مساء الخير ، نواصل صنع الروبوتات والألعاب. اليوم ، الخطوة التالية هي تعديل نموذج الخزان الخاص بي. تعليمات التصنيع المقروءة هنا
جوهر التعديل هو تغيير طريقة الإدارة. هذه المرة ، للتحكم سنستخدم مؤشر الليزر. بتعبير أدق ، سوف يركب الخزان خلف نقطة الليزر. سيحدد الخزان موقع النقطة من خلال مقاومات ضوئية. قائمة الضروريات مشابهة لتلك الموجودة في القائمة أعلاه محلية الصنعولكن ليس تمامًا:
- طامية 70168 ترس مزدوج
- طامية 70100 مجموعة بكرات ومسارات
- طامية 70157
- خشب رقائقي 10 مم (قطعة صغيرة)
- اردوينو Pro Mini 5V AtMega 328
- DRV 8833
- مقاومات ضوئية 5506 4 قطع.
- USB-UART لبرامج اردوينو الثابتة
- مصابيح LED مستطيلة حمراء وخضراء
- المصابيح البيضاء 5 ملم 2 قطعة.
- مقاومات 3 × 150 أوم
- بطاريات ليثيوم أيون 18650
- موصلات Dupont Dad-Mom
- أسلاك بألوان مختلفة
- جندى
- الصنوبري
- لحام الحديد
- براغي 3x40 ، 3x20 ، صواميل وغسالات لهم
- 2x10 براغي خشب
- مثقاب خشب 3 مم و 6 مم
- منشار حنق كهربائي
- دهان أكريليك
الخطوة الأولى إنتاج أجزاء الخزان.
مفصل عملية تصنيع الخزان وصفها في محلية الصنع.
تكرار ذلك لا معنى له. لذلك ، تكتمل الخطوة الأولى والثانية من محلية الصنع أعلاه.
الخطوة الثانية تركيب مقاومات ضوئية.
سنحتاج إلى مقاومات الضوء الأكثر شيوعًا ، فهي سهلة الشراء في متجر الراديو:

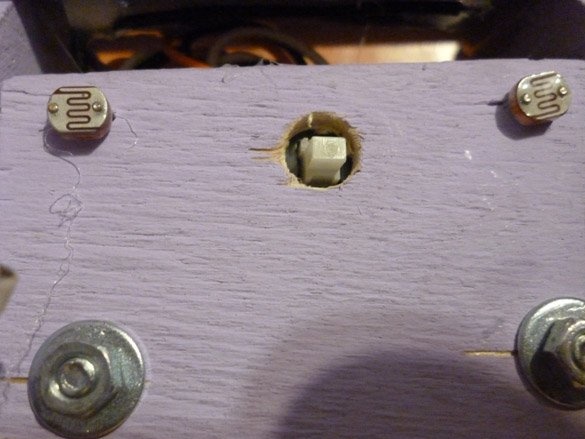
بعد ذلك ، قبل تثبيت المسارات ، تحتاج إلى إعداد أماكن لمقاومات الضوء وإدخالها هناك. لذا ، لدينا أربعة مقاومات ضوئية ، اثنان في الأمام ، واثنان في الخلف. ستكون جميعها في الجزء السفلي من العلبة ، في الزوايا. مع التراجع بمقدار 5 ملم من كل جانب ، قم بعمل فتحتين لأرجل المقاومة الضوئية. المسافة بين الفتحات 4 مم. يمكنك استخدام مثقاب أصغر قطر أو ثقب القشرة بمخرز. بعد القيام بذلك ، أدخل المقاومات الضوئية. لنبدأ بالأمام:
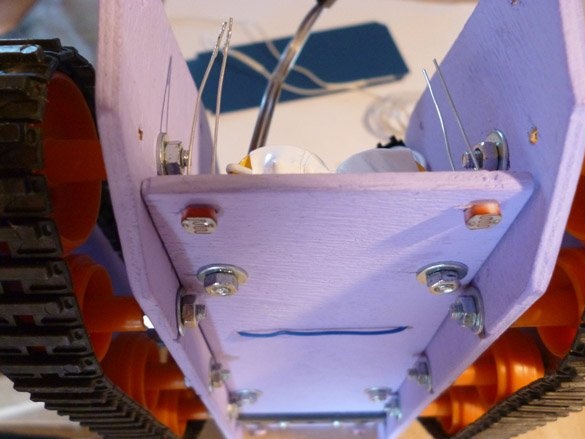
بعد إدخال مقاومات الضوء في الخشب الرقائقي ، قم بلحام الأسلاك في جهات الاتصال وموصل دوبونت للأم. نقوم بعزل مكان اللحام. يمكنك استخدام الشريط الكهربائي ، أو يمكنك ، مثلي ، وضع العزل على السلك السميك.
