاريات AA-4pcs ؛
- حجرة البطارية AA ؛
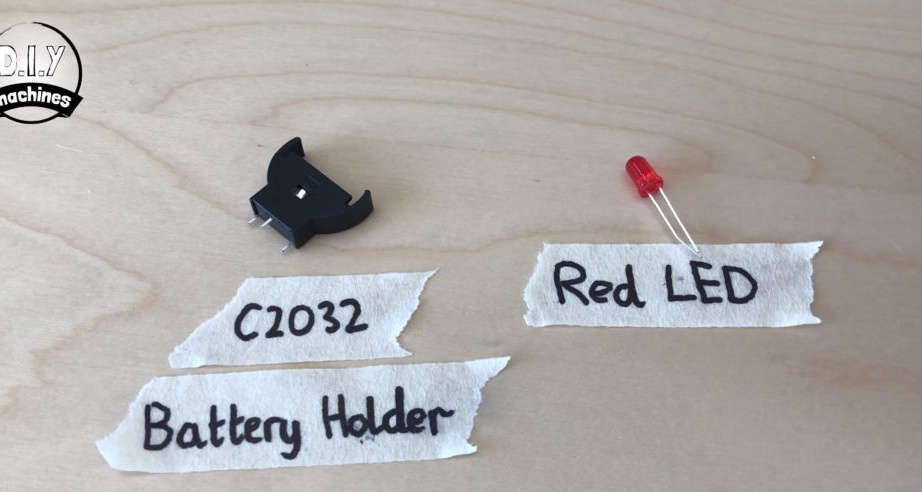
- بطارية CR2032 ؛
- حجرة البطارية CR2032 ؛
-طلاء أيروسول ؛
-العلامات.
طابعة ثلاثية الأبعاد
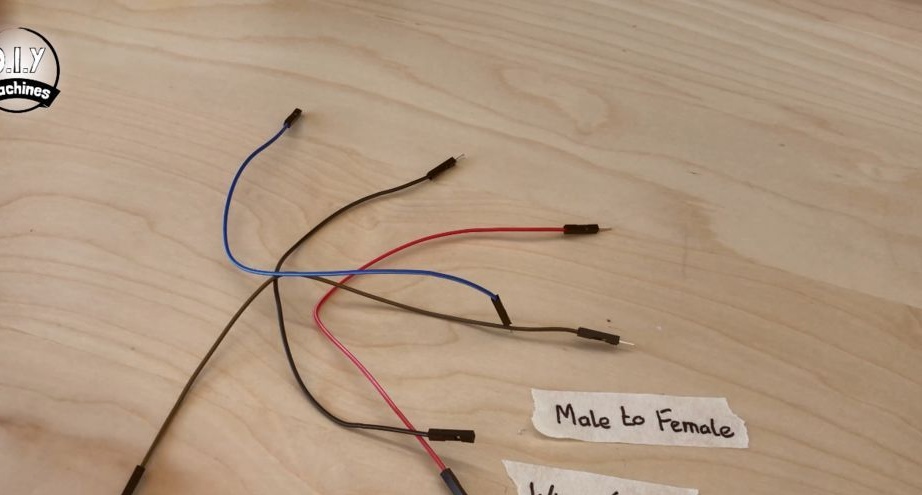
-سلك.
- لحام حديد
- ربط الكابلات ؛
- مسدس غراء
- قطع الرغوة.
الصمام الأحمر.
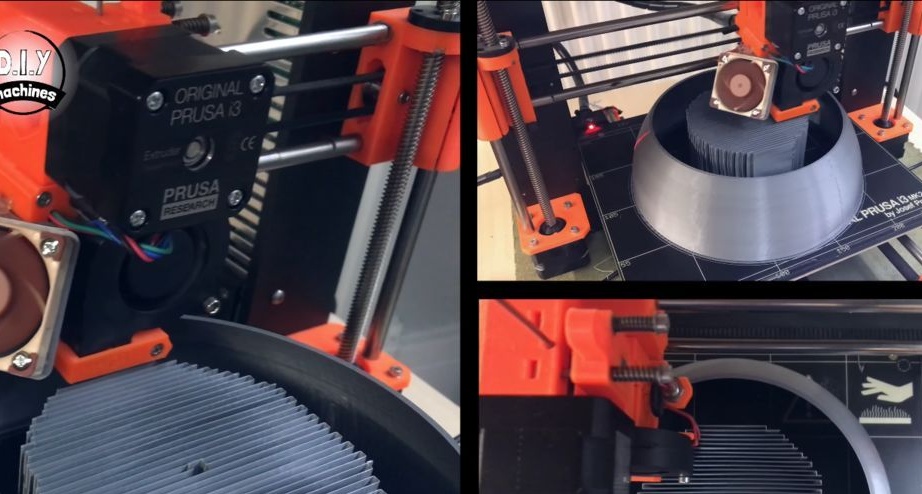
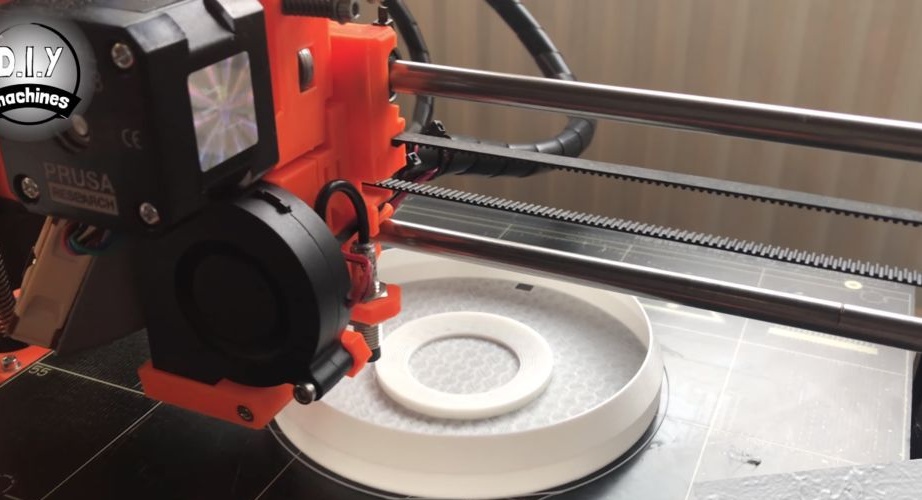
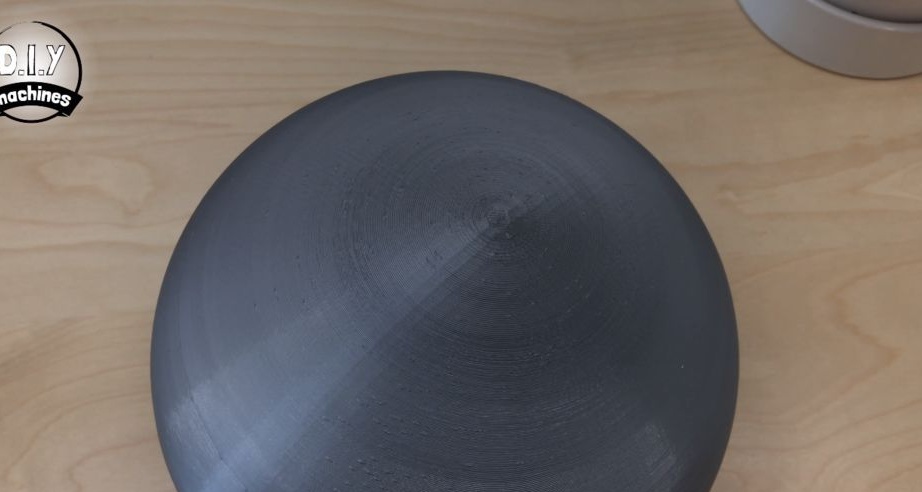
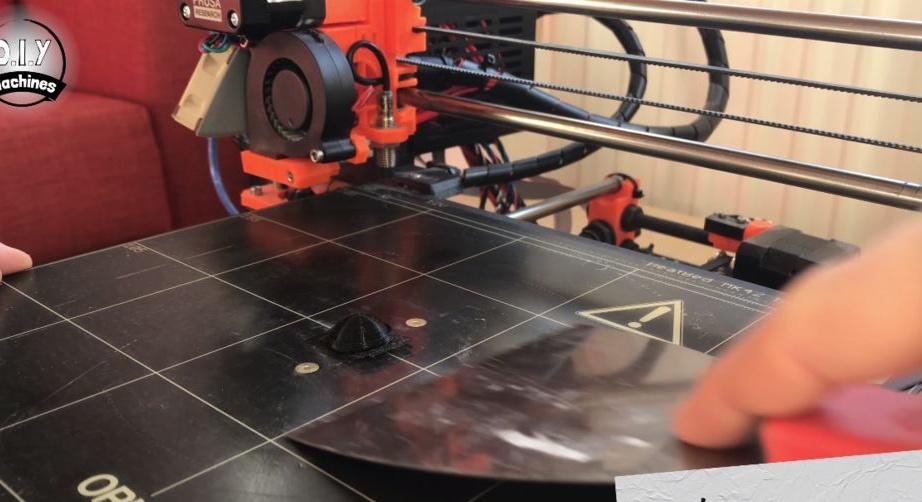
الخطوة الأولى: نصفي الطباعة ثلاثية الأبعاد
أولاً ، يطبع السيد نصفين نصفي على طابعة ثلاثية الأبعاد. يمكن تنزيل الملفات ، كما تم إرفاق ملفين أدناه.


