
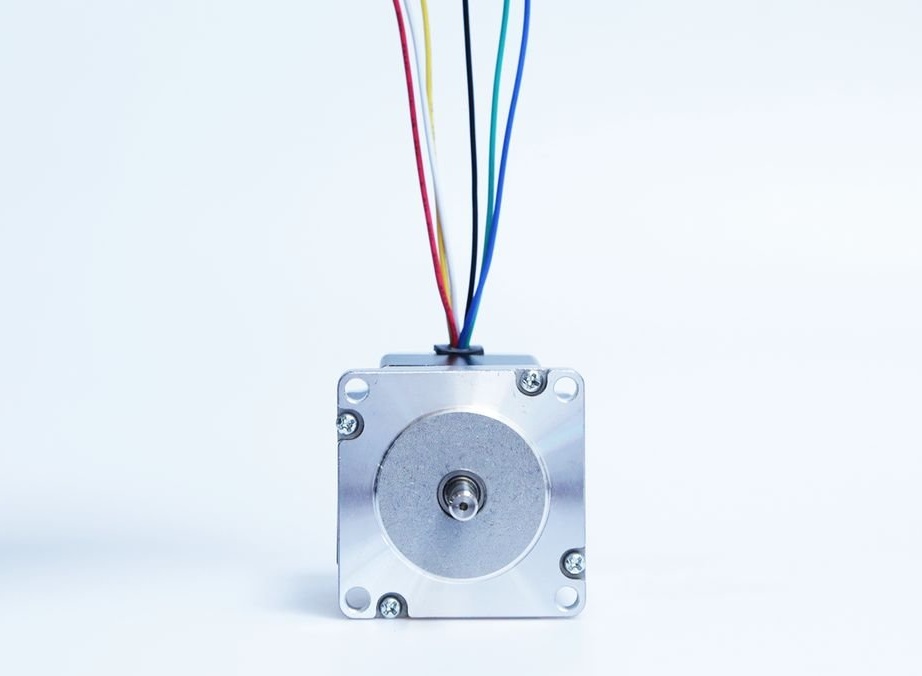
إذا كان لديك متعة تفكيك طابعة قديمة للحفظ إلكتروني مكونات ، قد تواجه العديد من المحركات الأسطوانية الغامضة مع 4 أسلاك أو أكثر بارزة من الجانبين. هل سمعت ضجيجًا نموذجيًا لطابعة ثلاثية الأبعاد لسطح المكتب أو السيمفونية الكهروميكانيكية للأقراص في محرك الأقراص المضغوطة؟ إذا كان الأمر كذلك ، فأنت تواجه محرك السائر!
محركات السائر تجعل العالم الكهروميكانيكي يدور (مع عزم دوران أعلى!) ، ولكن على عكس محرك DC التقليدي ، يتطلب التحكم في محرك السائر أكثر بقليل من التيار من خلال سلكين. ستتحدث هذه المقالة عن نظرية تصميم وتشغيل محرك السائر. بمجرد النظر في الأساسيات ، سيوضح مؤلف هذا الدليل كيفية بناء دوائر بسيطة للتحكم في محركات السائر ، ثم كيفية استخدام الدوائر الدقيقة للسائق الخاص.
الخطوة 1: ما الذي يجعل المحرك محركًا متدرجًا؟
من الذي قد يحتاج إلى أكثر من سلكين وجسر H؟ لماذا؟ حسنًا ، على عكس محركات الفرشاة التقليدية DC التي تم تصميمها لتحقيق أقصى عدد للدورات في الدقيقة (أو kV لـ RC) ، فإن محركات السائر هي محركات بدون فرش مصممة لعزم دوران عالي (سرعة أقل لاحقًا) وحركة دورانية أكثر دقة. في حين أن محرك DC النموذجي رائع لتدوير المروحة بسرعة عالية لتحقيق أقصى قدر من الجر ، فإن محرك السائر يكون أفضل للف ورقة متزامنة مع آلية نفث الحبر داخل الطابعة أو لتدوير عمود القضيب الخطي بعناية في مطحنة CNC.