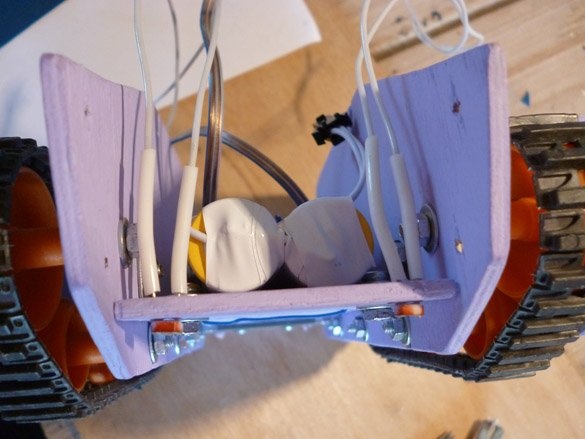
وفي الخلف نقوم أيضًا:
فيما يلي ستبدو كما يلي:
نقوم بتجميع الحالة بشكل أكبر وفقًا للتعليمات ، الرابط المشار إليه أعلاه.
لزيادة حساسية المقاومات الضوئية لنقطة الليزر والتخلص من التداخل غير الضروري ، يجب طلاءها بعلامة حمراء أو طلاء. الشيء الرئيسي هو أن الضوء يخترق الطلاء. لا ترسم عليها بالكامل.
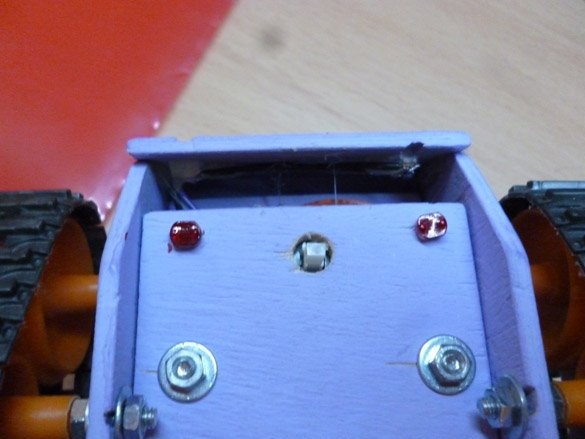
بهذه الطريقة ، سوف نزيد من حساسية أجهزة الاستشعار للنقطة الحمراء من الليزر.
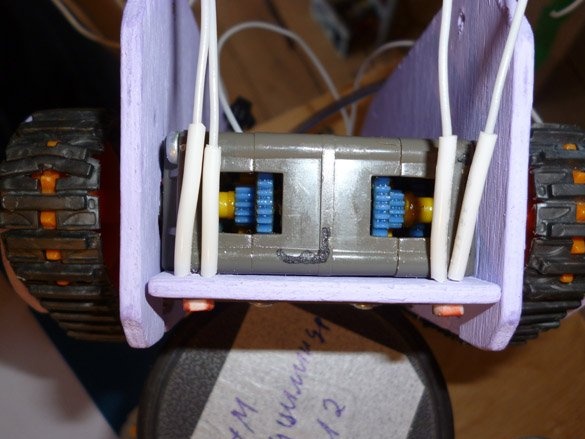
الخطوة الثالثة كهربائي.
في الخطوة الرابعة ، تصف تعليمات صنع الخزان بالتفصيل ما وكيفية توصيله. نحن نفعل كل شيء وفقًا لها ، باستثناء توصيل وحدة Bluetooth. نحن لسنا بحاجة إليه. نقوم بتوصيل أحد جهات اتصال مقاومات الضوء بـ GND. والثاني متصل بأردوينو وفقًا للمخطط:
من اليمين إلى A0 (Pin14)
من اليسار إلى A1 (Pin15)
الخلف الأيسر إلى A2 (Pin16)
الخلفي الأيمن إلى A3 (Pin17)
كأداة تحكم ، سوف نستخدم مؤشر الليزر الصيني المعتاد مع شعاع أحمر:

الخطوة 4 تحرير رسم.
لتحرير الرسم وملءه ، تحتاج إلى تنزيل Arduino IDE. نذهب إلى المسؤول موقع المشروع وتنزيل أحدث إصدار.
لا حاجة لمكتبات إضافية.