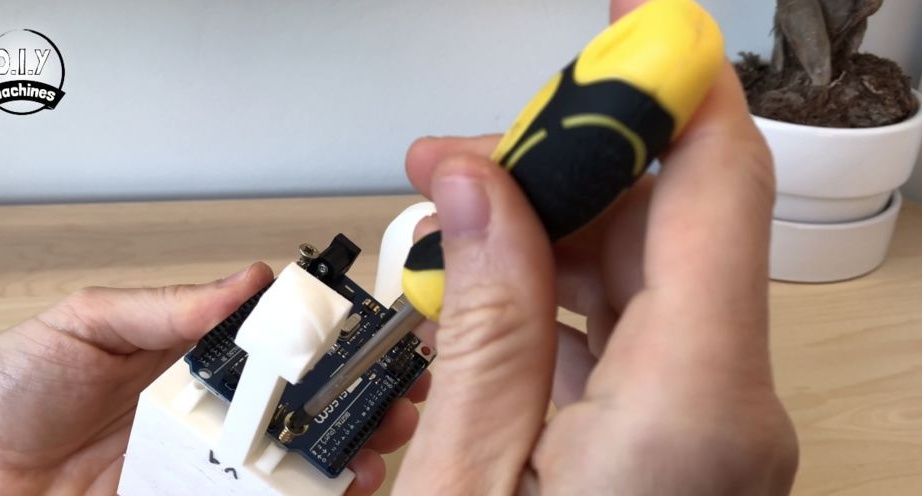
الخطوة الثانية: هيكل الطباعة ثلاثية الأبعاد
لطباعة الهيكل. ثم يثبت الهيكل اردوينو أونو. رابط للملف أدناه.
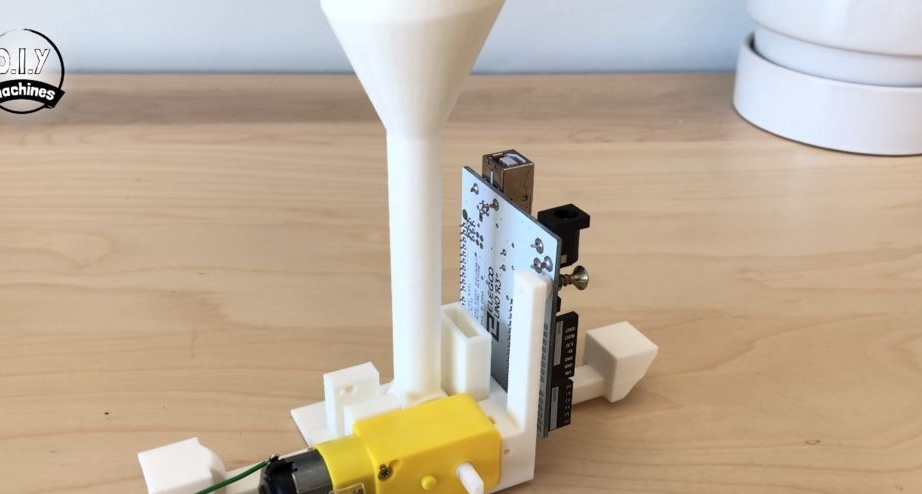
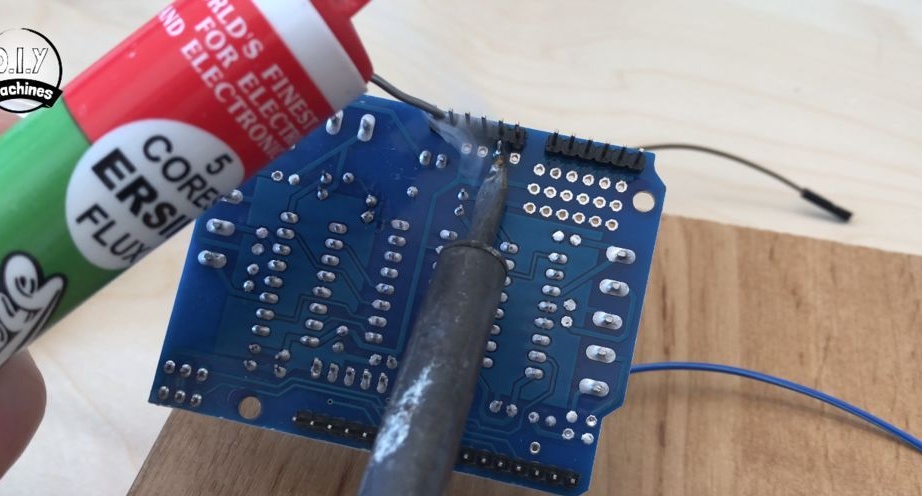
الخطوة الثالثة: محرك الجير
الجنود على اتصالات أسلاك المحركات والعتاد. يركب محركات التروس على الهيكل.