في الداخل ، تعتبر المحركات السائرية أكثر تعقيدًا من محرك DC البسيط ، مع العديد من الملفات حول القلب بمغناطيس دائم ، ولكن مع هذا التعقيد الإضافي يتم توفير المزيد من التحكم. نظرًا للترتيب الدقيق للملفات المضمنة في الجزء الثابت ، يمكن أن يدور الدوار لمحرك السائر بخطوة معينة ، ويغير القطبية بين الملفات ويغير قطبيتها وفقًا لنظام الإشعال المحدد. لا يتم تصنيع جميع محركات السائر بنفس الطريقة ، ومن أجل تنفيذها الداخلي ، هناك حاجة إلى مخططات فريدة (ولكن أساسية). سنناقش الأنواع الأكثر شيوعًا من محركات السائر في الخطوة التالية.
الخطوة 2: أنواع محركات السائر
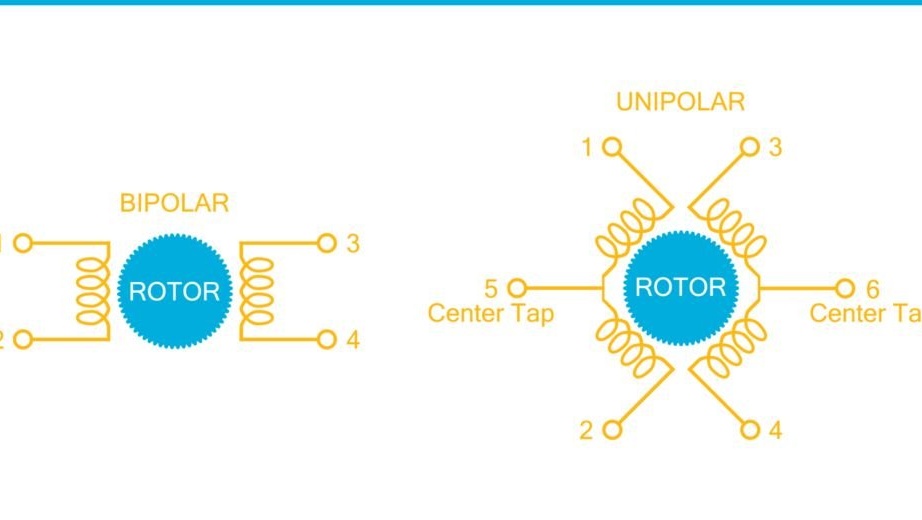
هناك العديد من التصاميم المختلفة لمحركات السائر. وتشمل هذه المقاومة أحادية القطب ، ثنائية القطب ، مقاومة عالمية ومتغيرة. سنناقش تصميم وتشغيل المحركات ثنائية القطب والقطبية الأحادية ، لأن هذا هو النوع الأكثر شيوعًا من المحركات.
محرك أحادي القطب
عادةً ما تحتوي المحركات أحادية القطب على خمسة أو ستة أو ثمانية أسلاك توصيل قادمة من القاعدة وملف واحد لكل مرحلة. في حالة محرك بخمس أسلاك ، يكون السلك الخامس هو الصنابير المركزية المتصلة لأزواج الملفات. في محرك بستة أسلاك ، كل زوج من الملفات له صنبور مركزي خاص به. في محرك من ثمانية أسلاك ، يكون كل زوج من الملفات منفصلًا تمامًا عن الآخرين ، مما يسمح بتوصيله في تكوينات مختلفة. تتيح لك هذه الأسلاك الإضافية قيادة المحركات أحادية القطب مباشرة من وحدة تحكم خارجية مع ترانزستورات بسيطة للتحكم في كل ملف على حدة. تحدد دائرة الإشعال التي يتم فيها تشغيل كل ملف اتجاه دوران عمود المحرك. لسوء الحظ ، نظرًا لأنه يتم توفير ملف واحد فقط في كل مرة ، فإن عزم الدوران لمحرك أحادي القطب سيكون دائمًا أقل من محرك ثنائي القطب من نفس الحجم. من خلال تجاوز الصنابير المركزية لمحرك أحادي القطب ، يمكن أن يعمل الآن كمحرك ثنائي القطب ، ولكن هذا سيتطلب مخطط تحكم أكثر تعقيدًا. في الخطوة الرابعة من هذه المقالة ، سنقود محرك أحادي القطب ، والذي يجب أن يوضح بعض المفاهيم المعروضة أعلاه.