المقاومات الضوئية بعيدة عن جهاز القياس الأكثر دقة. تعتمد خصائصه ، في الممارسة ، على عدد كبير من العوامل. لذلك ، من أجل التشغيل السليم ، من الضروري ضبط كل مقاومة ضوئية. سنقوم بتصحيح القراءات عن طريق تحرير الرسم باستخدام Arduino IDE وجهاز مراقبة المنفذ. افتح الرسم:
لنبدأ بمقاومات الصورة الأمامية. في الجزء السفلي ، قم بإلغاء تعليق الخطوط الثلاثة لأجهزة الاستشعار الأمامية:
//Serial.print(senLF) ؛ // Uncomment لضبط مقاومات الضوء الأمامية
//Serial.print ("") ؛
//Serial.println(senRF) ؛وتحتاج أيضًا إلى إضافة وقفة لإتاحة الوقت لعرضها. لذلك ، قم بإلغاء تعليق هذا الخط أيضًا:
// مهلة (500) ؛
املأ الرسم التخطيطي. نضع الخزان على الطاولة ، عند إضاءة الغرفة بثريا عادية ، لا ينبغي تشغيل مصباح الطاولة. وافتح شاشة منفذ Arduino IDE. تحت الإضاءة العادية ، يجب أن تكون القراءات أكبر من 500 ، وفي نفس الوقت تقريبًا نفس المستشعرين. لنحاول تحريك مؤشر الليزر أمام أنف الخزان. يجب أن تختلف المؤشرات. كلما كانت النقطة أقرب ، كلما كانت الأرقام أصغر. يجب أن تكون في النطاق من 80 (على أقصى مسافة قريبة من النقطة) إلى 500 (على مسافة حوالي 2-3 سم).
للضبط ، استخدم المتغيرات في الرسم:
int corLF = 0 ؛ // متغيرات التصحيح ، الأمامي الأيسر
int corRF = 30 ؛ // جبهة اليمينيمكن أن تكون متغيرات التصحيح إما موجبة (مضافة إلى المستشعر) أو سلبية (مطروحة من القراءات). بتغيير هذه المتغيرات ، املأ الرسم مرة أخرى وانظر أن المؤشرات في النطاقات التي نحتاجها.
الآن تفعل الشيء نفسه مع مقاومات الضوء الخلفية. للقيام بذلك ، قم بالتعليق على الخطوط الخاصة بأجهزة الاستشعار الأمامية وقم بإلغاء تعليق الخطوط التالية:
//Serial.print(senLB) ؛ // Uncomment لضبط مقاومات الضوء الخلفية
//Serial.print ("") ؛
//Serial.println(senRB) ؛يجب ترك وقفة بدون تعليق. ننفذ نفس القياسات ، الآن فقط مع مقاومات الضوء في الخلف. واكتب متغيرات التصحيح:
int corLB = 0 ؛ // خلفي يسار
int corRB = 35 ؛ // خلفي يمينلتوضيح كيف يعمل كل شيء. يتحكم المستشعر الأمامي الأيسر في حركة المسار الأيمن للأمام ، ويتحكم المستشعر الأمامي الأيمن في المسار الأيسر إلى الأمام ، وهكذا. يتم تعديل قراءات المستشعر وفقًا للصيغ التالية:
senLF = (analogRead (senLFPin) + corLF) ؛ // جبهة اليسار
senRF = (analogRead (senRFPin) + corRF) ؛ // جبهة اليمين
senLB = (analogRead (senLBPin) + corLB) ؛ // خلفي يسار
senRB = (analogRead (senRBPin) + corRB) ؛ // خلفي يمينحيث ، senLF ، senRF ، senLB ، sen RB - القراءات المصححة
analogRead (senLFPin) ، (analogRead (senRFPin) ، (analogRead (senLBPin) ، (analogRead (senRBPin) - قراءات الاستشعار "النظيفة"
colLF ، colRF ، corLB ، corRB - متغيرات التصحيح.
ثم تترجم القراءات إلى سرعة دوران المسار المعاكس:
walRF = خريطة (senLF، 80، 500، 100، 255) ؛
walLF = الخريطة (senRF، 80، 500، 100، 255) ؛
walRB = خريطة (senLB، 80، 500، 100، 255) ؛
walLB = خريطة (senRB، 80، 500، 100، 255) ؛إذا لم تتمكن من تصحيح القراءات بأي شكل من الأشكال ، فقم بتغيير الحد الأقصى والحد الأدنى للقراءات التي تبدأ عندها المسارات في التحرك. هذه هي الأرقام 80 و 500 في خطوط التحويل المكتوبة أعلاه.
بعد الانتهاء من جميع الإجراءات ، قم بالتعليق على جميع هذه الأسطر ، واملأ الرسم التخطيطي. الآن سوف يركب الخزان خلف النقطة الحمراء لمؤشر الليزر.