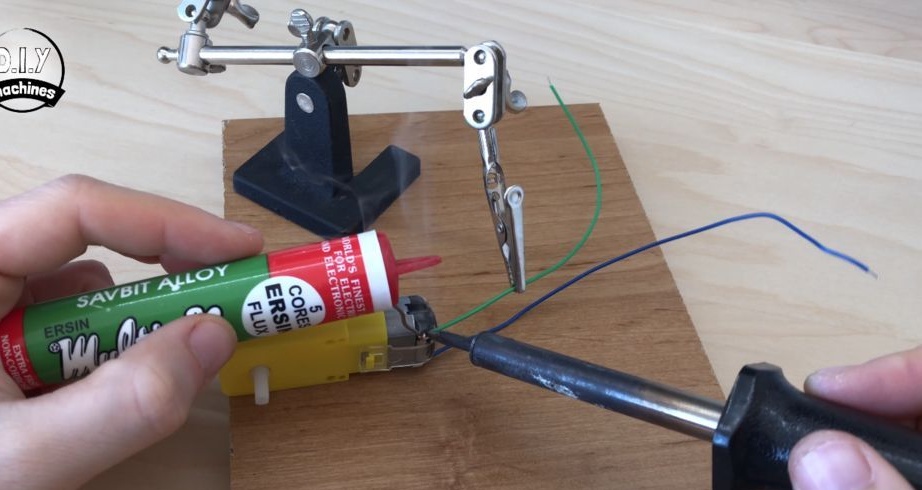
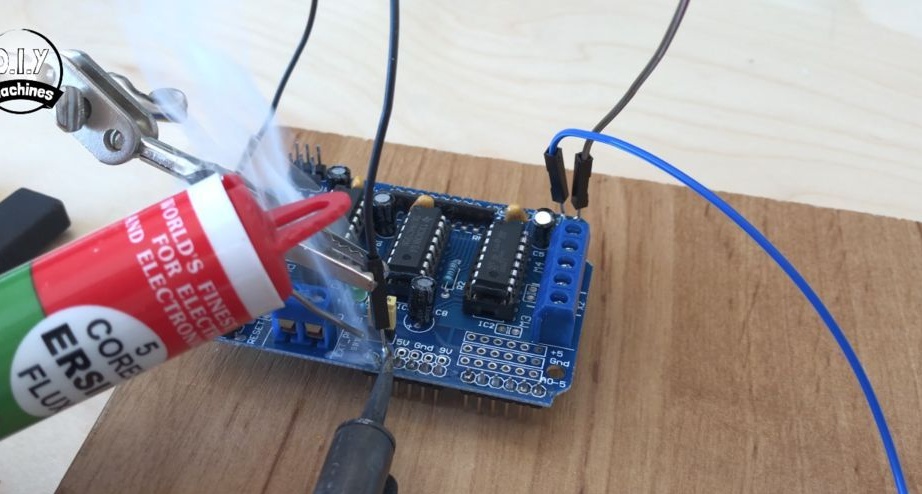
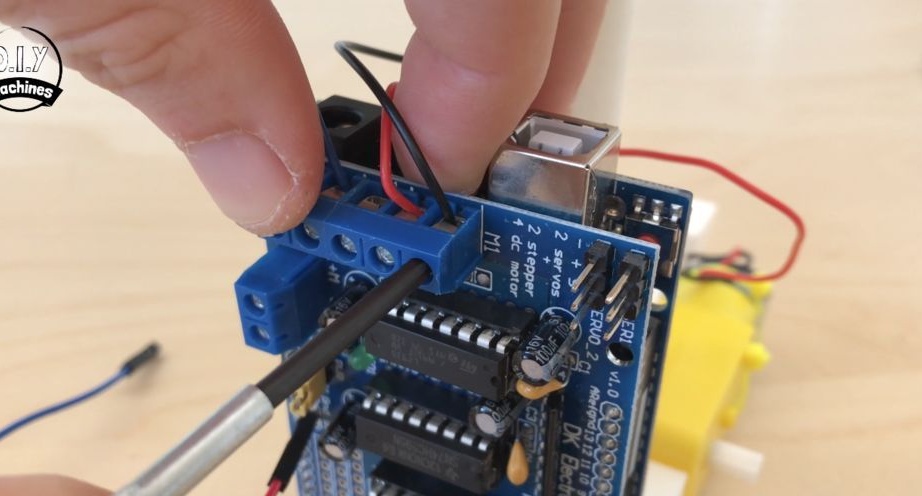
الخطوة الرابعة: سائق المحرك
أسلاك اللحام لاتصالات السائق. للتنقل بشكل أفضل ، تكون الأسلاك متعددة الألوان. أزرق -1 ؛ أسود 3.3 ؛ البني 0 ؛ الأحمر- GND (الأرض).
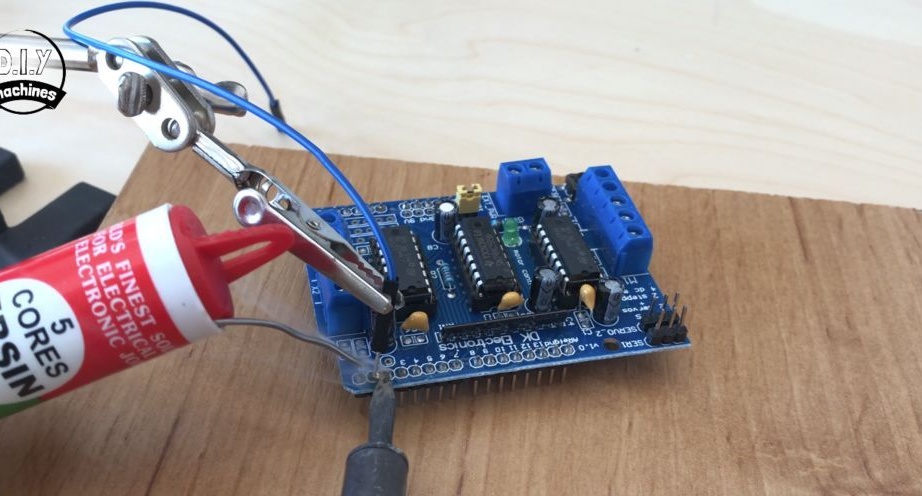
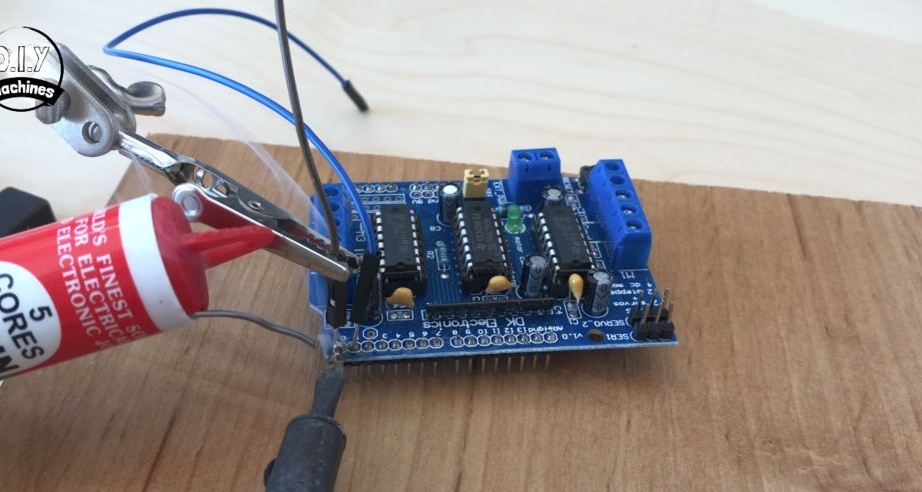
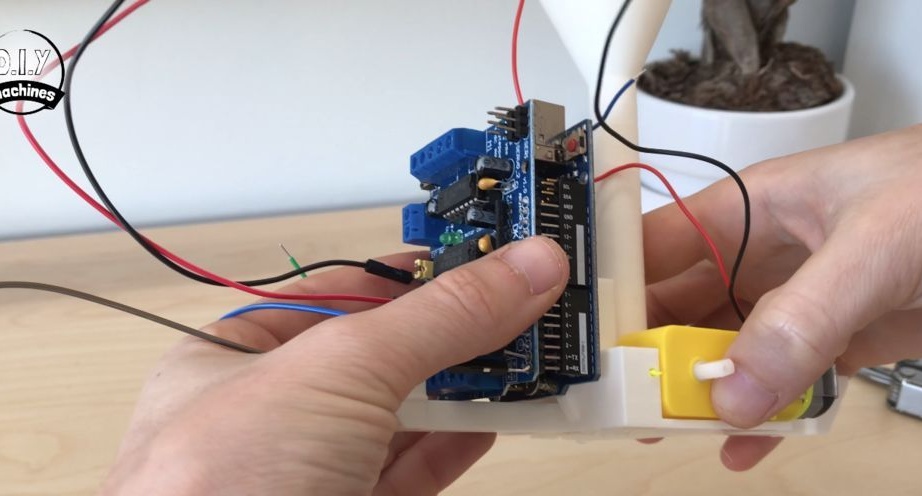
يقوم بتثبيت برنامج التشغيل على Arduinka.