محرك ثنائي القطب
عادةً ما تحتوي المحركات ثنائية القطب على أربعة أسلاك وهي أكثر متانة من محرك أحادي القطب ذي حجم مقارن ، ولكن نظرًا لأن لدينا ملفًا واحدًا لكل مرحلة ، فإننا نحتاج إلى تحويل التيار من خلال الملفات للذهاب خطوة واحدة. حاجتنا إلى تغيير التيار تعني أننا لن نكون قادرين بعد الآن على التحكم في الملفات مباشرة باستخدام ترانزستور واحد ، بدلاً من دائرة كاملة على شكل h. إن بناء الجسر h الصحيح هو أمر شاق (ناهيك عن اثنين!) ، لذلك سنستخدم سائق محرك ثنائي القطب مخصصًا (انظر الخطوة 5).
الخطوة 3: فهم مواصفات محرك السائر
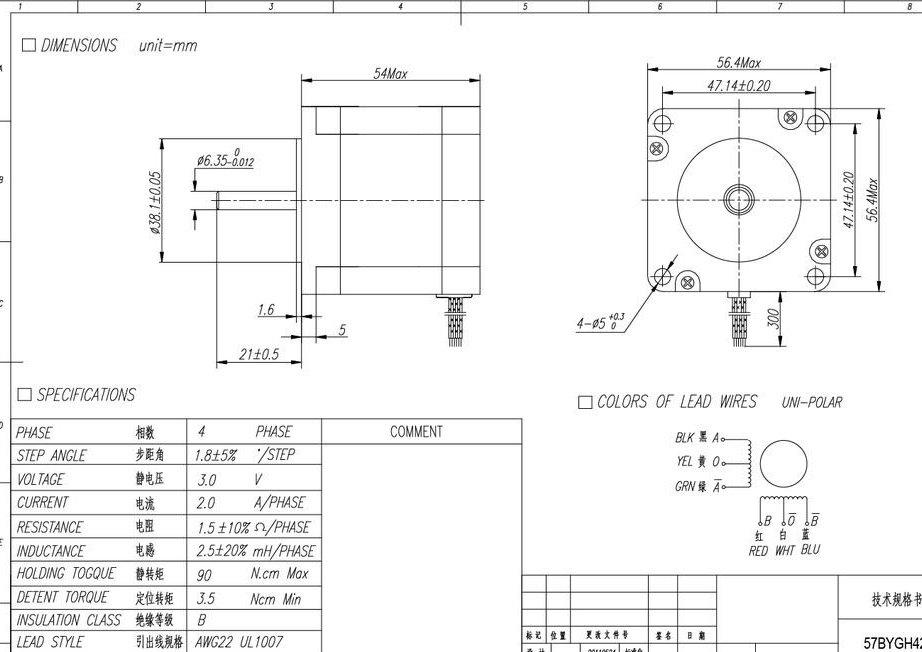
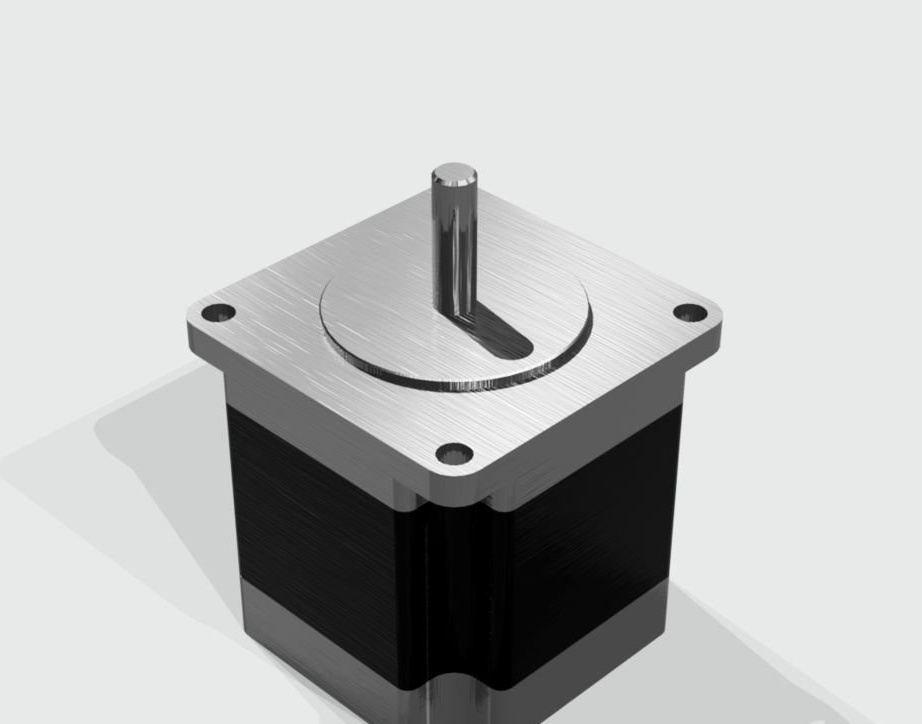
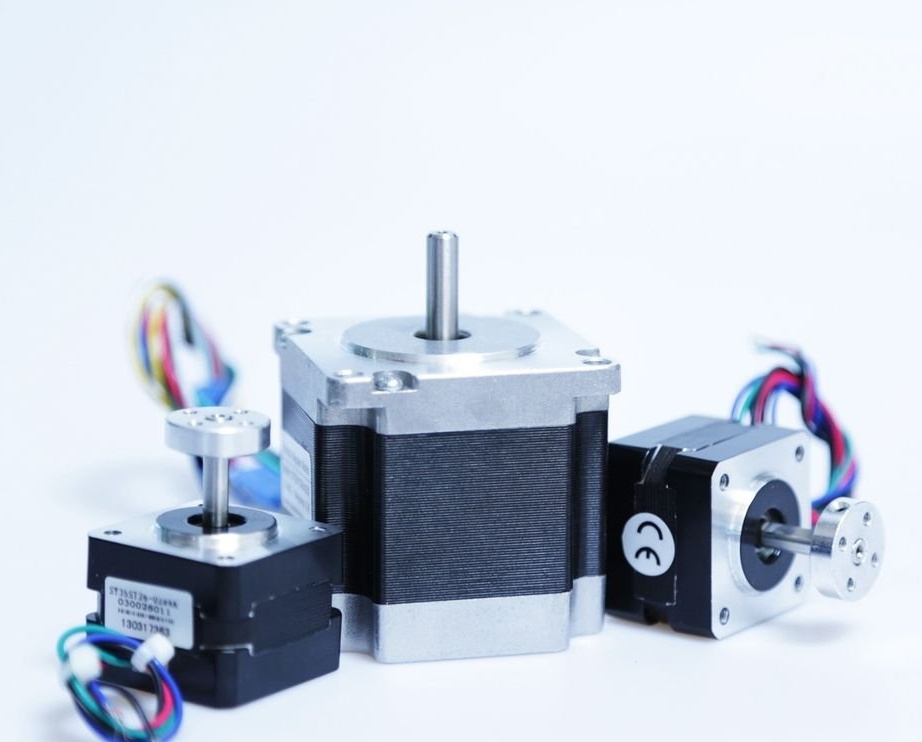
لنتحدث عن كيفية تحديد مواصفات المحرك. إذا صادفت محركًا مربعًا مع مجموعة محددة من ثلاث قطع (انظر الشكل الثالث) ، فمن المحتمل أن يكون محرك NEMA. تمتلك الرابطة الوطنية لمصنعي الأجهزة الكهربائية معيارًا محددًا لمواصفات المحرك التي تستخدم رمزًا بسيطًا للحروف لتحديد قطر لوحة المحرك ، ونوع التركيب ، والطول ، وتيار الطور ، ودرجة حرارة التشغيل ، والجهد الطوري ، والخطوات لكل دورة والأسلاك.