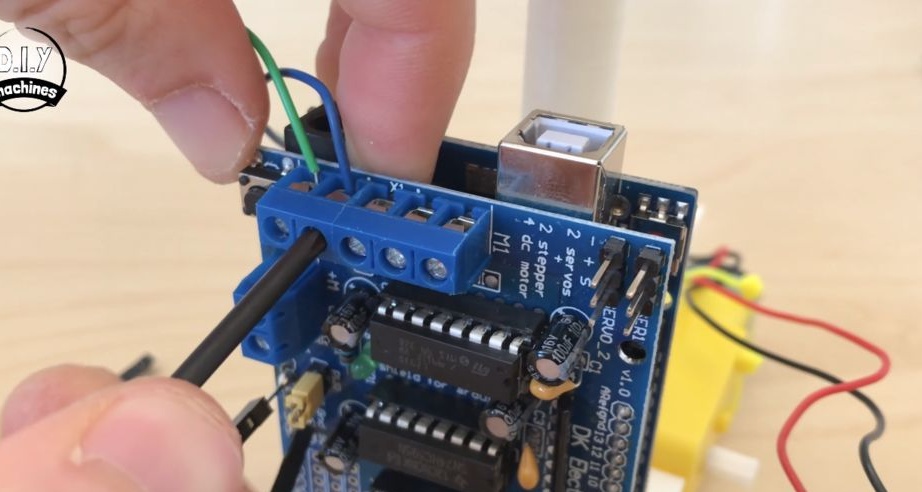
توصيل المحرك بالسائق. ننظر إلى الصورة ، المحرك الأول M1 ، والثاني M2.
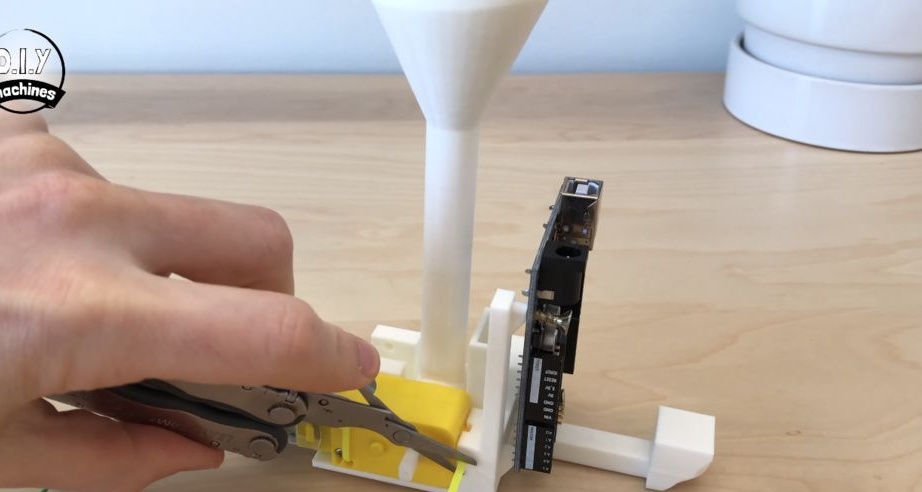
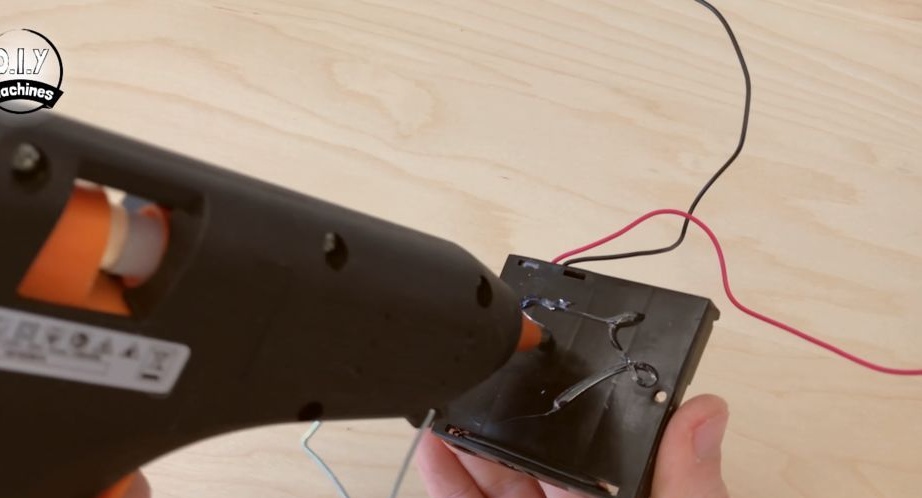
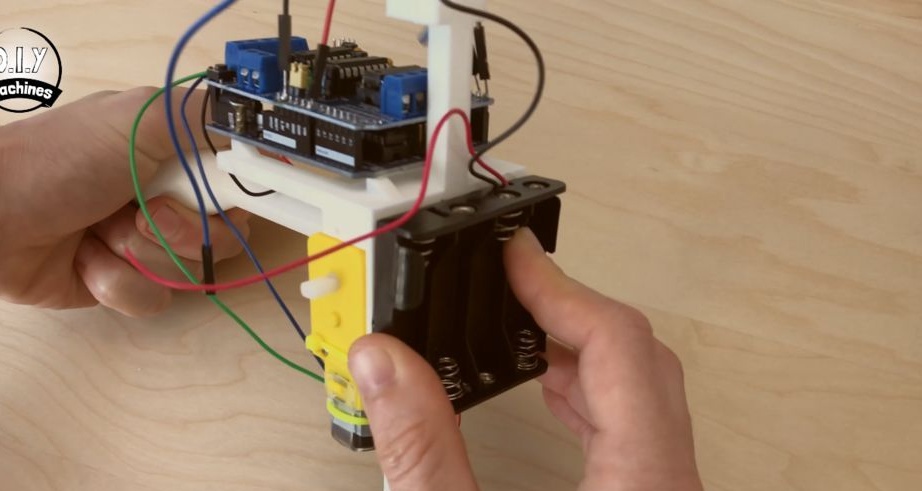
الخطوة الخامسة: مزود الطاقة
تلصق حجرة البطارية بالهيكل. يربط الأسلاك للسائق (انظر الصورة الأخيرة).

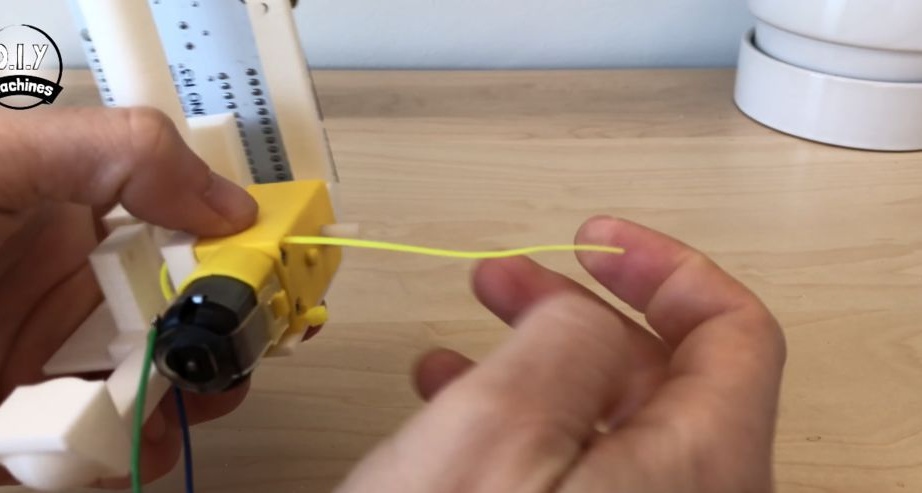
الخطوة السادسة: العجلات
يضبط العجلات.

الخطوة السابعة: تنزيل الكود
يزيل الطائر مؤقتًا.
ثم تقوم بإدخال البطاريات في الحامل وتوصيل Arduinka بالكمبيوتر.
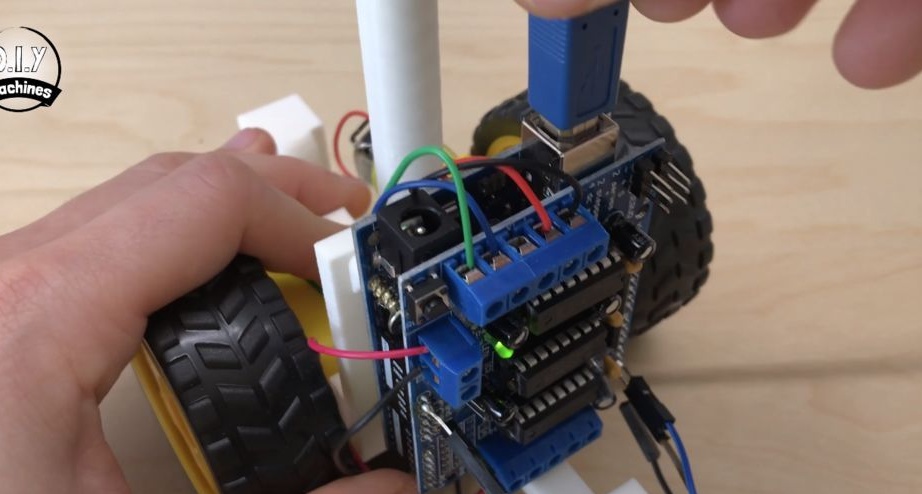
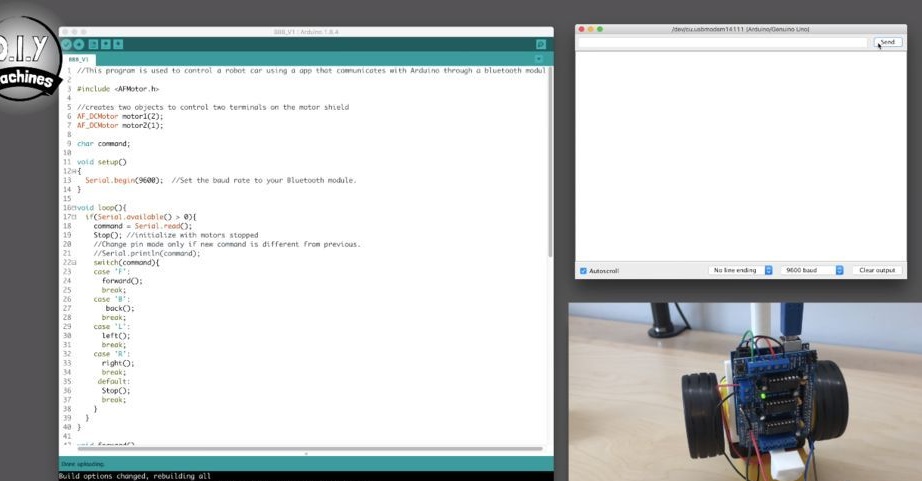
بعد التحميل ، يمكنك التحقق من تنفيذ الأوامر.
و- يطلب منه المضي قدما.
ب- يأمره بالعودة.
ل - إلى اليسار.
R على حق.
توقف S.
إذا كانت العجلات تدور في الاتجاه المعاكس أثناء الأمر الأمامي ، فيمكن تغيير الرمز. في السطر 45 نقوم بتغيير كلمة "BACKWARD" إلى "FORWARD" ، في السطر 53 "FORWARD" إلى "BACKWARD". ثم نقوم بتحميل الرمز مرة أخرى والتحقق.
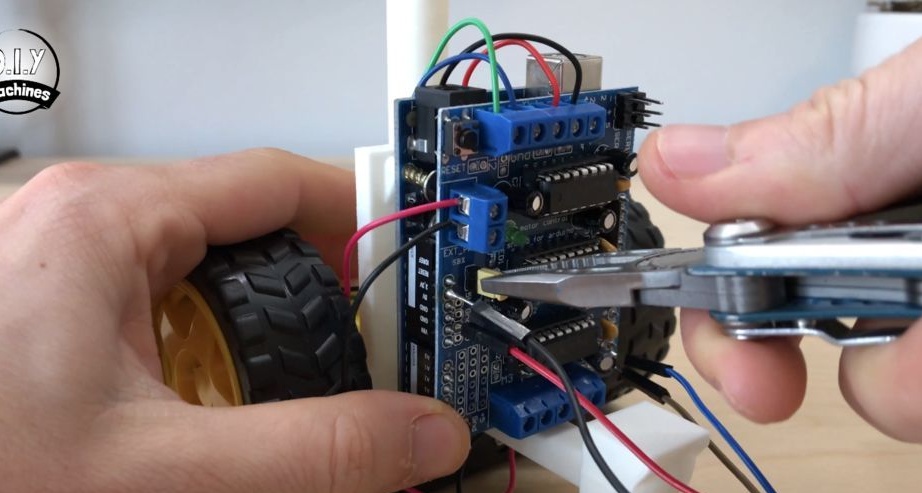
إذا كان كل شيء صحيحًا ، فافصل الكبل وقم بوضع وصلة المرور في مكانها.
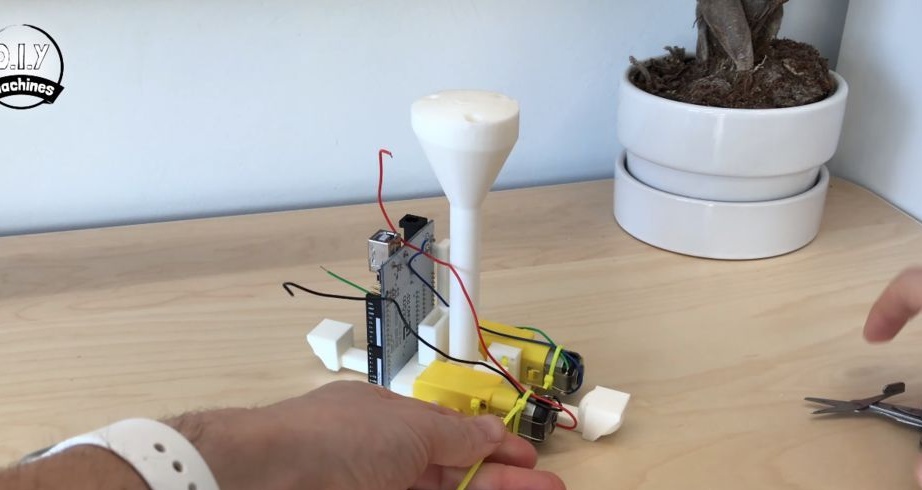
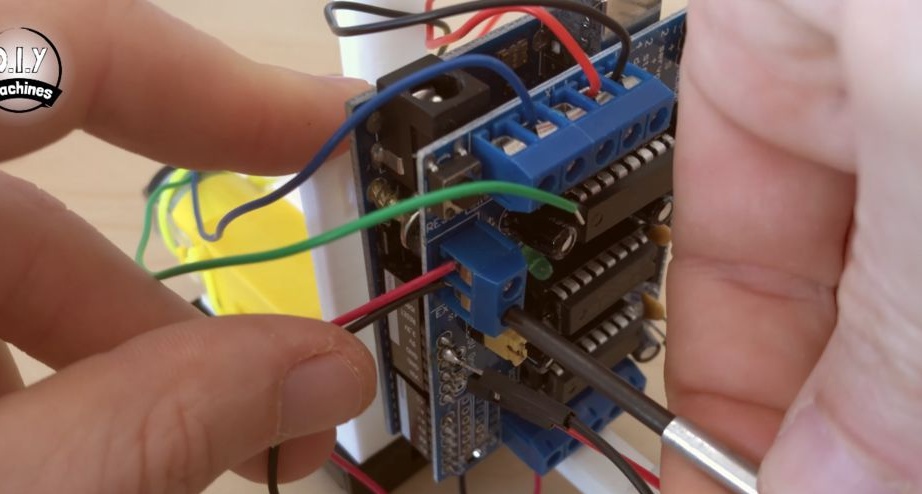
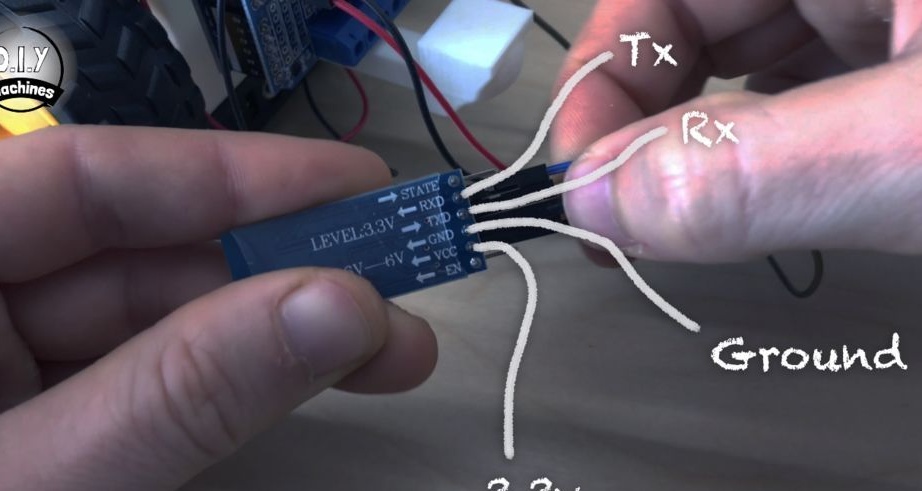
الخطوة الثامنة: وحدة بلوتوث
بعد ذلك ، قم بتوصيل وحدة بلوتوث. ينظر إلى الدبوس على السائق ويتصل. السلك أزرق (1 / RX) إلى وحدة TX ، أسود (3.3) إلى VCC ، بني (0 / Tx) إلى RXD ، أحمر GND إلى وحدة GND. إذا تم توصيل كل شيء بشكل صحيح ، يجب أن يضيء مصباح LED.