قراءة جواز سفر المحرك
للخطوة التالية ، سيتم استخدام هذا المحرك أحادي القطب. أعلاه جدول بيانات. وعلى الرغم من كونها موجزة ، إلا أنها توفر لنا كل ما نحتاجه للتشغيل السليم. دعونا نلقي نظرة على ما في القائمة:
المرحلة: هذا محرك أحادي القطب من أربع مراحل. يمكن أن يحتوي المحرك الداخلي على أي عدد من الملفات الحقيقية ، ولكن في هذه الحالة يتم تجميعها في أربع مراحل ، والتي يمكن التحكم فيها بشكل مستقل.
خطوة الزاوية: بدقة تقريبية تبلغ 1.8 درجة لكل خطوة ، نحصل على 200 خطوة لكل دورة. على الرغم من أن هذا قرار ميكانيكي ، بمساعدة الوصلة الدقيقة ، يمكننا زيادة هذه الدقة دون أي تغييرات على المحرك (المزيد عن هذا في الخطوة 5).
الجهد: الجهد المقنن لهذا المحرك هو 3 فولت. هذه هي دالة التيار والمقاومة الاسمية للمحرك (قانون أوم V = IR ، وبالتالي 3V = 2A * 1.5Ω)
التيار: ما مقدار التيار الذي يحتاجه هذا المحرك؟ أمبيران لكل مرحلة! سيكون هذا الرقم مهمًا عند اختيار ترانزستورات الطاقة لدائرة التحكم الأساسية.
المقاومة: 1.5 أوم لكل مرحلة ستحد من التيار الذي يمكننا توريده لكل مرحلة.
الحث: 2.5 مللي أمبير. تحد الطبيعة الاستقرائية لفائف المحرك من سرعة شحن الملفات.
لحظة الانتظار: هذا هو مقدار القوة الفعلية التي يمكننا إنشاؤها عند تطبيق الجهد على محرك السائر.
لحظة الانتظار: هذه هي لحظة الانتظار التي يمكن أن نتوقعها من المحرك عندما لا يتم تنشيطه.
فئة العزل: الفئة B هي جزء من معيار NEMA وتعطينا تصنيفًا 130 درجة مئوية. محركات السائر ليست فعالة للغاية ، والاستهلاك المستمر للتيار الأقصى يعني أنها ستصبح ساخنة للغاية أثناء التشغيل العادي.
مؤشرات اللف: قطر السلك 0.644 مم ، عدد اللفات بقطر 15.5 ، المقطع العرضي 0.326 مم 2
كشف زوج لفائف
على الرغم من أن مقاومة اللفات الملفية يمكن أن تختلف من محرك إلى آخر ، إذا كان لديك مقياس متعدد ، يمكنك قياس المقاومة على أي سلكين ، إذا كانت المقاومة أقل من 10 أوم ، فمن المحتمل أنك وجدت زوجًا! هذه في الأساس عملية خطأ تجريبية ، ولكن يجب أن تعمل لمعظم المحركات ما لم يكن لديك رقم الجزء / المواصفات.