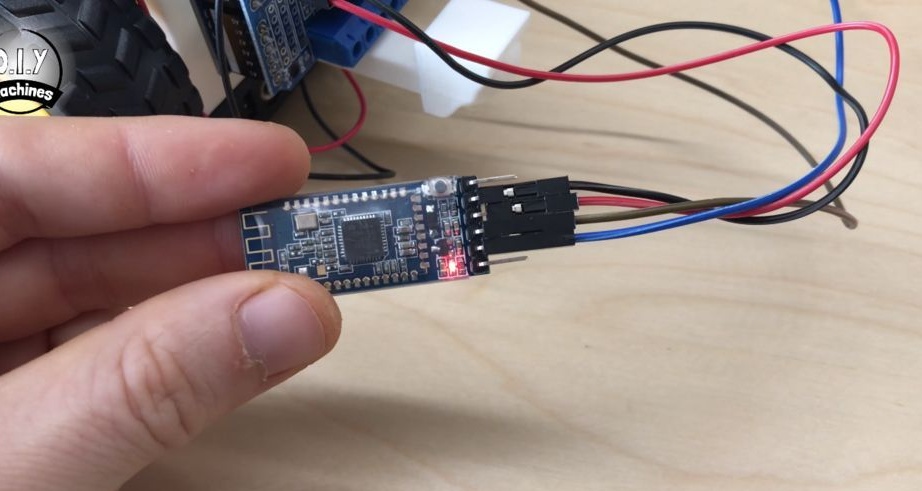
يثبت الوحدة على الهيكل.
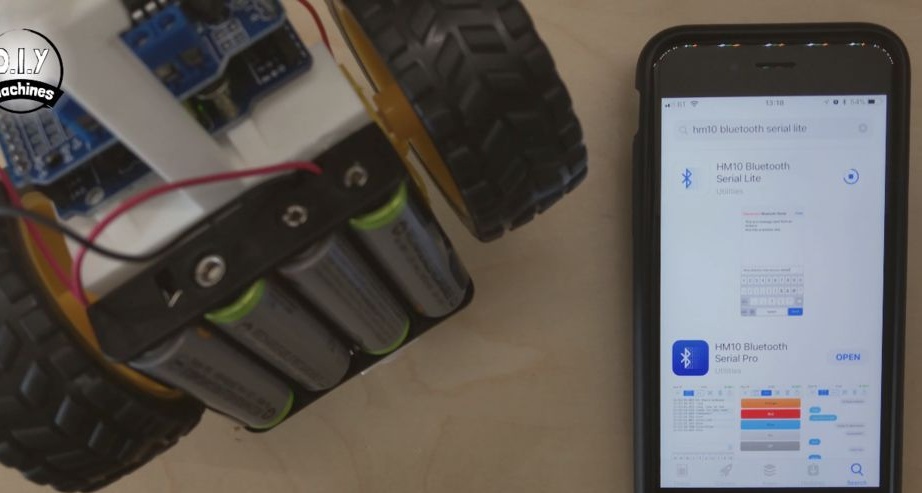
بعد ذلك ، تحتاج إلى الاتصال بالوحدة النمطية. نظرًا لأن السيد لديه هاتف ذكي من Apple ، فإنه يستخدم برنامج "HM10 Bluetooth Serial Pro" من متجر Apple. بالنسبة إلى أجهزة Android ، في سوق Play ، هناك أيضًا الكثير من البرامج. يتحقق من العملية عن طريق إرسال الأوامر "F" و "B" و "L" و "R" و "S". يمكنك أيضًا استخدام عصا التحكم الافتراضية.

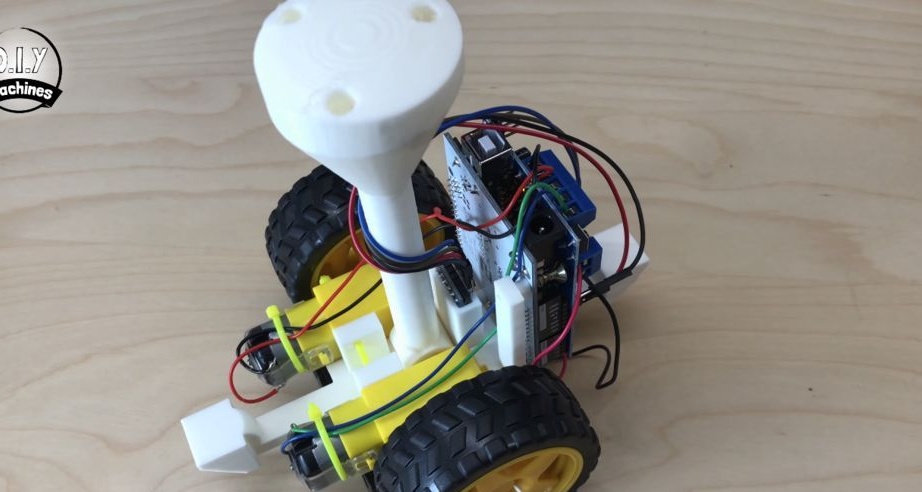
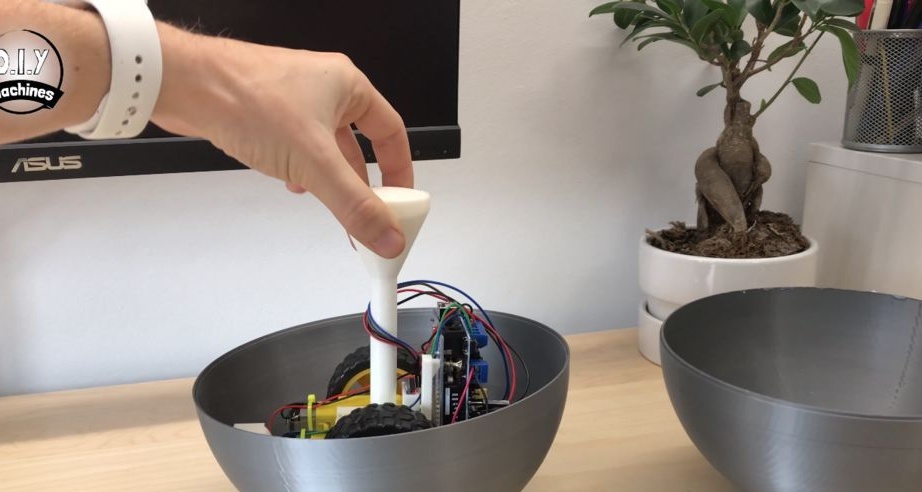
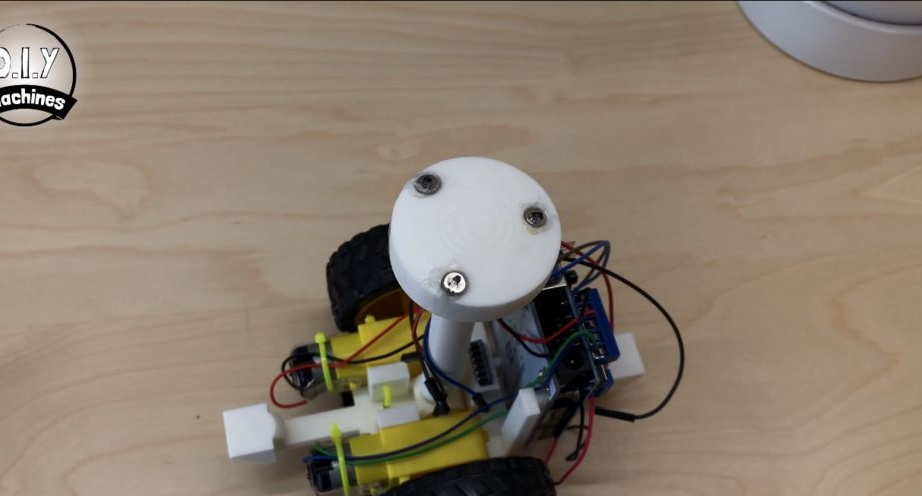
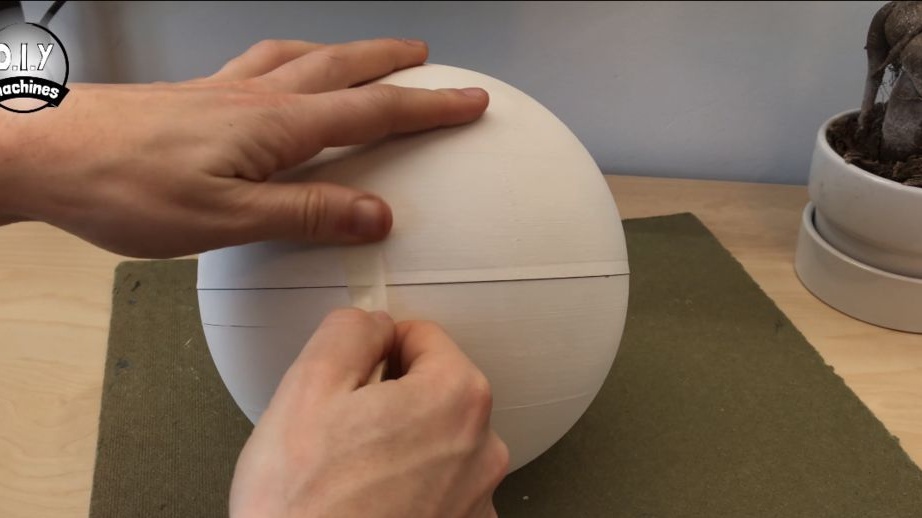
الخطوة التاسعة: الاختبار