الخطوة 4: التحكم المباشر في محركات السائر
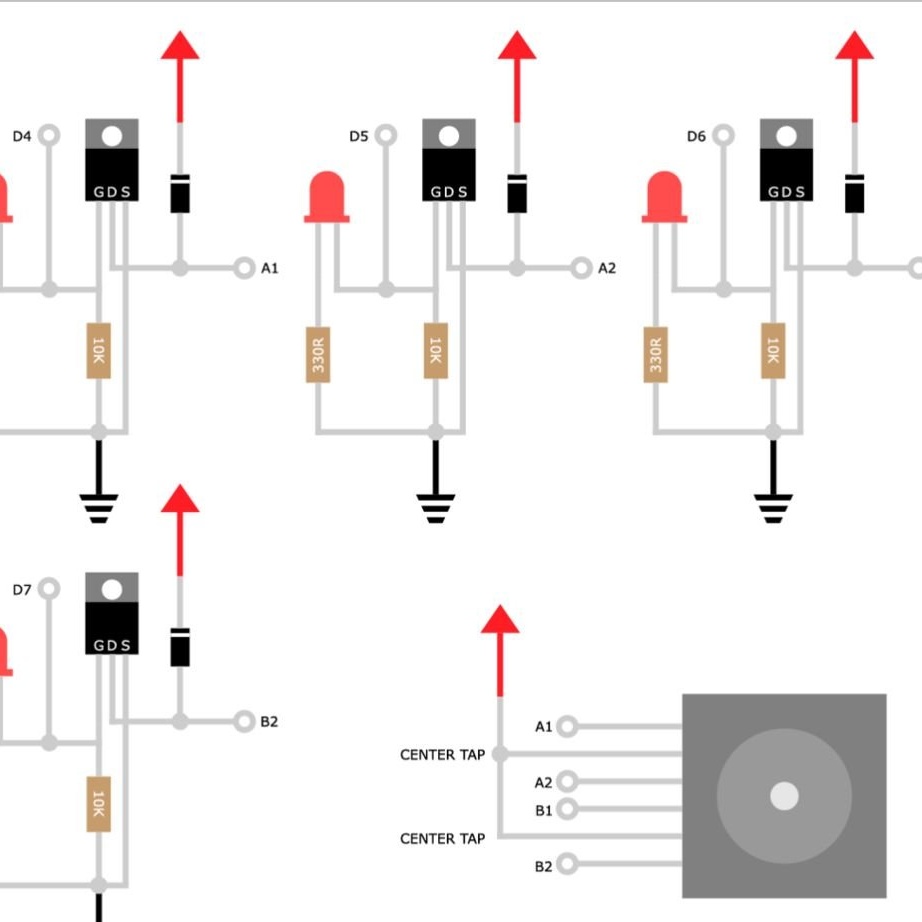
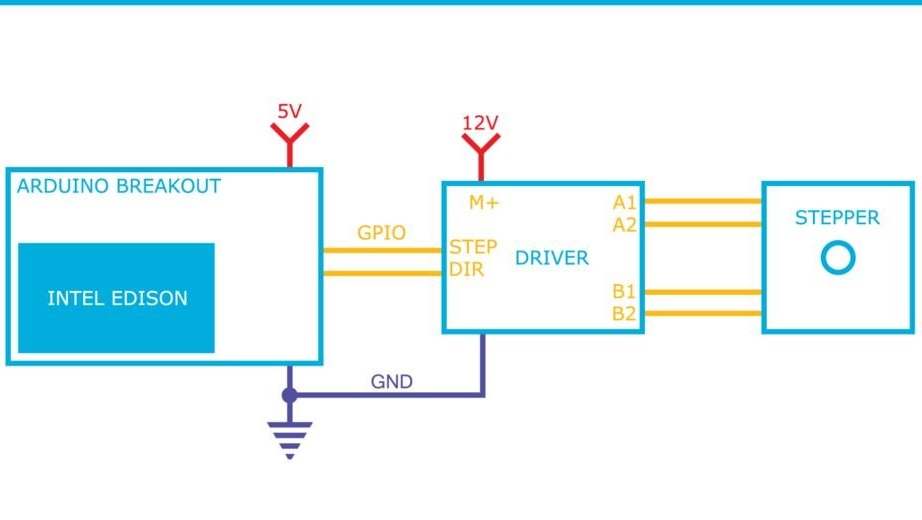
نظرًا لموقع الأسلاك في محرك أحادي القطب ، يمكننا تشغيل الملفات بالتتابع باستخدام وحدات MOSFET ذات الطاقة البسيطة فقط. يوضح الشكل أعلاه دائرة بسيطة مع ترانزستور MOS. يسمح لك هذا الترتيب بالتحكم ببساطة في مستوى المنطق باستخدام متحكم خارجي. في هذه الحالة ، فإن أسهل طريقة هي استخدام لوحة Intel Edison مع لوحة تصحيح قائمة على النمط. اردوينوللوصول بسهولة إلى GPIO (ومع ذلك ، فإن أي micro مع أربعة GPIOs ستفعل). يتم استخدام MOSFET عالي الطاقة IRF510 N قناة لهذه الدائرة. سيكون لدى IRF510 ، القادرة على استهلاك ما يصل إلى 5.6 أمبير ، طاقة مجانية كافية لتلبية احتياجات المحرك عند 2 أمبير. ليست هناك حاجة إلى مصابيح LED ، لكنها ستعطيك تأكيدًا مرئيًا جيدًا لتسلسل العمل. من المهم ملاحظة أن IRF510 يجب أن يكون لديه مستوى منطقي لا يقل عن 5 فولت حتى يمكنه استهلاك تيار كاف للمحرك. ستكون قوة المحرك في هذه الدائرة 3 فولت.
تسلسل العمل
التحكم الكامل في محرك أحادي القطب مع هذا الإعداد بسيط للغاية. من أجل تدوير المحرك ، نحتاج إلى تشغيل المراحل في الوضع المحدد بحيث يدور بشكل صحيح. لتدوير المحرك في اتجاه عقارب الساعة ، سنتحكم في المراحل على النحو التالي: A1 ، B1 ، A2 ، B2. للتدوير عكس اتجاه عقارب الساعة ، نقوم ببساطة بتغيير اتجاه التسلسل إلى B2 ، A2 ، B1 ، A1. هذا جيد للتحكم الأساسي ، ولكن ماذا لو كنت تريد المزيد من الدقة والعمل الأقل؟ دعونا نتحدث عن استخدام برنامج تشغيل مخصص لجعل الأمور أسهل بكثير!
الخطوة 5: لوحات سائق السائر
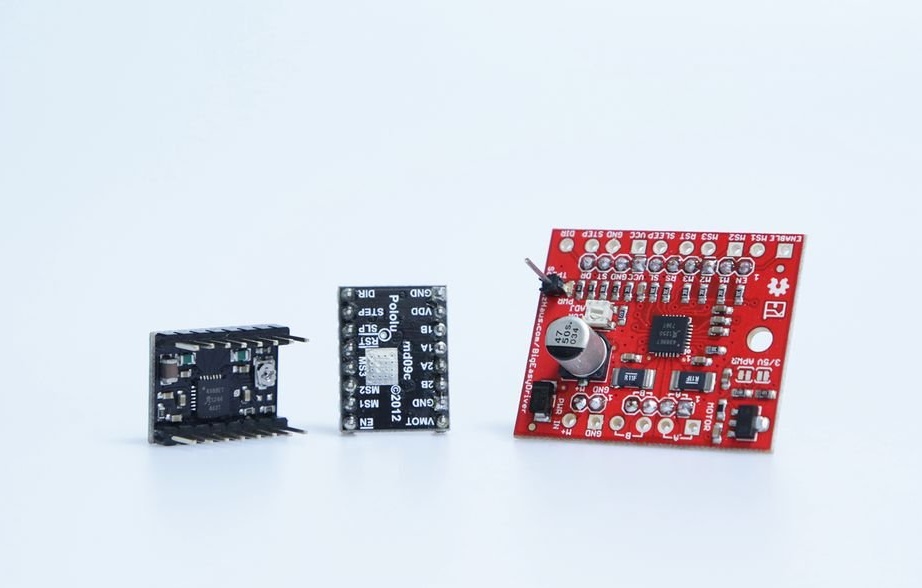
إذا كنت ترغب في بدء التحكم في المحركات ثنائية القطب (أو المحركات أحادية القطب في تكوين ثنائي القطب) ، فأنت بحاجة إلى أخذ لوحة تحكم خاصة بالسائق. تظهر الصورة أعلاه برنامج Big Easy Driver ولوحة الناقل لسائق محرك السائر A4988. كل من هذه الألواح عبارة عن لوحات دوائر مطبوعة للسائق microstep ثنائي القطب Allegro A4988 سائق السائر ، والذي يعد إلى حد بعيد أحد الرقائق الأكثر شيوعًا لقيادة محركات السائر الصغيرة. بالإضافة إلى وجود الجسور h المزدوجة اللازمة للتحكم في محرك ثنائي القطب ، توفر هذه الألواح العديد من الخيارات للتغليف الصغير وغير المكلفة.
التثبيت
هذه اللوحات العالمية لديها اتصال منخفض بشكل مثير للدهشة. يمكنك البدء في التحكم في المحرك باستخدام ثلاثة اتصالات فقط (وحدتا GPIO فقط) بوحدة التحكم الرئيسية: الأرضية المشتركة ، الملعب والاتجاه. تبقى الخطوة خطوة واتجاهها عائمًا ، لذلك تحتاج إلى ربطها بالجهد المرجعي باستخدام مقاوم الحمل. ستقوم النبضة المرسلة إلى دبوس STEP بتحريك المحرك خطوة واحدة بدقة وضوح وفقًا لمسامير مرجع microstep. يحدد المستوى المنطقي في دبوس DIR ما إذا كان المحرك سوف يدور في اتجاه عقارب الساعة أو عكس اتجاه عقارب الساعة.