يركب الهيكل في نصفي الكرة الأرضية. يغلق النصف الثاني. عند التقاطع ، يتدحرج بشريط. الآن يمكنك التحقق من كيفية تحرك الروبوت.

الخطوة العاشرة: قاعدة الرأس
على طابعة ثلاثية الأبعاد ، يطبع الجزء الخاص برأس الروبوت. يمكنك تنزيله أدناه.
الخطوة الحادية عشر: المغناطيس
تفكيك الجسم ومغناطيس الغراء إلى أعلى الهبوط. من المهم أن تبدو المغناطيسات مع نفس القطبين.
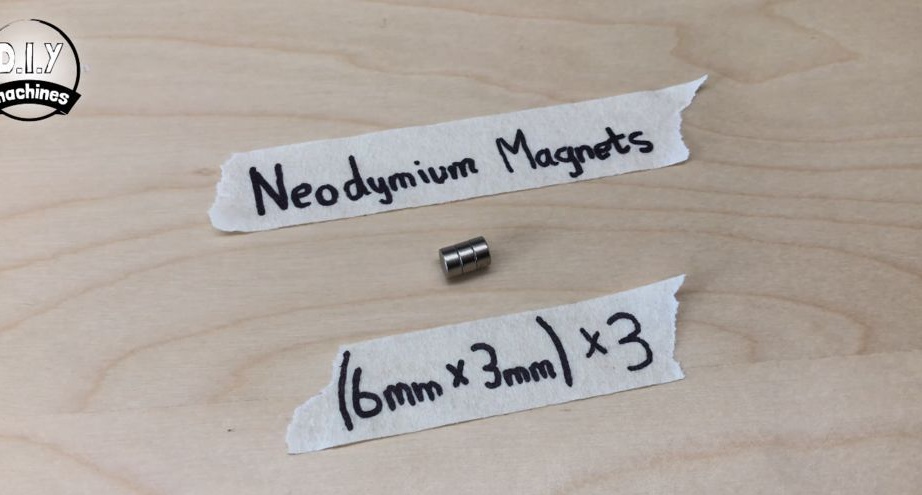
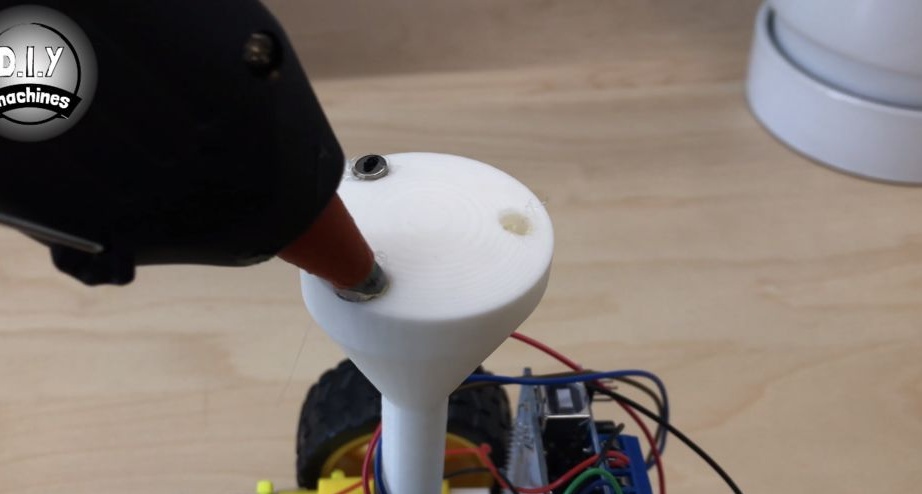
يجمع جسد الروبوت مرة أخرى. يضع منديلين على الجزء العلوي من الجسم. ممغنطة ثلاثة المغناطيس على رأس المناديل. ضع المادة اللاصقة المذوبة بالحرارة على المغناطيس وتمسك بقاعدة الرأس. ثم يقلب ويزيل الورق.