محرك Microstep
اعتمادًا على كيفية تثبيت الدبابيس M1 و M2 و M3 ، يمكنك تحقيق زيادة دقة المحرك عن طريق التنقيط الدقيق. يتضمن الميكروستيب إرسال مجموعة متنوعة من النبضات لسحب المحرك بين الدقة الكهرومغناطيسية للمغناطيس المادي في الدوار ، مما يوفر تحكمًا دقيقًا للغاية. يمكن أن ينتقل A4988 من الخطوة الكاملة إلى حل الخطوة السادسة عشرة. مع محركنا 1.8 درجة ، سيوفر هذا ما يصل إلى 3200 خطوة لكل دورة. تحدث عن التفاصيل الصغيرة!
رموز / مكتبات
يمكن أن يكون توصيل المحركات أمرًا سهلاً ، ولكن ماذا عن التحكم بها؟ تحقق من مكتبات التعليمات البرمجية الجاهزة هذه للتحكم في محرك السائر:
السائر - يتيح لك الإصدار الكلاسيكي المدمج في Arduino IDE تنفيذ خطوة أساسية والتحكم في سرعة الدوران.
تسريع السائر - مكتبة كاملة الميزات تسمح لك بالتحكم بشكل أفضل في محركات متعددة وتوفر التسارع والتباطؤ الصحيحين للمحرك.
انتل C ++ MRAA السائر - مكتبة ذات مستوى أدنى لأولئك الذين يرغبون في الخوض في إدارة محرك السائر الخام C ++ باستخدام Intel Edison.
يجب أن تكون هذه المعرفة كافية بالنسبة لك لفهم كيفية العمل مع محركات السائر في العالم الكهروميكانيكية ، ولكن هذه ليست سوى البداية.