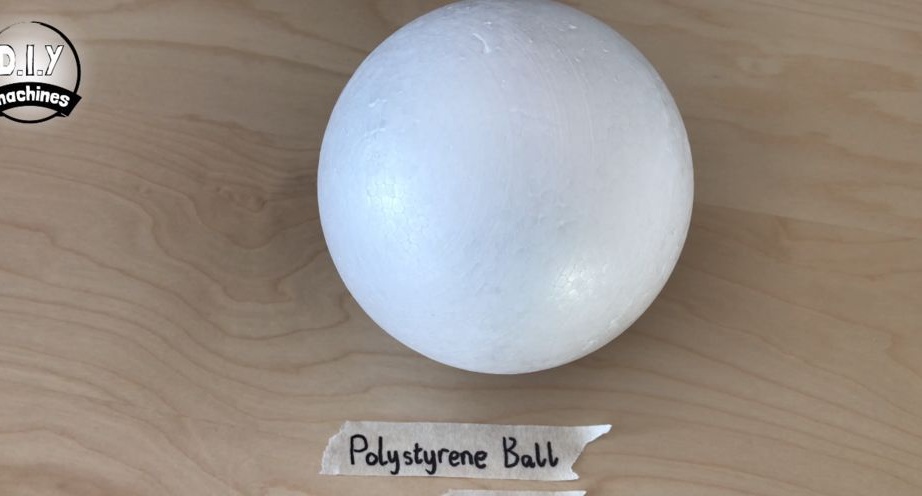
الخطوة الثانية عشرة: رأس Droid
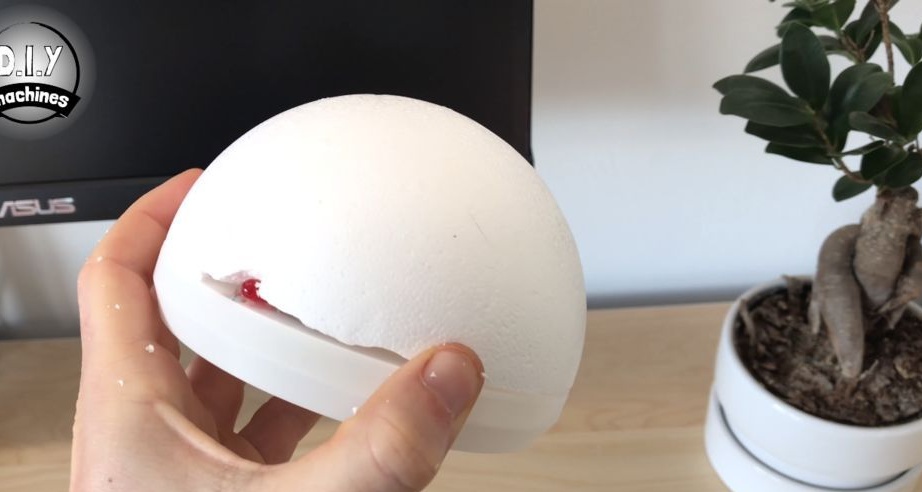
يقطع القاطع الرغوي كرة البوليسترين.


يقوم جنود LED باللون الأحمر بتلامس حجرة البطارية. يثنيها ويدخل في ثقب القاعدة. الغراء في المقصورة بمادة لاصقة تذوب الساخنة.



ثم يلتصق الغراء الساخن بالنصف الأساسي للكرة المقطوعة. تحتاج أولاً إلى عمل قطع لمصباح LED. بعد أن يتماسك الغراء ، يعالج المفصل بورق الصنفرة.




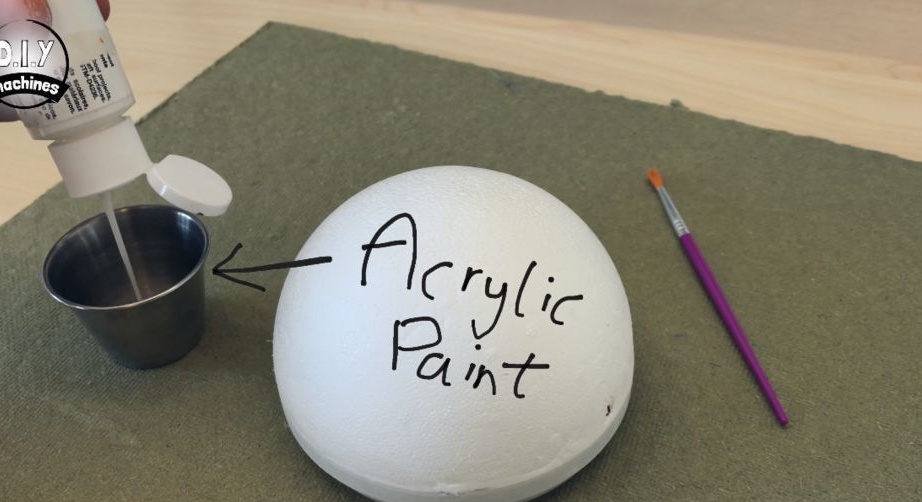
الخطوة الثالثة عشر: تلوين الرأس
ضع ثلاث طبقات من طلاء الأكريليك الأبيض على سطح الرأس. بعد التجفيف ، يتم تطبيق الطلاء.



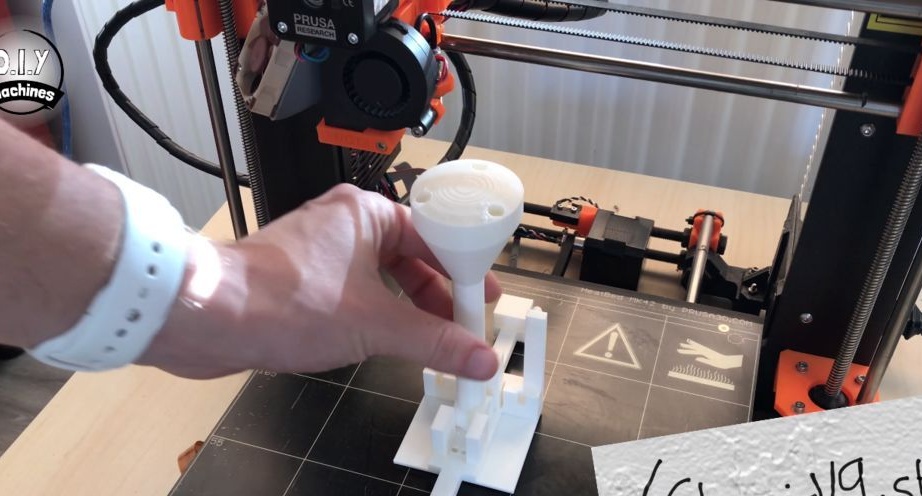
الخطوة الرابعة عشر: هوائي
صنع السيد هوائيًا من مقبض الفرشاة. قطع قطعة ورسمت بطلاء أسود. قام المستشعر بطباعة المستشعر والعين على طابعة ثلاثية الأبعاد. الملف أدناه.
الغراء الهوائي وأجهزة الاستشعار.




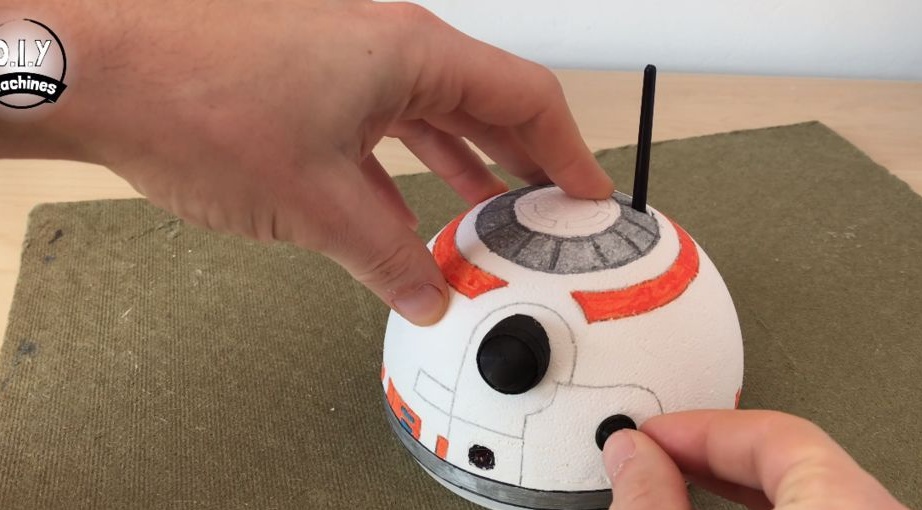
الخطوة الخامسة عشر: تلوين الجسم
حان الوقت الآن للذهاب إلى الجذع. ضع برايمر أبيض على السطح. بعد التجفيف ، يرسم صورة.





BB-8 droid astromechanical جاهز. الآن عليك القيام والمضي قهر الكون.

يمكن رؤية عملية إنشاء الروبوت بالكامل في الفيديو أدناه.
[media = http: // https: //youtu.be/x67xsED77lM]